1.本发明属于绞车控制技术领域,具体是一种自适应多冗余排缆系统及控制方法。
背景技术:
2.深海科考绞车在作业过程中需要通过绞车对缆绳进行回收和释放。如果缆绳在绞车卷筒上排缆不整齐,就会出现打结、重叠、挤压的现象,严重影响缆绳的使用寿命,甚至会导致缆绳受到损坏,需要排缆器可靠、稳定的导缆,把缆绳整齐的缠绕在绞车滚筒上;绞车广泛应用于海洋电缆铺设、船舶拖带、深海打捞、深海探测等场合,其主要功能是实现放缆和收缆,特别在收缆过程中需要通过排缆器使缆绳在储缆卷筒上整齐排列,这就要求排缆器与储缆卷筒保持一定的同步关系。目前,各种绞车缆绳在使用时的方法一般分两种:一是机械导缆,由机械传动链条带动排缆器跟随缆绳卷筒旋转,配合绞车的速度进行缆绳的导入和导出,该方法费时费力,且张紧力不足,整齐布缆的难度很大;二是电动导缆,由一电动机驱动备用缆绳滚筒按照一定的速度旋转,由控制绞车的速度来配合电动机的速度进行导缆,该方法由于电动机的速度不能调节,不仅整齐布缆的难度很大,而且也很容易造成缆绳打结。以上方法均没有配备自动排缆装置,对排缆整齐度要求很高的万米缆绳而言,当缆绳在导缆过程中,易出现缠绕不均、乱绳、咬绳甚至缆绳打结现象,会导致缆绳间的严重挤压和摩擦,加剧缆绳的非正常磨损,直接影响缆绳使用寿命和作业安全。因此,亟需研发一种自适应多冗余排缆系统及控制方法,对缆绳进行自动化整齐存储缠绕。
技术实现要素:
3.本发明的目的是提供一种自适应多冗余排缆系统及控制方法,可实现对缆绳进行自动化整齐存储缠绕,智能化程度高,以免造成缆绳压绳、乱绳、咬绳等现象,从而减少缆绳互相挤压的情况,增加使用寿命,并且排缆器的自适应多冗余系统能够增加排缆的效率。
4.为解决上述技术问题,本发明提供了一种自适应多冗余排缆系统,包括排缆器、储缆卷筒和控制系统,所述排缆器设有导绳器,所述导绳器上设有角度传感器,所述角度传感器用于测量所述导绳器的缆绳与所述储缆卷筒主轴的角度变化量;所述排缆器一端设有丝杆编码器,另一端设有伺服电机,所述储缆卷筒一端设有卷筒编码器,另一端设有变频电机;所述卷筒编码器用于实时测量缆绳在所述储缆卷筒上的位置,所述丝杆编码器用于实时测量缆绳在所述排缆器上的位置;所述丝杆编码器、角度传感器和卷筒编码器将测量的数据传输给所述控制系统,所述控制系统对数据进行分析并发送指令给所述伺服电机和变频电机,所述伺服电机驱动所述排缆器,所述变频电机驱动所述储缆卷筒,确保所述排缆器和储缆卷筒的同步运转。
5.一种自适应多冗余排缆控制方法,用于控制一种自适应多冗余排缆系统,所述控制方法包括以下步骤:
6.s1.位置计算:丝杆编码器和卷筒编码器零位校验,通过卷筒节距与圈数对应排缆行程计算排缆伺服的行程;
7.s2.速度匹配计算:先进行卷筒速度计算,再计算与卷筒对应的排缆比例速度,从而确定排缆伺服速度;
8.s3.排缆方向判断:通过储缆卷筒动作判断排缆移动方向,确定排缆伺服方向;
9.s4.排缆效果检验并修正:通过角度传感器判断缆绳角度是否超设定范围或者通过丝杆编码器和卷筒编码器检验导绳器对应丝杆位置是否与储缆卷筒匹配,判断导绳器位置超前或滞后,以修正排缆伺服位置。
10.本发明的有益效果是:
11.本发明智能化程度高,可实现对缆绳进行自动化整齐存储缠绕,以免造成缆绳压绳、乱绳、咬绳等现象,从而减少缆绳互相挤压的情况,增加使用寿命,并且排缆器的自适应多冗余系统能够增加排缆的效率。
附图说明
12.为了更清楚地说明本发明的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
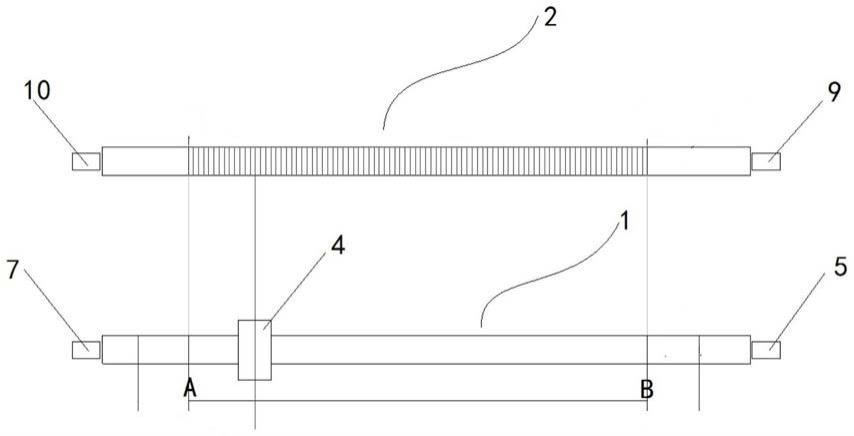
13.图1是本发明结构示意图;
14.图2是本发明排缆器结构示意图;
15.图中:1
‑
排缆器,2
‑
储缆卷筒,4
‑
导绳器,5
‑
丝杆编码器,6
‑
角度传感器,7
‑
伺服电机,9
‑
卷筒编码器,10
‑
变频电机。
具体实施方式
16.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.如图1
‑
2所示,一种自适应多冗余排缆系统,包括排缆器1、储缆卷筒2和控制系统,排缆器1设有导绳器4,导绳器4上设有角度传感器6,角度传感器6用于测量导绳器4的缆绳与储缆卷筒2主轴的角度变化量;排缆器1一端设有丝杆编码器5,另一端设有伺服电机7,储缆卷筒2一端设有卷筒编码器9,另一端设有变频电机10;卷筒编码器9用于实时测量缆绳在储缆卷筒2上的位置,丝杆编码器5用于实时测量缆绳在排缆器1上的位置;丝杆编码器5、角度传感器6和卷筒编码器9将测量的数据传输给控制系统,控制系统对数据进行分析并发送指令给伺服电机7和变频电机10,伺服电机7驱动排缆器1,变频电机10驱动储缆卷筒2,确保排缆器1和储缆卷筒2的同步运转。
18.一种自适应多冗余排缆控制方法,用于控制一种自适应多冗余排缆系统,包括以下步骤:
19.s1.位置计算:丝杆编码器和卷筒编码器零位校验,通过卷筒节距与圈数对应排缆行程计算排缆伺服的行程;
20.s2.速度匹配计算:先进行卷筒速度计算,再计算与卷筒对应的排缆比例速度,从
而确定排缆伺服速度;
21.s3.排缆方向判断:通过储缆卷筒动作判断排缆移动方向,确定排缆伺服方向;
22.s4.排缆效果检验并修正:通过角度传感器判断缆绳角度是否超设定范围或者通过丝杆编码器和卷筒编码器检验导绳器对应丝杆位置是否与储缆卷筒匹配,判断导绳器位置超前或滞后,以修正排缆伺服位置。
23.步骤s1中根据储缆卷筒每层的容绳圈数,储缆卷筒绳槽的节距计算导绳器在丝杆上的起点位置、终点位置及行程ab,储缆卷筒每转一圈,导绳器在丝杆上移动一个节距的行程;
24.步骤s3中导绳器的运动方向由储缆卷筒的当前层数和零点位置判断;
25.导绳器与储缆卷筒同步运行时,通过调节导绳器在丝杆上相对卷筒的位置,可以调节缆绳相对卷筒超前或滞后(半圈或一圈绳的距离);
26.步骤s4中,通过角度传感器判断缆绳角度是否超设定范围,首先设定正常状态下,通过导绳器的缆绳与储缆卷筒主轴的角度为定值y;当出现排缆器乱绳时,设定最小乱缆一圈的情况下,计算缆绳与储缆卷筒主轴的角度的变化量x,在触摸屏上设定x;通过角度传感器检测缆绳与储缆卷筒主轴角度变化量,并传输给plc控制系统;超过触摸屏设定的定值x,plc控制系统进行报警并执行纠偏指令,调节伺服电机的加速或减速,以校正导绳器相对卷筒的位置。
27.步骤s4中,通过丝杆编码器和卷筒编码器检验导绳器对应丝杆位置是否与储缆卷筒匹配;
28.缆绳在储缆卷筒轴向位移速度=导绳器在丝杆上的轴向位移速度,
29.卷距筒转速r*卷筒节距d=伺服跟随速度r*排缆丝杆节距d,plc控制系统运用速度比例跟随算法控制伺服电机同步跟随储缆卷筒转速运行,确保导绳器与储缆卷筒同步;
30.通过丝杆编码器实时测量导绳器在丝杆上的位置,通过卷筒编码器实时测量缆绳在储缆卷筒上的当前位置,并将信号传输至plc控制系统,plc控制系统进行两者相比较,判断导绳器是超期或滞后,并进行报警并执行纠偏指令,调节伺服电机的加速或减速,使导绳器回到相对储缆卷筒的正确位置范围内。
31.步骤s4中,通过角度传感器判断缆绳角度和通过丝杆编码器和卷筒编码器检验导绳器对应丝杆位置是否与储缆卷筒匹配,两种方法可单独使用,也可联合使用来判断导绳器位置超前或滞后。
32.以上所揭露的仅为本发明的一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。