真空吸附装置、搬送机械手臂及搬送系统
【技术领域】
1.本技术涉及面版搬运领域,特别涉及一种真空吸附装置、包含所述真空吸附装置的搬送机械手臂及搬送系统。
背景技术:
2.在液晶面板行业中,通常采用搬送机械手臂负责搬送玻璃基板,然而,请参考图1,在现有的生产过程中,手臂牙叉上用于支撑玻璃基板的圆形吸盘900与玻璃基板之间的接触面积大,使得产品与圆形吸盘900的接触面上出现亮度不均的现象(mura),另外,残留在所述圆形吸盘900上的异物容易将玻璃基板之偏光板刺伤,异物会造成玻璃基板与圆形吸盘900之间出现空隙,使得真空吸附功能出现异常,从而影响了吸盘对于玻璃基板的吸附效果。
3.因此,需要开发一款新型的吸附装置以解决上述技术问题。
技术实现要素:
4.为了解决上述问题,本技术提供一种真空吸附装置,包括:底座,所述底座之上表面包括凹槽,所述凹槽内设置有第一连通孔,所述底座之侧面设置有第二连通孔,所述第一连通孔与第二连通孔相通;通气管,与所述第二连通孔相连通;密封件,设置于所述凹槽之内;基座,所述基座的周缘气密地设置在设置于所述底座之上;以及吸嘴,设置于所述基座之上;其中,所述基座与所述吸嘴共同形成腔体结构,且所述吸嘴通过所述基座与所述底座相连通。
5.更进一步地,所述腔体结构的正投影形状为矩形、椭圆形、或是多边形,所述吸嘴的材料为硅胶。
6.更进一步地,所述底座之四个角落设置有第一孔洞,所述基座之四个角落设置有第二孔洞,所述第一孔洞与所述第二孔洞的位置相对应。
7.更进一步地,所述基座具有一凸起,所述吸嘴通过所述凸起固定在所述基座之上,所述密封件为o形环。
8.为了解决上述问题,本技术还提供一种搬送机械手臂,包括:立轴;移动元件,设置于所述立轴之一侧;手臂轴,设置于所述移动元件之一侧;以及多个牙叉,与所述手臂轴相连接且与所述手臂轴往同一方向延伸,其中,每个所述牙叉之一表面设置有凹面,所述凹面内镶有真空吸附装置,所述真空吸附装置由下至上包括:底座,所述底座之上表面包括凹槽,所述凹槽内设置有第一连通孔,所述底座之侧面设置有第二连通孔,所述第一连通孔与第二连通孔相连通;通气管,与所述第二连通孔相连通;密封件,设置于所述凹槽之内;基座,所述基座的周缘气密地设置在设置于所述底座之上;以及吸嘴,设置于所述基座之上;其中,所述基座与所述吸嘴共同形成腔体结构,且所述吸嘴通过所述基座与所述底座相连通。
9.更进一步地,所述吸嘴上部之边缘高于所述基座之上表面。
10.更进一步地,所述腔体结构的正投影形状为矩形、椭圆形、或是多边形,所述吸嘴的材料为硅胶。
11.更进一步地,所述底座之四个角落设置有第一孔洞,所述基座之四个角落设置有第二孔洞,所述第一孔洞与所述第二孔洞的位置相对应。
12.更进一步地,所述基座具有一凸起,所述吸嘴通过所述凸起固定在所述基座之上,所述密封件为o形环。
13.为了解决上述问题,本技术还提供一种搬送系统,包括:
14.走行轴;固定架,设置于所述行走轴之上;旋转轴,设置于所述固定架之上;以及搬送机械手臂;其中,所述搬送机械手臂包括;立轴,通过所述旋转轴与所述固定架枢接;移动元件,设置于所述立轴之一侧;手臂轴,设置于所述移动元件之一侧;以及多个牙叉,与所述手臂轴相连接且与所述手臂轴往同一方向延伸,其中,每个所述牙叉之一表面设置有凹面,所述凹面内镶有真空吸附装置,所述真空吸附装置由下至上包括:底座,所述底座之上表面包括凹槽,所述凹槽内设置有第一连通孔,所述底座之侧面设置有第二连通孔,所述第一连通孔与第二连通孔相连通;通气管,与所述第二连通孔相连通;密封件,设置于所述凹槽之内;基座,所述基座的周缘气密地设置在设置于所述底座之上;以及吸嘴,设置于所述基座之上;其中,所述基座与所述吸嘴共同形成腔体结构,且所述吸嘴通过所述基座与所述底座相连通。
15.本技术的有益效果为:本技术所提供的真空吸附装置的上部形成正投影为矩形、椭圆形、或是多边形的腔体结构,其边缘胶质支撑部分与玻璃基板的接触面积小,因此,异物不易残留在支撑部份上而是容易沉积于腔体结构内,减少了异物与玻璃基板接触的情况,即便有异物掉落在胶质支撑部分,胶质支撑部分能够提供较好弹性以防止异物刺伤玻璃基板之偏光板的保护膜并防止真空异常,有效地解决了现有圆形吸盘造成的偏光板刺伤和吸盘mura等品质问题,降低搬送机械手的真空异常造成的宕机时间和频率,提升产品良率和产线产能。
16.为了让本技术的上述内容能更明显易懂,下文特举优选实施例,并配合所附图式,作详细说明如下。
【附图说明】
17.图1为现有圆形吸盘的结构示意图。
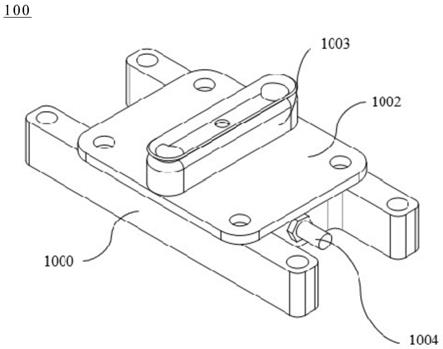
18.图2为本技术实施例所提供的真空吸附装置的结构示意图。
19.图3为本技术实施例所提供的真空吸附装置的爆炸分解图。
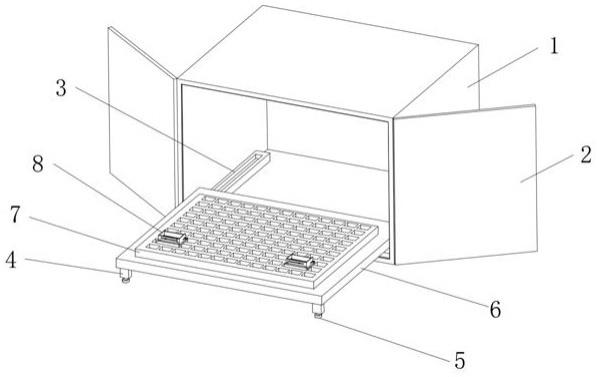
20.图4为本技术实施例所提供的搬送系统的结构示意图。
21.图5为本技术实施例所提供的搬送机械手臂之牙叉的放大示意图。
22.图6为本技术实施例所提供的搬送机械手臂之牙叉与真空吸附装置的分解示意图。
【具体实施方式】
23.为了让本技术的上述及其他目的、特征、优点能更明显易懂,下文将特举本揭示优选实施例,并配合所附图式,作详细说明如下。再者,本揭示所提到的方向用语,例如上、下、
顶、底、前、后、左、右、内、外、侧层、周围、中央、水平、横向、垂直、纵向、轴向、径向、最上层或最下层等,仅是参考附加图式的方向。因此,使用的方向用语是用以说明及理解本揭示,而非用以限制本揭示。
24.现有搬送机械手臂的圆形吸盘容易因与玻璃基板的接触面积大导致沉积在圆形吸盘上的异物与玻璃基板接触,进而导致吸盘mura以及真空吸附异常等技术问题,以下实施例分别说明了本技术所提出真空吸附装置、包含其的搬送机械手臂及搬送系统如何解决上述技术问题。
25.第一实施例请参考图2及图3,本技术的一个实施例提供了一种真空吸附装置100,包括:底座1000,所述底座1000之上表面包括凹槽50,所述凹槽50内设置有第一连通孔501,所述底座1000之侧面设置有第二连通孔502,所述第一连通孔501与第二连通孔502相连通;通气管1004,与所述第二连通孔502相连通;密封件1001,设置于所述凹槽50之内;基座1002,所述基座1002的周缘气密地设置在设置于所述底座1000之上;以及吸嘴1003,设置于所述基座1002之上;其中,所述基座1002与所述吸嘴1003形成腔体结构,且所述吸嘴1003通过所述基座1002与所述底座1000相连通。
26.具体地,本实施例通过所述腔体结构承载玻璃基板,即通过所述吸嘴1003上部的边缘部份吸附玻璃基板,由于所述腔体结构与玻璃基板接触的部份仅在于所述吸嘴1003上部的边缘,接触面积小,异物不易残留在所述吸嘴1003上部的边缘而是容易沉积于所述腔体结构内,减少了异物与玻璃基板接触的情况,相较于现有的圆形吸盘,本实施例所提出的所述真空吸附装置100能够有效地降低因异物残留在吸附盘上而造成玻璃基板的偏光板被刺伤、吸盘mura以及真空吸附异常的风险。
27.所述腔体结构的正投影形状可以为矩形、椭圆形、或是多边形,即所述腔体结构可以为长方体、圆柱、或是多边体,具体形状可以根据实际情况决定,在能保证所述腔体与玻璃基板之间吸附力足够的情况下,尽量的降低所述腔体与玻璃基板之间的接触面积。
28.在本实施例中,大多数的异物均会沉积于所述腔体结构的内部而不会与玻璃基板接触,有效地降低了异物刺伤玻璃基板之偏光板的风险,所述吸嘴1003的材料为硅胶,由于硅胶为软性材料,其具备良好的弹性,因此,即便有少量的异物残留在所述吸嘴1003上部的边缘,相较于传统使用硬质材料所制作的吸附圆盘,也能够一定程度的防止异物刺伤玻璃基板之偏光板,并且,硅胶的软性质还能够防止所述吸嘴1003上部的边缘以及玻璃基板之间因异物而产生间隙,有效地解决了现有吸附圆盘与玻璃基板因异物而产生的真空吸附异常的问题。
29.在本实施例中,所述基座1002具有一凸起60,所述吸嘴1003通过所述凸起60套设在所述基座1002之上,安装过程简单,所述通气管1004与一抽气装置(未示出)相连接,所述抽气装置通过互相连通的所述通气管1004、所述第一连通孔501、以及所述第二连通孔502将所述真空吸附装置100之内部抽真空,所述密封件1001可以为o形环,当所述抽气装置运作时,此时所述真空吸附装置100内部之压力小于外界之压力,所述密封件1001可以避免外界空气进入所述真空吸附装置100以保证所述真空吸附装置100内部处于真空状态,进而保证所述真空吸附装置100能够稳定地吸附玻璃基板。
30.在本实施例中,所述底座1000之四个角落设置有第一孔洞503,所述基座1002之四个角落设置有第二孔洞504,所述第一孔洞503与所述第二孔洞504的位置相对应,所述底座
1000与所述基座1002可以通过螺丝、所述第一孔洞503、以及所述第二孔洞504互相固定。
31.第二实施例
32.更进一步地,请参考图3及图4,本技术的另一个实施例还提供一种搬送机械手臂10,包括:立轴200;移动元件300,设置于所述立轴200之一侧;手臂轴400,设置于所述移动元件300之一侧;以及多个牙叉500,与所述手臂轴400相连接且与所述手臂轴400往同一方向延伸,其中,每个所述牙叉500之一表面设置有凹面5001,所述凹面5001内镶有真空吸附装置100,所述真空吸附装置100由下至上包括:底座1000,所述底座1000之上表面包括凹槽50,所述凹槽50内设置有第一连通孔501,所述底座1000之侧面设置有第二连通孔502,所述第一连通孔501与所述第二连通孔502相连通;通气管1004,与所述第二连通孔502相连通;密封件1001,设置于所述凹槽50之内;基座1002,所述基座1002的周缘气密地设置在设置于所述底座1000之上;以及吸嘴1003,设置于所述基座1002之上;其中,所述基座1002与所述吸嘴1003共同形成腔体结构,且所述吸嘴1003通过所述基座1002与所述底座1000相连通。
33.请参考图5及图6,需要说明的是,本实施例中的所述真空吸附装置100镶于所述牙叉500的所述凹面5001之内,从而保证所述吸附装置100在承载玻璃基板的过程中不会错位,进一步地,所述通气管1004设置于所述牙叉500之内部并沿着所述牙叉500之长度方向延伸,并且通过所述第二连通孔502使得所述真空吸附装置100之所述底座1000与所述牙叉500相连接,所述吸嘴1003上部的边缘高于所述基座1002的上表面,从而保证所述吸嘴1003能够正常吸附玻璃基板。
34.所述立轴200包括滑轨(未示出),所述移动元件300能够沿着所述滑轨垂直移动,进而带动所述手臂轴400垂直移动,使得与所述手臂轴400连接的多个所述牙叉500能够通过所述真空吸附装置100带动玻璃基板垂直移动。
35.关于所述真空吸附装置100的特征已在第一实施例中说明,具体请参考第一实施例,此处不再赘述。
36.第三实施例
37.更进一步地,请参考图3至图6,本技术的另一个实施例还提供一种搬送系统1,包括:走行轴20;固定架30置于所述行走轴20之上且能够沿着所述行走轴20移动;旋转轴40,设置于所述固定架30之上;以及搬送机械手臂10;其中,所述搬送机械手臂10包括:立轴200,与所述固定架30通过所述旋转轴40枢接;移动元件300,设置于所述立轴200之一侧;手臂轴400,设置于所述移动元件300之一侧;以及多个牙叉500,与所述手臂轴400相连接且与所述手臂轴400往同一方向延伸,其中,每个所述牙叉500之一表面设置有凹面5001,所述凹面5001内镶有真空吸附装置100,所述真空吸附装置100由下至上包括:底座1000,所述底座1000之上表面包括凹槽50,所述凹槽50内设置有第一连通孔501,所述底座1000之侧面设置有第二连通孔502,所述第一连通孔501与第二连通孔502相连通;通气管1004,与所述第二连通孔502相连通;密封件1001,设置于所述凹槽50之内;基座1002,所述基座1002的周缘气密地设置在设置于所述底座1000之上;以及吸嘴1003,设置于所述基座1002之上;其中,所述基座1002与所述吸嘴1003共同形成腔体结构,且所述吸嘴1003通过所述基座1002与所述底座1000相连通。
38.关于所述真空吸附装置100的特征已在第一实施例中说明,具体请参考第一实施例,此处不再赘述。
39.综上所述,本技术所提出一种真空吸附装置、包含其的搬送机械手臂及搬送系统,所述真空吸附装置具备腔体结构,使得异物容易残留于所述腔体结构之内而不会与玻璃基板接触,避免了异物割伤玻璃基板之偏光板,且由于所述腔体结构与玻璃基板的接触面积小,避免了产品与腔体结构接触的部份出现mura现象。另外,所述腔体结构由软性材料所制作,因此,即便异物残留在所述腔体结构的边缘上,软性材料的特性也能够防止玻璃基板与所述真空吸附装置之间产生间隙,避免了所述真空吸附装置对于玻璃基板的吸附力受到异物的影响而降低。
40.以上仅是本揭示的优选实施方式,应当指出,对于本领域普通技术人员,在不脱离本揭示原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本揭示的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。