1.本发明涉及偏振系统优化方法领域,具体是一种基于液晶相位延迟器的偏振组件穆勒矩阵优化方法。
背景技术:
2.液晶相位延迟器(lcvr)是利用液晶的光电双折射特性制成的光偏振态调制器件,通过调节对液晶相位延迟器施加的驱动电压,便可以对入射光的相位延迟进行连续调节,通常可以将其视为相位延迟不同的一系列晶体波片。液晶相位延迟器具有宽的通光范围、无需机械传动、功耗低、响应速度快等优势,在显示、光信息和偏振成像等技术领域得到广泛应用。
3.一维矢量(s0,s1,s2,s3)
t
被称作斯托克斯(stokes)矢量,用来描述光的偏振态。当一束光照射在物体上时,物体的出射光的斯托克斯矢量与入射光的斯托克斯矢量之间的变换关系称为穆勒(mueller)矩阵。
4.由两片液晶相位延迟器和一片线偏振片构成的偏振组件可以与照明光源结合成偏振态发生器(psg),也可以与检测光强的探测器相结合构成偏振态探测器(psa),psg和psa是斯托克斯偏振仪、穆勒偏振仪等偏振仪器的关键部件,其性能会对偏振仪器的测量精度产生直接影响。
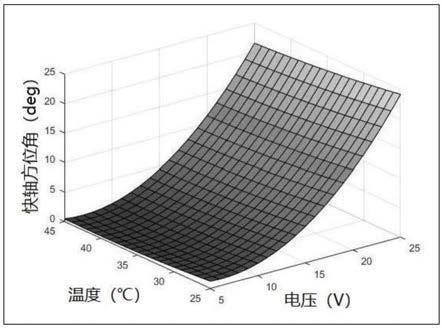
5.液晶相位延迟器的快轴在温度和电压影响下会发生偏转,如图1、图2所示,图1中a为温度发生变化后的快轴方位角,b为温度发生变化前的快轴方位角;图2为快轴方位角关于温度和电压的对应关系,当改变温度或电压时快轴方位角会发生变化。现有文献中尚未见到温度对液晶相位延迟器快轴方位角影响的相关研究,更未见到温度和电压对快轴方位角的共同影响的研究。不考虑温度对快轴方位角的影响会导致液晶相位延迟器的穆勒矩阵理论模型与实际的穆勒矩阵不相同,使得在进行偏振光研究时引入误差。
技术实现要素:
6.本发明的目的是提供一种基于液晶相位延迟器的偏振组件穆勒矩阵优化方法,以解决现有技术中由于未研究液晶相位延迟器快轴方位角随温度和电压的变化,导致由两片液晶相位延迟器和一片偏振片构成的偏振组件的穆勒矩阵偏离理论值而产生误差的问题。
7.为了达到上述目的,本发明所采用的技术方案为:
8.一种基于液晶相位延迟器的偏振组件穆勒矩阵优化方法,在所述偏振组件的穆勒矩阵中,引入随温度变化的快轴方位角,由此得到所述偏振组件优化的穆勒矩阵,包括以下步骤:
9.步骤1、测量不同温度不同电压情况下两片液晶相位延迟器的快轴方位角,根据测量结果拟合成每片液晶相位延迟器快轴方位角关于温度和电压的对应关系θ(t,u),其中θ表示每片液晶相位延迟器快轴方位角,t表示每片液晶相位延迟器温度,u表示每片液晶相位延迟器驱动电压;
10.步骤2、基于已经标定好的快轴方位角,测量不同温度不同电压情况下两片液晶相位延迟器的相位延迟,将测量数据拟合成每片液晶相位延迟器相位延迟关于温度和电压的对应关系δ(t,u),其中δ表示每片液晶相位延迟器的相位延迟
11.步骤3、将每片液晶相位延迟器已经标定好的快轴方位角关于温度和电压的对应关系θ(t,u)和相位延迟关于温度和电压的对应关系δ(t,u)带入穆勒矩阵理论模型m(θ,δ)中,得到对应片液晶相位延迟器改写后的穆勒矩阵m(t,u)如公式(1)所示:
12.m(t,u)=m(θ(t,u),δ(t,u))(1);
13.步骤4、根据偏振态发生器psg和偏振态探测器psa各自入射光、出射光的斯托克斯矢量关系,分别有以下公式:
14.s
out
=m
i
(t,u1)
×
m2(t,u2)
×
m
p
×
s
in
=m
psg
(t,u1,u2)
×
s
in
(2),
15.s
out
=m
p
×
m2(t,u2)
×
m1(t,u1)
×
s
in
=m
psa
(t,u1,u2)
×
s
in
(3),
16.公式(2)、(3)中,m1和m2分别为两片液晶相位延迟器的穆勒矩阵,u1和u2分别为两片液晶相位延迟器的驱动电压,m
p
是构成偏振组件的线偏振片的穆勒矩阵,m
psg
和m
psa
分别是偏振态发生器psg和偏振态探测器psa整体的穆勒矩阵,s
in
和s
ou
t分别是入射光和出射光的斯托克斯矢量;
17.在公式(2)和公式(3)中,若温度t确定,对于偏振态发生器psg的任意一组电压组合(u1,u2),psg会产生一个特定偏振态的光束,如果用这束光照射到具有相同电压组合(u1,u2)的偏振态探测器psa上,检测到的光强将会是最大的。除去偏振态发生器psg的光源部分和偏振态探测器psa的光强探测器部分,其余的组件拥有完全相同的结构,即所要优化的偏振组件。可用穆勒矩阵m
g
(t,u1,u2)来描述这个偏振组件,如公式(4)所示:
18.s
out
=m2(t,u2)
×
m1(t,u1)
×
m
p
×
s
in
=m
g
(t,u1,u2)
×
s
in
(4),
19.其中,出射光s
out
的第一个分量s
out0
代表亮度,第一个分量s
out
是入射光s
in
的线性函数,如公式(5)所示:
20.s
out0
=αs
in0
βs
in1
γs
in2
εs
in3
(5),
21.公式(5)中,α、β、γ、ε是矩阵m
g
(t,u1,u2)第一行的阵元m
11
(t,u1,u2)、m
12
(t,u1,u2)、m
13
(t,u1,u2)、m
14
(t,u1,u2),s
in0
、s
in1
、s
in2
、s
in3
是入射光s
in
的四个斯托克斯分量;
22.对于公式(4),若温度t已知,使用不同的电压组合可以获得不同的m
g
矩阵。对于给定的入射光s
in
,假设有4个暂时未知的电压组合(u
11
,u
12
)、(u
21
,u
22
)、(u
31
,u
32
)、(u
41
,u
42
),则有4个穆勒矩阵m
g1
(t,u
11
,u
12
)、m
g2
(t,u
21
,u
22
)、m
g3
(t,u
31
,u
32
)、m
g4
(t,u
41
,u
42
),结合公式(5)建立一个线性方程组如公式(6)所示:
[0023][0024]
公式(6)中,α1、β1、γ1、ε1是矩阵m
g1
(t,u
11
,u
12
)第一行的阵元,α2、β2、γ2、ε2是矩阵m
g2
(t,u
21
,u
22
)第一行的阵元,α3、β3、γ3、ε3是矩阵m
g3
(t,u
31
,u
32
)第一行的阵元,α4、β4、γ4、ε4是矩阵m
g4
(t,u
41
,u
42
)第一行的阵元,i1、i2、i3、i4代表亮度,i1等于α1s
in0
β1s
in1
γ1s
in2
ε1s
in3
,i2等于α2s
in0
β2s
in1
γ2s
in2
ε2s
in3
,i3等于α3s
in0
β3s
in1
γ3s
in2
ε3s
in3
,i4等于α4s
in0
β
4
s
in1
γ4s
in
ε4s
in
,矩阵m
l
是i是
[0025]
对于公式(6)所示线性方程组,使用矩阵m
l
的条件数来表征s
in
对于其亮度i的误差和不确定度的敏感性,矩阵m
l
的条件数cn(m
l
)定义为矩阵m
l
最大奇异值与最小奇异值的比值,如公式(7)所示:
[0026][0027]
公式(7)中,σ
max
和σ
min
分别是矩阵m
l
不为零的最大奇异值和最小奇异值,矩阵m
l
的条件数越小,说明入射光s
in
对于亮度i的误差或不确定度越不敏感;
[0028]
步骤5、计算得到矩阵m
l
的条件数达到理论最小值时两片液晶相位延迟器的驱动电压(u
11
,u
12
)、(u
21
,u
22
)、(u
31
,u
32
)、(u
41
,u
42
),将计算得到的驱动电压代入用于描述偏振组件的穆勒矩阵m
g
(t,u1,u2),得到优化的穆勒矩阵m
g1
(t,u
11
,u
12
)、m
g2
(t,u
21
,u
22
)、m
g3
(t,u
31
,u
32
)、m
g4
(t,u
41
,u
42
),过程如下:
[0029]
矩阵ml的条件数所能达到的理论最小值为当且仅当4个斯托克斯矢量(α1,β1,γ1,ε1)
t
、(α2,β2,γ2,ε2)
t
、(α3,β3,γ3,ε3)
t
、(α4,β4,γ4,ε4)
t
经过归一化后在邦加球上对应的4个点围成的四面体为正四面体时成立;
[0030]
为了使矩阵m
l
的条件数达到最小,在邦加球上任意取一个内接的正四面体,计算出正四面体的4个顶点为d1(s
11
,s
12
,s
13
)、d2(s
21
,s
22
,s
23
)、d3(s
31
,s
32
,s
33
)、d4(s
41
,s
42
,s
43
);令矩阵等于此时矩阵m
l
的条件数可以达到理论上的最小值
[0031]
如前所述α1、β1、γ1、ε1是矩阵m
g1
(t,u
11
,u
12
)第一行的阵元,同时m
g1
(t,u
11
,u
12
)第一行的阵元还可以表示为m
111
(u
11
,u
12
)、m
112
(u
11
,u
12
)、m
113
(u
11
,u
12
)、m
114
(u
11
,u
12
)。令α1=m
111
(u
11
,u
12
)、β1=m
112
(u
11
,u
12
)、γ1=m
113
(u
11
,u
12
)、ε1=m
114
(u
11
,u
12
),可以计算出对应的未知电压(u
11
,u
12
)。同理可以计算出(u
21
,u
22
)、(u
31
,u
32
)和(u
41
,u
42
)。
[0032]
将计算得到的驱动电压(u
11
,u
12
)、(u
21
,u
22
)、(u
31
,u
32
)、(u
41
,u
42
)代入所述穆勒矩阵m
g
(t,u1,u2),得到优化的穆勒矩阵m
g1
(t,u
11
,u
12
)、m
g2
(t,u
21
,u
22
)、m
g3
(t,u
31
,u
32
)、m
g4
(t,u
41
,u
42
)。
[0033]
本发明考虑了温度和电压对液晶相位延迟器快轴方位角的共同影响,优化了由两片液晶相位延迟器和一片偏振片构成的偏振组件的穆勒矩阵理论模型,消除了因未考虑快轴方位角随温度和电压变化而产生的误差,提高了偏振组件整体穆勒矩阵的精度。
附图说明
[0034]
图1为液晶相位延迟器快轴方位角偏转示意图。
[0035]
图2为快轴方位角随温度和电压变化示意图。
[0036]
图3为相位延迟随温度和电压变化示意图。
[0037]
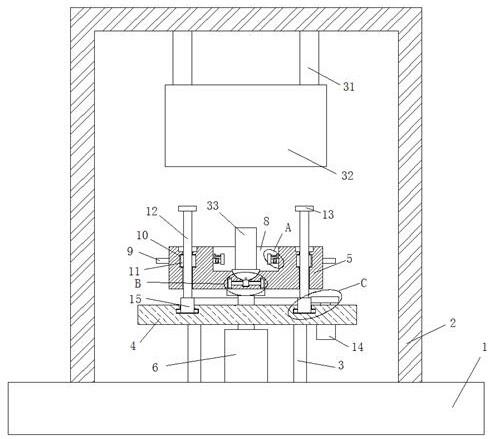
图4为偏振态发生器psg和偏振态探测器psa的结构示意图。
具体实施方式
[0038]
以下结合附图和实例对本发明的具体实施方式做进一步详细说明:
[0039]
如图4所示,图4中(a)为psg的光路原理图,其中两片液晶相位延迟片1、2和一片线偏振片3组成偏振组件,再与光源4配合构成psg。图4中(b)为psa的光路原理图,其中两片液晶相位延迟片1、2和一片线偏振片3组成偏振组件,再与光强探测器5配合构成psa。本实施例以偏振态发生器psg为例进行说明,偏振态探测器psa的分析方法类似。
[0040]
在本实施例中,第一片液晶相位延迟器1的初始快轴方位角与垂直方向成45
°
,第二片液晶相位延迟器2的初始快轴方位角与垂直方向成22.5
°
,线偏振片3的偏振方向为垂直方向。
[0041]
首先使用消光法测量温度和电压与两片液晶相位延迟器1、2的快轴方位角的对应关系。将液晶相位延迟器放置在两片偏振方向相互垂直的线偏振片中间,旋转液晶相位延迟器找到消光位置,记录下液晶相位延迟器的快轴方位角,将测量数据拟合成快轴方位角关于温度和电压的对应关系θ1(t,u1)和θ2(t,u2)。图2为快轴方位角关于温度和电压的对应关系示意图。图中x轴为电压,y轴为温度,z轴为快轴方位角。
[0042]
基于已经标定好的快轴方位角与温度和电压的对应关系,用亮度法测量温度和电压与两片液晶相位延迟器1、2的相位延迟的对应关系。在某温度t
a
和电压u
a
时,将液晶相位延迟器旋转到与θ
a
(t
a
,u
a
)成45
°
角的位置,旋转第二片线偏振片并记录偏振片后光束的亮度,计算并且记录为此时(温度为t
a
,电压为u
a
)的相位延迟。将测量数据拟合成相位延迟关于温度和电压的对应关系δ1(t,u1)和δ2(t,u2)。图3为相位延迟关于温度和电压的对应关系示意图。图中x轴为电压,y轴为温度,z轴为相位延迟。
[0043]
根据两片液晶相位延迟器已经标定好的快轴方位角关于温度和电压的对应关系和相位延迟关于温度和电压的对应关系,它们的穆勒矩阵分别可以改写为m1(t,u1)=m1(θ1(t,u1),δ1(t,u1))和m2(t,u2)=m2(θ2(t,u2),δ2(t,u2))。
[0044]
在环境温度t已知的情况下,入射光进入偏振组件之后的方程为:
[0045]
s
out
=m2(u2)
×
m1(u1)
×
m
p
×
s
in
=m
g
(u1,u2)
×
s
in
(1),
[0046]
式中m
p
是构成偏振组件的线偏振片,m1和m2分别为两片液晶相位延迟器的穆勒矩阵,u1和u2分别为两片液晶相位延迟器的驱动电压,出射光斯托克斯矢量s
out
的第一个分量s
out
代表亮度,它是入射光s
in
的线性函数,公式为:
[0047]
s
out0
=αs
in0
βs
in1
γs
in2
εs
in3
(2),
[0048]
式中α、β、γ、ε是矩阵m
g
(u1,u2)第一行的阵元m
11
(u1,u2),m
12
(u1,u2),m
13
(u1,u2),m
14
(u1,u2),s
in0
、s
in1
、s
in2
、s
in3
是入射光s
in
的四个斯托克斯分量。
[0049]
对于给定的入射光s
in
,通过使用多组电压组合,可建立一个线性方程组。以4组电压为例,线性方程组可表示为:
[0050][0051]
公式(3)中,α1、β1、γ1、ε1是矩阵m
g1
(t,u
11
,u
12
)第一行的阵元,α2、β2、γ2、ε2是矩阵m
g2
(t,u
21
,u
22
)第一行的阵元,α3、β3、γ3、ε3是矩阵m
g3
(t,u
31
,u
32
)第一行的阵元,α4、β4、γ4、ε4是矩阵m
g4
(t,u
41
,u
42
)第一行的阵元,i1、i2、i3、i4代表亮度,i1等于α1s
in0
β1s
in1
γ1s
in2
ε1s
in3
,i2等于α2s
in0
β2s
in1
γ2s
in2
ε2s
in3
,i3等于α3s
in0
β3s
in1
γ3s
in2
ε3s
in3
,i4等于α4s
in0
β4s
in1
γ4s
in2
ε4s
in3
,矩阵m
l
是i是
[0052]
为了使矩阵m
l
的条件数达到最小,在邦加球上任意取一个内接的正四面体,其4个顶点分别为d1(0.5776,0.5776,
‑
0.5776)、d2(
‑
0.5776,0.5776,0.5776)、d3(
‑
0.5776,
‑
0.5776,
‑
0.5776)和d4(0.5776,
‑
0.5776,0.5776)。由4个顶点的坐标可以得到矩阵m
l
为:
[0053][0054]
如前所述α1、β1、γ1、ε1是矩阵m
g1
(u
11
,u
12
)第一行的阵元,同时m
g1
(u
11
,u
12
)第一行的阵元还可以表示为m
111
(u
11
,u
12
)、m
112
(u
11
,u
12
)、m
113
(u
11
,u
12
)、m
114
(u
11
,u
12
)。令α1=0.5=m
111
(u
11
,u
12
)、β1=0.2887=m
112
(u
11
,u
12
)、γ1=0.2887=m
113
(u
11
,u
12
)、ε1=
‑
0.2887=m
114
(u
11
,u
12
),可以计算出对应的未知电压(u
11
,u
12
)。同理可以计算出(u
21
,u
22
)、(u
31
,u
32
)和(u
41
,u
42
)。
[0055]
m
g1
(t,u
11
,u
12
)、m
g2
(t,u
21
,u
22
)、m
g3
(t,u
31
,u
32
)、m
g4
(t,u
41
,u
42
)即为偏振组件修正的穆勒矩阵。
[0056]
本发明考虑了温度和电压对液晶相位延迟器快轴方位角的共同影响,优化了由两片液晶相位延迟器和一片偏振片构成的偏振组件的穆勒矩阵理论模型,消除了因未考虑快轴方位角随温度和电压变化而产生的误差,提高了偏振组件整体穆勒矩阵的精度。
[0057]
以上所述的具体实施方式仅用以对本发明的目的和技术方案进行进一步的详细说明,不用于限定本发明的保护范围。对本发明的具体实施方案进行修改或者对部分技术特征进行等同替换而不脱离本发明方案的精神,均应涵盖在本发明请求保护的技术方案范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。