1.本发明属于激光测距技术领域,特别是涉及一种基于单光源多频混合外差式激光跟踪仪系统。
背景技术:
2.1985年,lau k,hocken r等人第一次提出激光跟踪仪的概念,并作为机器人或数控机床的校准工具,为机器人系统提供末端执行器的实时位置反馈,实现高精度的动态目标测量。激光跟踪技术目前已广泛应用于机器臂校准、航空航天,海洋工程,大尺寸零件装备制造等多方面领域,可以实现动态装配校准、形位检测、大尺寸测量等功能。
3.目前国外已有多家公司生产激光跟踪仪产品,如徕卡(leica)公司、美国api公司以及法如(faro)公司;这三家公司的激光跟踪仪主要采用双光源分别实现绝对距离测量、相对位移测量功能,如专利[激光跟踪器、提供附加测量功能的方法以及计算机可读存储介质,公开号:cn105699983b]提到的跟踪仪系统采用he
‑
ne激光器和半导体激光器作为光源,导致测量基准波长不同,难以溯源的问题。
[0004]
国内对激光跟踪系统的研究起步较晚,天津大学和哈尔滨工业大学设计的单站式跟踪仪虽然精度较高,但跟踪系统都是基于双频干涉仪的相对位移测量,缺少绝对测距仪,需要对“鸟巢”位置标定,并且要求跟踪测量过程中无断光,若光束被障碍物遮挡或跟踪距离过远、跟踪速度过快导致断光,需要将目标移回“鸟巢”,很难应对需不断更换场地的测量任务。中国科学院研制的激光跟踪仪[劳达宝等,飞秒激光跟踪仪跟踪光路的优化设计与分析,中国激光,2019,46(03):192
‑
199.]虽然测量精度较高,但该系统选择双飞秒激光器作为绝对距离精细测量系统的光源,飞秒激光频率梳技术光源体积难以减小且光源复杂,成本较高,难以集成。
技术实现要素:
[0005]
本发明针对现有激光跟踪仪系统多用两个光源实现绝对距离、相对位移及位置探测器psd位置变化测量,导致测量基准波长不同,难以溯源的问题,提出了一种基于单光源多频混合外差式激光跟踪仪系统,实现光源同步溯源、减小系统体积的目的。
[0006]
本发明是通过以下技术方案实现的,本发明提出一种基于单光源多频混合外差式激光跟踪仪系统,光源采用双纵模he
‑
ne激光器1,在所述激光器1后放置二分之一波片2,所述二分之一波片2改变所述激光器1输出的两偏振态相互垂直偏振光的偏振方向;光束经过二分之一波片2后进入第一偏振分光棱镜3,并通过第一偏振分光棱镜3分成水平偏振态和竖直偏振态两束光,水平偏振态光束与经第三反射镜11反射后的竖直偏振态光束分别通过第一四分之一波片4和第二四分之一波片12后变为圆偏振光,再分别通过第二偏振分光棱镜5、第四偏振分光棱镜13形成四束偏振光,四束偏振光对应通过第一声光移频器6、第二声光移频器8、第三声光移频器14和第四声光移频器17形成四个不同频率的偏振光;
[0007]
第二声光移频器8产生的偏振光经第二反射镜9反射后与第一声光移频器6产生的
偏振光在第三偏振分光棱镜10合光;第四声光移频器17产生的偏振光经第五反射镜18反射后与第三声光移频器14产生的偏振光在第五偏振分光棱镜15合光;从第三偏振分光棱镜10合光输出的光束在第二非偏振分光棱镜30分为第一透射光束和第一反射光束;所述第一反射光束经第七偏振分光棱镜31后分为第一水平偏振光和第一竖直偏振光;所述第一竖直偏振光依次经过第八反射镜32、跟踪反射镜33入射到目标靶镜34,经目标靶镜34反射后的反射光再次经过跟踪反射镜33、第八反射镜32入射到第十一反射镜39,经第十一反射镜39反射的反射光进入第三非偏振分光棱镜40分为第二透射光束和第二反射光束;所述第二透射光束与经第九反射镜35反射后的第一水平偏振光在第八偏振分光棱镜36合光,第八偏振分光棱镜36输出的合光光束经第三偏振片37干涉后形成干涉测量信号进入第三光电探测器38;所述第二反射光束进入位置探测器41,经位置探测单元电路根据探测光敏面上光斑偏移量与绝对距离测量量解耦目标靶镜34的空间偏移量;
[0008]
所述第一透射光束经第六反射镜19反射后与从第五偏振分光棱镜15合光输出的光束在第一非偏振分光棱镜20中合成具有四个频率的第三透射光束和第三反射光束,所述第三透射光束经过第一偏振片26干涉后进入第一光电探测器27,作为参考信号;所述第三反射光束经第六偏振分光棱镜21后分成第二水平偏振光和第二竖直偏振光,所述第二水平偏振光依次经过第四四分之一波片24、第七反射镜25、跟踪反射镜33入射到目标靶镜34,经目标靶镜34反射后的反射光再次经过跟踪反射镜33、第七反射镜25、第四四分之一波片24变成竖直偏振光回到第六偏振分光棱镜21;所述第二竖直偏振光经过第三四分之一波片22入射到角锥棱镜23经角锥棱镜23反射后的反射光再次通过第三四分之一波片22后以透射形式回到第六偏振分光棱镜21,并与第六偏振分光棱镜21中的另一束光束合成一束光后经第二偏振片28干涉后形成绝对距离测量信号进入第二光电探测器29;所述第一光电探测器27和第二光电探测器29经绝对距离测量电路连接到上位机。
[0009]
进一步地,所述绝对距离测量电路包括混频信号处理单元、多频信号分离单元、信号整形单元和数字鉴相单元;所述第一光电探测器27输出的参考信号和第二光电探测器29输出的测量信号同步输入混频信号处理单元,混频信号处理单元进行下变频处理后将信号输入给多频信号分离单元进行滤波处理,滤波处理后经过信号整形单元将信号变成方波信号,所述方波信号经数字鉴相单元完成相位测量,并将相位测量结果传输给上位机。
[0010]
进一步地,经第一偏振片26干涉后进入第一光电探测器27的信号以及经第二偏振片28干涉后进入第二光电探测器29的信号包含两类不同的相位信息;一类由ν1 f1与ν2 f3构成频率为ν1‑
ν2的精测尺相位信息,一类由ν1 f1与ν1 f2构成频率为f1‑
f2的粗测尺相位信息;其中,f1<<ν1,f3<<ν2;ν1为水平偏振态光束频率,ν2为竖直偏振态光束频率;f1为第一声光移频器移频频率,f2为第二声光移频器移频频率,f3为第三声光移频器移频频率。
[0011]
进一步地,所述激光器的两纵模间距为δν。
[0012]
进一步地,四个声光移频器采用同源dds声光移频器;所述的四个声光移频器移频后的衍射光束同取 1级或
‑
1级;所述的四个声光移频器中第二声光移频器8与第三声光移频器14移频频率相同,第一声光移频器6、第二声光移频器8与第四声光移频器17的移频频率各不相同。
[0013]
进一步地,所述双纵模he
‑
ne激光器1产生的偏振态互相垂直的两纵模激光通过二分之一波片2调整偏振方向为水平和竖直方向。
[0014]
进一步地,所述数字鉴相单元完成两个相位差的计算,并根据两个相位差由公式l=(m
s
ε
s
)λ
s
/2得到待测绝对距离l,其中λ
s
为精测尺波长,m
s
为精测相位信号的整数部分,ε
s
为精测相位差。
[0015]
进一步地,多频混合的参考信号经所述多频信号分离单元提取出频率为f1‑
f2的正弦波信号作为绝对距离粗测尺参考信号和相对位移参考信号;所述相对位移参考信号与第三光电探测器38输出的相对位移测量干涉信号根据迈克尔逊干涉原理,经相对相位测量电路处理后得到相对位移量。
[0016]
本发明有益效果为:
[0017]
1、本发明提出的激光跟踪系统通过对双纵模激光器进行多声光移频以获得多频率激光,利用光源的双纵模间隔构建绝对测距精测尺,多声光移频器的移频差构建绝对测距粗测尺及实现双频光干涉相对位移测量,并依靠多反射镜反射与偏振棱镜分光合光实现多波长绝对距离、相对位移及psd位置的同步测量,改进现有激光跟踪仪采用多光源导致测量基准不同,难以溯源的问题。
[0018]
2、本发明利用两个光电探测器实现多波长测距法的信号探测,通过后续电路实现多频测尺分离,简化现有装置中用四个光电探测器分离多频测尺,减小系统体积的同时提高测量同步性,使得系统易于集成化。
[0019]
3、本发明采用同源声光移频器以提高多频测尺的测量同步性。
附图说明
[0020]
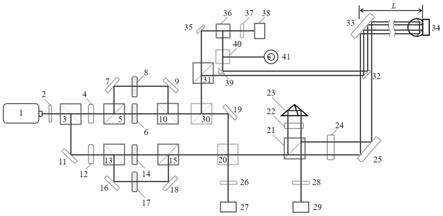
图1为本发明基于单光源多频混合外差式激光跟踪仪系统结构示意图;
[0021]
图2为本发明测量数据处理流程图;
[0022]
图中标号说明:双纵模he
‑
ne激光器1、二分之一波片2、第一偏振分光棱镜3、第一四分之一波片4、第二偏振分光棱镜5、第一声光移频器6、第一反射镜7、第二声光移频器8、第二反射镜9、第三偏振分光棱镜10、第三反射镜11、第二四分之一波片12、第四偏振分光棱镜13、第三声光移频器14、第五偏振分光棱镜15、第四反射镜16、第四声光移频器17、第五反射镜18、第六反射镜19、第一非偏振分光棱镜20、第六偏振分光棱镜21、第三四分之一波片22、角锥棱镜23、第四四分之一波片24、第七反射镜25、第一偏振片26、第一光电探测器27、第二偏振片28、第二光电探测器29、第二非偏振分光棱镜30、第七偏振分光棱镜31、第八反射镜32、跟踪反射镜33、目标靶镜34、第九反射镜35、第八偏振分光棱镜36、第三偏振片37、第三光电探测器38、第十一反射镜39、第三非偏振分光棱镜40、位置探测器41。
具体实施方式
[0023]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0024]
结合图1
‑
2,本发明提出一种基于单光源多频混合外差式激光跟踪仪系统,光源采用双纵模he
‑
ne激光器1,在所述激光器1后放置二分之一波片2,所述二分之一波片2改变所述激光器1输出的两偏振态相互垂直偏振光的偏振方向;光束经过二分之一波片2后进入第
一偏振分光棱镜3,并通过第一偏振分光棱镜3分成水平偏振态和竖直偏振态两束光,水平偏振态光束与经第三反射镜11反射后的竖直偏振态光束分别通过第一四分之一波片4和第二四分之一波片12后变为圆偏振光,再分别通过第二偏振分光棱镜5、第四偏振分光棱镜13形成四束偏振光,四束偏振光对应通过第一声光移频器6、第二声光移频器8、第三声光移频器14和第四声光移频器17形成四个不同频率的偏振光;所述形成四个不同频率的偏振光分别为形成ν1 f1、ν1 f2、ν2 f3、ν2 f4频率的偏振光;ν1为水平偏振态光束频率,ν2为竖直偏振态光束频率;f1为第一声光移频器移频频率,f2为第二声光移频器移频频率,f3为第三声光移频器移频频率,f4为第四声光移频器移频频率。
[0025]
第二声光移频器8产生的偏振光经第二反射镜9反射后与第一声光移频器6产生的偏振光在第三偏振分光棱镜10合光;第四声光移频器17产生的偏振光经第五反射镜18反射后与第三声光移频器14产生的偏振光在第五偏振分光棱镜15合光;从第三偏振分光棱镜10合光输出的光束在第二非偏振分光棱镜30分为第一透射光束和第一反射光束;所述第一反射光束经第七偏振分光棱镜31后分为第一水平偏振光和第一竖直偏振光;所述第一竖直偏振光依次经过第八反射镜32、跟踪反射镜33入射到目标靶镜34,经目标靶镜34反射后的反射光再次经过跟踪反射镜33、第八反射镜32入射到第十一反射镜39,经第十一反射镜39反射的反射光进入第三非偏振分光棱镜40分为第二透射光束和第二反射光束;所述第二透射光束与经第九反射镜35反射后的第一水平偏振光在第八偏振分光棱镜36合光,第八偏振分光棱镜36输出的合光光束经第三偏振片37干涉后形成干涉测量信号进入第三光电探测器38;所述第二反射光束进入位置探测器41,经位置探测单元电路根据探测光敏面上光斑偏移量与绝对距离测量量解耦目标靶镜34的空间偏移量。
[0026]
所述第一透射光束经第六反射镜19反射后与从第五偏振分光棱镜15合光输出的光束在非偏振分光棱镜20中合成具有四个频率的第三透射光束和第三反射光束,所述第三透射光束经过第一偏振片26干涉后进入第一光电探测器27,作为参考信号;所述第三反射光束经第六偏振分光棱镜21后分成第二水平偏振光和第二竖直偏振光,所述第二水平偏振光依次经过第四四分之一波片24、第七反射镜25、跟踪反射镜33入射到标靶镜34,经目标靶镜34反射后的反射光再次经过跟踪反射镜33、第七反射镜25、第四四分之一波片24变成竖直偏振光回到第六偏振分光棱镜21;所述第二竖直偏振光经过第三四分之一波片22入射到角锥棱镜23经角锥棱镜23反射后的反射光再次通过第三四分之一波片22后以透射形式回到第六偏振分光棱镜21,并与第六偏振分光棱镜21中的另一束光束合成一束光后经第二偏振片28干涉后形成绝对距离测量信号进入第二光电探测器29;所述第一光电探测器27和第二光电探测器29经绝对距离测量电路连接到上位机。
[0027]
所述绝对距离测量电路包括混频信号处理单元、多频信号分离单元、信号整形单元和数字鉴相单元;所述第一光电探测器27输出的参考信号和第二光电探测器29输出的测量信号同步输入混频信号处理单元,混频信号处理单元进行下变频处理后将信号输入给多频信号分离单元进行滤波处理,滤波处理后经过信号整形单元将信号变成方波信号,所述方波信号经数字鉴相单元完成相位测量,并将相位测量结果传输给上位机。
[0028]
所述数字鉴相单元完成两个相位差的计算,并根据两个相位差由公式l=(m
s
ε
s
)λ
s
/2得到待测绝对距离l,其中λ
s
为精测尺波长,m
s
为精测相位信号的整数部分,ε
s
为精测相位差。
[0029]
经第一偏振片26干涉后进入第一光电探测器27的信号以及经第二偏振片28干涉后进入第二光电探测器29的信号包含两类不同的相位信息;一类由ν1 f1与ν2 f3构成频率为ν1‑
ν2的精测尺相位信息,一类由ν1 f1与ν1 f2构成频率为f1‑
f2的粗测尺相位信息;其中,f1<<ν1,f3<<ν2;ν1为水平偏振态光束频率,ν2为竖直偏振态光束频率;f1为第一声光移频器移频频率,f2为第二声光移频器移频频率,f3为第三声光移频器移频频率。
[0030]
多频混合的参考信号经所述多频信号分离单元提取出频率为f1‑
f2的正弦波信号作为绝对距离粗测尺参考信号和相对位移参考信号;所述相对位移参考信号与第三光电探测器38输出的相对位移测量干涉信号根据迈克尔逊干涉原理,经相对相位测量电路处理后得到相对位移量。
[0031]
所述激光器的两纵模间距为δν。激光器至少包括:激光管、激光管高压电源块、分光镜、沃拉斯顿棱镜、二象限探测器和稳频电路板结构;两个光电探测器的带宽均小于双纵模he
‑
ne激光器1的纵模间距δν。所述双纵模he
‑
ne激光器1产生的偏振态互相垂直的两纵模激光通过二分之一波片2调整偏振方向为水平和竖直方向。
[0032]
四个声光移频器采用同源dds声光移频器;所述的四个声光移频器移频后的衍射光束同取 1级或
‑
1级;所述的四个声光移频器中第二声光移频器8与第三声光移频器14移频频率相同,第一声光移频器6、第二声光移频器8与第四声光移频器17的移频频率各不相同。
[0033]
所述的第三四分之一波片22与角锥棱镜23的放置位置应靠近第六偏振分光棱镜21,以减小测量误差;
[0034]
光路中各光学元器件位置结构紧凑,以减小空间杂散光对测量效果的影响;
[0035]
本发明的具体测量原理如下:
[0036]
如图1所示,双纵模he
‑
ne激光器1分别产生偏振态互相垂直的两纵模激光,两纵模激光先通过二分之一波片2调整偏振方向为水平和竖直方向;偏振方向调整后的光束通过第一偏振分光棱镜3分开,设水平偏振态激光频率为ν1,竖直偏振态激光频率为ν2;频率为ν1的水平偏振光通过第一四分之一波片4变成第一圆偏振光,频率为ν2的竖直偏振光通过第二四分之一波片12变成第二圆偏振光,再分别通过第二偏振分光棱镜5、第四偏振分光棱镜13形成四束偏振光,四束偏振光对应通过第一声光移频器6、第二声光移频器8、第三声光移频器14和第四声光移频器17分别形成ν1 f1、ν1 f2、ν2 f3、ν2 f4四个不同频率的偏振光,其中,f1=87mhz,f2=88mhz,f3=87mhz,f4=88.01mhz。
[0037]
第二声光移频器8产生的偏振光经第二反射镜9反射后与第一声光移频器6产生的偏振光在第三偏振分光棱镜10合光;第四声光移频器17产生的偏振光经第五反射镜18反射后与第三声光移频器14产生的偏振光在第五偏振分光棱镜15合光;从第三偏振分光棱镜10合光输出的光束在第二非偏振分光棱镜30分为第一透射光束和第一反射光束;
[0038]
第一反射光束经第七偏振分光棱镜31后分为第一水平偏振光和第一竖直偏振光;第一竖直偏振光ν1 f2依次经过第八反射镜32、跟踪反射镜33入射到目标靶镜34,经目标靶镜34反射后的反射光再次经过跟踪反射镜33、第八反射镜32入射到第十一反射镜39,经第十一反射镜39反射的反射光进入第三非偏振分光棱镜40分为第二透射光束和第二反射光束;第二透射光束与经第九反射镜35反射后的第一水平偏振光ν1 f1在第八偏振分光棱镜36合光,第八偏振分光棱镜36输出的合光光束经第三偏振片37干涉后形成干涉测量信号进入
第三光电探测器38,本实例中所有光电探测器带宽选为200mhz,则探测到的光强信号为:
[0039]
i(t)=i0 |a1||a2|cos(2π(f1‑
f2 f
d
)t)
[0040]
其中a1、a2为信号振幅(mv);i0为直流信号;t为时刻;f
d
为多普勒频移。
[0041]
第二反射光束进入位置探测器41,经位置探测单元电路根据探测光敏面上光斑偏移量与绝对距离测量量解耦目标靶镜34的空间偏移量。
[0042]
第一透射光束经第六反射镜19反射后与从第五偏振分光棱镜15合光输出的光束在非偏振分光棱镜20中合成具有四个频率的第三透射光束和第三反射光束,第三透射光束经过第一偏振片26干涉后进入第一光电探测器27作为参考光,探测到的光强信号为:
[0043][0044]
其中a1、a2、a3、a4为四路信号的振幅(mv);z为参考臂长度(m);c为真空光速。
[0045]
第三反射光束经第六偏振分光棱镜21后分成第二水平偏振光和第二竖直偏振光,第二水平偏振光ν1 f1、ν2 f3先依次经过第四四分之一波片24、第七反射镜25、跟踪反射镜33,通过待测距离l入射到标靶镜34,经目标靶镜34反射后的反射光再次经过跟踪反射镜33、第七反射镜25、第四四分之一波片24变成竖直偏振光回到第六偏振分光棱镜21;第二竖直偏振光ν1 f2、ν2 f4经过第三四分之一波片22入射到角锥棱镜23经角锥棱镜23反射后的反射光再次通过第三四分之一波片22后以透射形式回到第六偏振分光棱镜21,并与第六偏振分光棱镜21中的另一束光束合成一束光后经第二偏振片28干涉后形成绝对距离测量信号进入第二光电探测器29,探测到的光强信号为:
[0046][0047]
其中l为待测绝对距离,z为参考臂长度(m)。
[0048]
第一光电探测器27输出的参考信号和第二光电探测器29输出的测量信号同步输入图2所示绝对距离测量单元,多频混合信号经下变频处理后将信号输入给多频信号分离单元进行滤波处理,滤波处理后经过信号整形单元将信号变成方波信号,所述方波信号经数字鉴相单元完成相位测量。数字鉴相单元先得到粗测相位差ε
s
‑1、精测相位差ε
s
,再根据公式解算精测相位信号的整数部分,其中λ
s
‑1、λ
s
分别为粗、精测尺波长,本实例中粗测尺波长λ
s
‑1=300m,精测尺波长最后由公式l=(m
s
ε
s
)λ
s
/2求解出绝对距离l。
[0049]
多频混合的参考信号经混频、分频处理后的信号一部分作为相对位移参考信号,与第三光电探测器38输出的相对位移测量干涉信号,根据迈克尔逊干涉原理求解相位差
由公式得到目标靶镜34的位移量,其中λ为双纵模激光器1的真空波长。
[0050]
以上对本发明所提出的一种基于单光源多频混合外差式激光跟踪仪系统进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。