1.本发明属于图像视觉距离估计技术领域,具体涉及一种基于近红外三光谱成像的建筑物相对距离估计方法。
背景技术:
2.距离感知技术被广泛应用于国防与民用等领域,例如基于距离测量技术的自动壁障、无人驾驶以及机械臂抓取目标物等。目前,根据光源类型,距离感知主要有两类。第一,是基于主动光的距离感知方法,比如基于三角测距以及飞行时间(tof)的方法,这种基于主动光的距离感知方法需要提供光源作为信号源,易受噪声等外界条件的干扰,对所测目标表面材质有一定的要求,性能较差;第二,是基于非主动光的距离感知技术,例如基于双目视觉的距离感知方法,但是该类方法同样容易受目标表面纹理的影响。
3.现有的分段式距离补偿方法用待补偿的测距传感器测试若干个标定点处的距离,得到实际距离与测试距离,将测试距离与实际距离的差值为偏差值,绘制若干个点的坐标分布图;依次连接若干个点获得曲线,根据曲线变化趋势分为若干段,每段的曲线接近线性;上位机依次采集测距传感器在各补偿点位置的测试距离,计算偏差值,生成各补偿点位置的补偿命令,并下发至测距传感器;测距传感器接收到补偿命令后,提取出距离信息,针对每段进行线性补偿公式计算;对测距传感器进行分段距离补偿。该方法存在的不足之处是:由于该方法依托于测距传感器,但传感器信号在远距离测量中不稳定,该方法测得距离在2.5km内估计误差约7%,因此该方法并不适用于较远距离估计。
4.现有的基于双光谱消光的建筑物相对距离估计方法,采用同一近红外单色相机获取城市建筑物场景的905nm和980nm图像,利用消光系数与波长的关系建立原始距离估计模型,直接代入905nm和980nm两个窄波段的成像数据即可得到原始距离估计信息。该方法存在的不足之处是:建立的原始距离估计模型假设了同一种材料在905nm和980nm波段处的反射率相等,但是对于部分金属材料,其假设并不成立;并且波长选择被限制为两个特定的近红外波长,而不能使用其他波长进行成像估计距离,估计结果也存在一定的误差,大约10%左右。
技术实现要素:
5.本发明针对现有技术中的不足,提出一种基于近红外三光谱成像的建筑物相对距离估计方法,首先测量雾天下太阳光的光谱,并从中选定三个近红外波段;然后采用同一近红外相机和三个近红外成像波段对应的滤光片在雾天下对选定建筑物目标进行成像得到同一场景下不同波段成像的三幅近红外图像;再分别确定三幅近红外图像的全局大气光值和消光系数;根据三幅近红外图像及其对应的全局大气光值和消光系数推导建筑物相对距离估计公式;最后利用所推导的距离估计公式对建筑物相对距离进行估计。
6.为实现上述目的,本发明采用以下技术方案:一种基于近红外三光谱成像的建筑物相对距离估计方法,包括如下步骤:
7.步骤一、利用标准白色目标和光谱仪测量雾天下太阳光的光谱;
8.步骤二、利用测量得到的雾天下太阳光的光谱,选定具有较大辐射强度的三个近红外成像波段;
9.步骤三、利用近红外相机和三个近红外成像波段对应的滤光片在雾天下对选定建筑物目标进行成像,得到同一场景下不同波段成像的三幅近红外图像;
10.步骤四、利用同一场景下不同波段成像的三幅近红外图像分别估计同一场景下不同波段的每幅图像全局大气光值;
11.步骤五、利用天气预报软件获得成像时刻的能见度;
12.步骤六、利用经验公式建立三个波段下大气消光系数与能见度和波长的关系;
13.步骤七、利用同一场景下不同波段成像的三幅近红外图像、同一场景下不同波段每幅图像全局大气光值、成像时刻的能见度和三个波段下大气消光系数与能见度和波长的关系推导基于近红外三光谱成像的建筑物相对距离估计公式;
14.步骤八、利用基于近红外三光谱成像的建筑物相对距离估计公式估计建筑物相对距离。
15.为优化上述技术方案,采取的具体措施还包括:
16.进一步地,步骤一包括以下步骤:
17.s101、选择能够测量近红外波段光谱的光谱仪;
18.s102、利用反射率接近为1的标准白色目标和光谱仪搭建光谱测量系统;
19.s103、在白天近红外相机放置处,利用光谱测量系统测量雾天下太阳光的光谱。
20.进一步地,步骤二包括以下步骤:
21.s201、观察测量得到的雾天下太阳光的光谱;
22.s202、将辐射强度大于0.3的近红外波段作为选定的三个近红外成像波段;
23.s203、将选定的三个近红外成像波段记作λ1、λ2和λ3。
24.进一步地,步骤三包括以下步骤:
25.s301、选定三个近红外成像波段对应的滤光片;
26.s302、利用近红外相机和三个近红外成像波段对应的滤光片,根据以下公式
[0027][0028][0029][0030]
在雾天下对选定建筑物目标进行成像得到同一场景下不同波段成像的三幅近红外图像;
[0031]
其中,i(λ1,d)、i(λ2,d)和i(λ3,d)分别表示同一场景下不同波段成像的三幅近红外图像,s(λ1)、s(λ2)和s(λ3)表示不同波段下材料的反射率,a(λ1)、a(λ2)和a(λ3)表示同一场景下不同波段每幅图像全局大气光值,β(λ1)、β(λ2)和β(λ3)表示三个波段下大气消光系数,d表示建筑物目标与近红外相机的真实距离。
[0032]
进一步地,步骤四包括以下步骤:
[0033]
s401、手动在同一场景下不同波段成像的三幅近红外图像中分别截取每幅图像中较远处的天空区域;
[0034]
s402、将每幅图像中较远处的天空区域的最大灰度值分别作为每幅图像全局大气光值,即a(λ1)、a(λ2)和a(λ3)。
[0035]
进一步地,步骤六包括以下步骤:s601、当成像时刻的能见度小于6km时,根据以下公
[0036]
式
[0037][0038][0039][0040]
建立三个波段下大气消光系数与能见度和波长的关系;
[0041]
s602、当成像时刻的能见度大于等于6km小于10km时,根据公式
[0042][0043][0044][0045]
建立三个波段下大气消光系数与能见度和波长的关系。
[0046]
进一步地,近红外三光谱成像的建筑物相对距离d估计公式如下:
[0047][0048]
其中ρ1和ρ2均为常数。
[0049]
进一步地,步骤七包括以下步骤:s701、当λ1、λ2和λ3较接近,反射率近似成线性关系,根据反射率插值公式
[0050]
s(λ3)=ρ1s(λ1) ρ2s(λ2)
ꢀꢀ
(10)
[0051]
根据公式
[0052][0053][0054]
s702、将公式(10)代入公式(3)可得
[0055][0056]
s703、用公式(1)除以公式(2),可得反射率比值
[0057][0058]
s704、用公式(13)除以公式(2)可得
[0059][0060]
s705、将公式(14)代入公式(15)可得近红外三光谱成像的建筑物相对距离估计公式。
[0061]
本发明的有益效果是:第一,由于本发明利用步骤一和步骤二,选择了辐射较强的近红外波段,所以本发明所提建筑物相对距离估计方法能够探测较远的距离,同时由于本发明使用三个近红外波段进行成像,并通过步骤七的公式推导消去了材料反射率对距离估计的影响,因此本发明所提基于近红外三光谱成像的建筑物相对距离估计方法能够适应目标表面复杂的纹理,进而提高了距离估计的准确率,克服了现有技术不适用于较远距离估计且误差较大的缺点。
[0062]
第二,由于本发明利用步骤七的公式推导消去了材料反射率对建筑物相对距离估计的影响,所以距离估计公式是直等,使距离估计的更准确,同时由于本发明采用步骤一和二的光谱测量及选择方法,拓宽了距离估计可使用的波段范围,克服了现有技术需要进行同一种材料在905nm和980nm波段处的反射率相等的假设,可用波长选择范围小,以及估计距离估计误差大的缺点。
附图说明
[0063]
图1为本发明的建筑物相对距离估计方法流程图。
[0064]
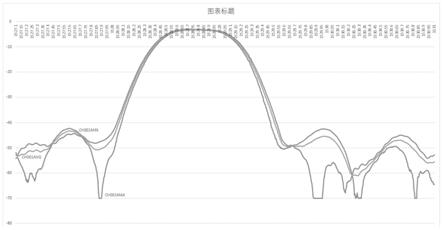
图2为本发明测量的雾天下太阳光的光谱示意图。
[0065]
图3为本发明波长为880nm的近红外图像。
[0066]
图4为本发明波长为905nm的近红外图像。
[0067]
图5为本发明波长为980nm的近红外图像。
[0068]
图6为本发明建筑物相对距离估计结果。
具体实施方式
[0069]
现在结合附图对本发明作进一步详细的说明。
[0070]
需要注意的是,发明中所引用的如“上”、“下”、“左”、“右”、“前”、“后”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0071]
如附图所示,本发明实施例提供一种基于近红外三光谱成像的建筑物相对距离估计方法;
[0072]
具体通过以下步骤实现:
[0073]
步骤1:利用标准白色目标和光谱仪测量雾天下太阳光的光谱。
[0074]
具体通过以下步骤实现:
[0075]
步骤101,选择能够测量近红外波段光谱的光谱仪;
[0076]
具体地,所使用的光谱仪为pmax12光子多通道分析仪c10027
‑
01,工作的波长范围在200nm至950nm和pma
‑
12近红外光纤光谱仪c10028
‑
01,工作的波长范围在900nm至2350nm,两台光谱仪能够测量材料在可见光到近红外波段的反射率光谱。
[0077]
步骤102,利用反射率接近为1的标准白色目标和光谱仪搭建光谱测量系统;
[0078]
步骤103,在白天近红外相机放置处,利用光谱测量系统测量雾天下太阳光的光谱。
[0079]
步骤2:利用测量得到的雾天下太阳光的光谱选定三个近红外成像波段。
[0080]
具体通过以下步骤实现:
[0081]
步骤201,观察测量得到的雾天下太阳光的光谱;
[0082]
具体地,如图2所示,为本发明测量的雾天下太阳光的光谱示意图。从图2中,可以看出在950nm左右存在一个吸收带,在此左右波长的辐射强度相对较低,这是由于大气中的水蒸气、二氧化碳和臭氧对950nm左右光吸收造成的,所以950nm左右的光不适合作为成像波段。
[0083]
步骤202,将具有较大辐射强度的近红外波段作为选定三个近红外成像波段;
[0084]
具体地,根据光的散射规律,当大气中的悬浮颗粒粒子直径与光的波长相近时,光会绕过粒子继续向前传播,所以近红外光在雾天或者霾天下,其穿透性要优于可见光,因此选择近红外光作为城乡波段要优于可见光波段,同时根据步骤201的观察结果,可以选择的波段范围近似为880nm~920nm和970nm~1000nm,从可以选择的波段范围内选择三个波段作为成像波段即可,本发明中选择的三个波段分别为880nm、905nm和980nm。
[0085]
步骤203,将选定三个近红外成像波段记作λ1、λ2和λ3。
[0086]
具体地,λ1=880nm,λ2=905nm,λ3=980nm。
[0087]
步骤3:利用近红外相机和三个近红外成像波段对应的滤光片在雾天下对选定建筑物目标进行成像得到同一场景下不同波段成像的三幅近红外图像;
[0088]
具体通过以下步骤实现:
[0089]
步骤301,选定三个近红外成像波段对应的滤光片;
[0090]
具体地,所选近红外成像波段λ1=880nm,λ2=905nm,λ3=980nm,对应的滤光片分别为中心波长为880nm,带宽为10nm的窄带滤光片;中心波长为905nm,带宽为10nm的窄带滤光片;中心波长为980nm,带宽为10nm的窄带滤光片。
[0091]
步骤302,利用近红外相机和三个近红外成像波段对应的滤光片,根据公式
[0092][0093][0094][0095]
在雾天下对选定建筑物目标进行成像得到同一场景下不同波段成像的三幅近红外图像;
[0096]
其中,i(λ1,d)、i(λ2,d)和i(λ3,d)表示同一场景下不同波段成像的三幅近红外图像,s(λ1)、s(λ2)和s(λ3)表示不同波段下材料的反射率,a(λ1)、a(λ2)和a(λ3)表示同一场景下不同波段每幅图像全局大气光值,β(λ1)、β(λ2)和β(λ3)表示三个波段下大气消光系数,d表示建筑物目标与近红外相机的真实距离。
[0097]
具体地,近红外相机的工作波段范围应包括700nm至1000nm,本发明使用的相机型号为gs3
‑
u3
‑
41c6nir
‑
c,将880nm滤光片、905nm滤光片和980nm滤光片置于近红外相机镜头前对选定建筑物目标进行成像得到对应波段成像的近红外图像。近红外相机固定不动,手
动替换880nm滤光片、905nm滤光片和980nm滤光片,大概需要三分钟的时间可以完成图像数据采集,不是实时成像的光学系统。如图3所示,为本发明波长为880nm的近红外图像,即i(λ1,d)。如图4所示,为本发明波长为905nm的近红外图像,即i(λ2,d)。如图5所示,为本发明波长为980nm的近红外图像,即i(λ3,d)。
[0098]
步骤4:利用同一场景下不同波段成像的三幅近红外图像分别估计同一场景下不同波段每幅图像全局大气光值;
[0099]
具体通过以下步骤实现:
[0100]
步骤401,手动在同一场景下不同波段成像的三幅近红外图像中分别截取每幅图像中较远处的天空区域;
[0101]
具体地,用matlab软件对获得的近红外图像进行处理,在每幅图像较远处天空区域截取10
×
10像素大小的图像块。
[0102]
步骤402,将每幅图像中较远处的天空区域的最大灰度值作为同一场景下不同波段每幅图像全局大气光值,即a(λ1)、a(λ2)和a(λ3)。
[0103]
具体地,将每幅图像中较远处天空区域截取的10
×
10像素大小的图像块中的最大灰度值作为对应近红外图像的全局大气光值,即可求得a(λ1)、a(λ2)和a(λ3)。
[0104]
步骤5:利用天气预报软件获得成像时刻的能见度;
[0105]
具体地,本发明使用中央气象台www.nmc.cn发布的各地实时能见度,网站每小时更新一次各地能见度,本发明实施中获得的能见度为3.2km。
[0106]
步骤6:利用经验公式建立三个波段下大气消光系数与能见度和波长的关系;
[0107]
具体通过以下步骤实现:
[0108]
步骤601,当成像时刻的能见度小于6km时,根据公式
[0109][0110][0111][0112]
建立三个波段下大气消光系数与能见度和波长的关系;
[0113]
步骤602,当成像时刻的能见度大于等于6km小于10km时,根据公式
[0114][0115][0116][0117]
建立三个波段下大气消光系数与能见度和波长的关系。
[0118]
具体地,当能见度小于6km,将波长和能见度同时代入公式(4)到(6),得到对应的大气消光系数。当能见度大于等于6km小于10km,将波长和能见度代入公式(7)至(9),得到对应的大气消光系数。本发明实施中能见度值为3.2km,所以利用公式(4)到(6)计算三个波长880nm、905nm和980nm下的消光系数。
[0119]
步骤7:利用同一场景下不同波段成像的三幅近红外图像、同一场景下不同波段每幅图像全局大气光值、成像时刻的能见度和三个波段下大气消光系数与能见度和波长的关系推导基于近红外三光谱成像的建筑物相对距离估计公式;
[0120]
具体通过以下步骤实现:
[0121]
步骤701,当λ1、λ2和λ3较接近,反射率近似成线性关系,根据反射率插值公式
[0122]
s(λ3)=ρ1s(λ1) ρ2s(λ2)
ꢀꢀꢀꢀꢀ
(10)
[0123]
其中ρ1和ρ2均为常数,根据公式
[0124][0125][0126]
步骤702,将公式(10)代入公式(3)可得
[0127][0128]
步骤703,用公式(1)除以公式(2),可得反射率比值
[0129][0130]
步骤704,用公式(13)除以公式(2)可得
[0131][0132]
步骤705,将公式(14)代入公式(15)可得近红外三光谱成像的建筑物相对距离估计公式为
[0133][0134]
步骤8:利用基于近红外三光谱成像的建筑物相对距离估计公式估计建筑物相对距离。
[0135]
具体地,当获得三幅近红外图像后,i(λ1,d)、i(λ2,d)和i(λ3,d)均为已知;a(λ1)、a(λ2)和a(λ3)亦可根据步骤402求得;当三个波段确定后,ρ1和ρ2均为常数,其值可根据步骤701计算;β(λ1)、β(λ2)和β(λ3)可利用步骤六的公式进行计算。公式(16)中只有d为未知数。利用公式(16)对场景图像中建筑物的逐个像素点进行计算得到相对距离的估计值,并获得建筑物相对距离图。
[0136]
如图6所示,为本发明建筑物相对距离估计结果。使用了掩膜图像令天空区域灰度值为0,掩膜图像为手动从原始图像中截取的二值图像,天空区域的灰度值均为0,建筑物区域的灰度值为1。实施例中六个建筑物的真实距离分别为5.9km,3.98km,5.78km,5.58km,5.64km和5.58km,当已知第一个建筑物的距离时,其它五个建筑物的估计距离分别如下表1所示。
[0137]
表1本发明所提相对距离估计方法的误差
[0138]
真实距离(km)5.93.985.785.585.645.85
双光谱法估计距离(km)
‑
3.645.336.056.146.39双光谱法相对误差(%)
‑
8.547.798.428.879.23三光谱法估计距离(km)
‑
3.795.435.285.896.12三光谱法相对误差(%)
‑
4.776.055.384.434.62
[0139]
如表1所示,双光谱法表示第二个对比文件所提的雾天下基于双光谱消光的城市建筑物相对距离估计方法,三光谱法表示本发明提出的基于近红外三光谱成像的建筑物相对距离估计方法。分别计算五个建筑物使用双光谱法和三光谱法的估计距离,同时计算对应的相对误差,并统计两种方法的相对误差均值。可见本发明所提三光谱距离估计方法在距离超过2.5km时候的相对误差均值约为5%,优于对比方法中的分段式距离补偿方法,同时三光谱法相对误差均值约为5%,对比方法中双光谱法的距离估计相对误差均值约为8.6%,三光谱法优于双光谱法,相对误差均值减小了约3.6%,所以本发明能够减小距离估计的误差,进而提高估计的准确率。
[0140]
本发明采用基于近红外三光谱成像的建筑物相对距离估计方法,首先测量雾天下太阳光的光谱并在从中选定三个近红外波段;然后采用同一近红外相机和三个近红外成像波段对应的滤光片在雾天下对选定建筑物目标进行成像得到同一场景下不同波段成像的三幅近红外图像;再分别确定三幅近红外图像的全局大气光值和消光系数;根据三幅近红外图像及其对应的全局大气光值和消光系数推导建筑物相对距离估计公式;最后利用所推导的距离估计公式实现对建筑物相对距离的估计,所提建筑物距离估计方法能够忽略材料表面反射率,同时对波段波长的选择限制减小,并且相对估计距离的相对误差更小。
[0141]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。