1.本发明属于机器人技术领域,特别是涉及一种基于偏置十字轴铰接的七自由度柔性机械臂。
背景技术:
2.柔性机械臂不同于传统刚性关节的机械臂,通常由多个柔性关节串联而成,具有自由度多、运动灵活等优点,特别适合在狭窄空间环境下应用,例如管道检测、复杂箱体内的检测、航空发动机在翼检测与维修等。
3.目前,柔性机械臂的关节普遍采用十字万向铰链、球铰结构或纯柔性材料支撑结构,存在关节结构复杂,外径尺寸较大,抗扭转刚度低等问题,极大地限制了其应用范围。此外,绳驱动的柔性机械臂普遍采用一个驱动电机驱动一条绳索,导致所需驱动电机很多,因此驱动机构较为复杂。
技术实现要素:
4.为了解决上述问题,本发明的目的在于提供一种基于偏置十字轴铰接的七自由度柔性机械臂。
5.为了达到上述目的,本发明提供的基于偏置十字轴铰接的七自由度柔性机械臂包括驱动机构、臂段机构、第一导轨和第一连杆;
6.其中,所述第一导轨包括滑轨、第一滑块、第二丝杠、第一驱动电机、第二联轴器和支撑架;第一驱动电机固定安装在支撑架的一端,输出轴通过第二联轴器与第二丝杠的一端相连接,第二丝杠的另一端以转动的方式安装在支撑架的另一端;滑轨以与第二丝杠平行的方式安装在支撑架上;第一滑块套装在第二丝杠且底面安装在滑轨上,因此能够在第一驱动电机的驱动下沿滑轨往复移动;
7.所述臂段机构包括结构完全相同且依次排布的第一关节单元、第二关节单元和第三关节单元;每个关节单元包括一个首端连杆、多个关节连杆、多个偏置十字关节轴、一根弹性支撑杆与四条驱动绳索;所述首端连杆的整体为圆柱体形结构,轴心处贯通形成有一个第一中心孔,后端面外侧部位沿径向对称凹陷形成有两个第一连接槽,并且两个第一连接槽的轴线位于一条直线,位于第一中心孔外侧的部位沿轴向贯通形成有多个对称分布的第一导向孔;关节连杆的整体为圆柱体形结构,轴心处贯通形成有一个第二中心孔,两端面外侧部位对称凹陷形成有两个第二连接槽,并且两个第二连接槽的轴线位于一条直线,位于第二中心孔外侧的部位沿轴向贯通形成有多个对称分布的第二导向孔;首端连杆与关节连杆以及相邻两个关节连杆之间均设置一个偏置十字关节轴;每个偏置十字关节轴包括偏置中心轴和四个关节轴;偏置中心轴的轴心处贯通形成有一个第三中心孔,偏置中心轴两端面上位于第三中心孔外侧的部位对称安装有两个关节轴,并且两个关节轴的轴线位于一条直线,同时两端面上的关节轴轴线相互垂直;每个端面上的两个关节轴外侧部位分别嵌入在首端连杆上的两个第一连接槽或关节连杆同一端面上的两个第二连接槽内,由此利用
偏置十字关节轴将两个关节连杆或首端连杆与关节连杆相互连接并形成两个轴线相互垂直的第一转动副,并且第三中心孔与上述首端连杆上的第一中心孔及关节连杆上的第二中心孔对齐,同时首端连杆上的每个第一导向孔与所有关节连杆上的一个第二导向孔对齐;弹性支撑杆贯穿设置在首端连杆的第一中心孔、各关节连杆的第二中心孔和偏置十字关节轴的第三中心孔内;四条驱动绳索的一端等间距连接在首端连杆上,相对的两条驱动绳索为一对,另一端穿过本关节单元以及位于本关节单元后侧的所有关节单元上同一位置的所有导向孔后连接在驱动机构上;
8.所述驱动机构包括三个分别与一个关节单元相连接的驱动单元、第一连接盘、第二连接盘、第三连接盘、圆台、第二连杆、第四连接盘、连接部件和中心连接件;第一连接盘、第二连接盘和第三连接盘间隔距离平行设置且中部利用中心连接件相互连接;圆台的底面安装在第三连接盘的顶面中部,圆台的顶面通过多根第二连杆与第四连接盘相连接;连接部件的一端连接在中心连接件的侧面上,另一端延伸至驱动机构的外侧且与第一导轨上的第一滑块固定连接;每个驱动单元包括两台第二驱动电机、两个第一联轴器、四个第一滑轮、两根第一丝杠、至少两根导向杆、两个第一力传感器、两个第二力传感器、两个第二滑块、四个第二滑轮和四个第三滑轮;两台第二驱动电机对称安装在第一连接盘的底面边缘部位,输出轴贯穿第一连接盘;第一联轴器位于第一连接盘和第二连接盘之间;两根第一丝杠对称设置,每根第一丝杠的一端以转动的方式安装在第三连接盘的外侧部位,另一端贯穿第二连接盘后通过一个第一联轴器与一台第二驱动电机的输出端相连接;每根第一丝杠的附近安装至少一根导向杆,导向杆的两端分别安装在第二连接盘和第三连接盘上;每个第二滑块同时套装在一根第一丝杠和附近的至少一根导向杆上,因此能够沿导向杆往复移动;每个第一力传感器和第二力传感器同时安装在一个第二滑块的底面和顶面上;四个第一滑轮对称安装在中心连接件上位于第一连接盘和第二连接盘之间的部位;四个第二滑轮对称安装在圆台的圆周面上;四个第三滑轮对称安装在圆台的顶面边缘上,并且每个第一滑轮分别与一个第二滑轮和一个第三滑轮的安装位置上下对齐;所述臂段机构中每个关节单元上每对驱动绳索中的一条驱动绳索先穿过第四连接盘、然后绕过一个第三滑轮和一个第二滑轮、再穿过第三连接盘后连接在一个驱动单元的一个第二力传感器上,另一条驱动绳索先穿过第四连接盘、然后绕过一个第三滑轮和一个第二滑轮、继而相继穿过第三连接盘和第二连接盘,再绕过一个第一滑轮后横向贯穿中心连接件、最后绕过另一个对称设置的第一滑轮后连接在第一力传感器上;
9.第一连杆的一端连接在驱动机构中第四连接盘的顶面中部,另一端连接在臂段机构中第一关节单元后端的关节连杆后端面上。
10.所述第一连杆为细长空心杆件。
11.所述首端连杆的中部圆周面上向内凹陷形成有两个对称的u型槽,同时位于第一中心孔与第一导向孔之间的部位沿轴向贯通形成有多个第一减重孔,以减轻首端连杆的整体重量。
12.所述关节连杆上位于第二中心孔与第二导向孔之间的部位沿轴向贯通形成有多个第二减重孔,同时两个端面中部向内凹陷形成,以减轻关节连杆的整体重量。
13.所述中心连接件为空心圆筒形结构。
14.本发明提供的基于偏置十字轴铰接的七自由度柔性机械臂具有以下优点:
15.1、采用偏置十字关节轴实现各个关节连杆之间的连接,加强了该柔性机械臂的抗扭转刚度,提高了柔性机械臂的运动精度,同时柔性机械臂的外径尺寸较小,使得该柔性机械臂可以很好地适应各种狭窄空间的检测和操作任务。
16.2、采用力传感器连接驱动绳索,通过感知预紧力的大小,从而改变驱动绳索的伸长量,由此来控制柔性机械臂的弯曲程度。
17.3、一个驱动电机驱动两根对称的驱动绳索实现该机械臂的一个弯曲自由度,减少了驱动电机的数量,使得该柔性机械臂更加小型化。
附图说明
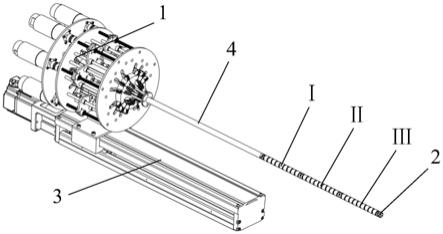
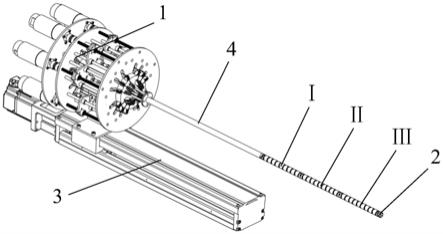
18.图1为本发明基于偏置十字轴铰接的七自由度柔性机械臂结构示意图。
19.图2为本发明中臂段机构的一个关节单元结构示意图。
20.图3为本发明中臂段机构的首端连杆结构示意图。
21.图4为本发明中臂段机构的关节连杆结构示意图。
22.图5为本发明中臂段机构的偏置十字关节轴结构示意图。
23.图6为本发明中驱动机构结构示意图。
24.图7为本发明中第一导轨结构示意图。
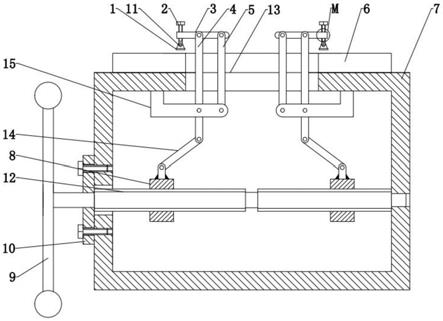
25.图8为本发明中驱动机构纵向剖面示意图。
具体实施方式
26.下面结合附图对本发明提供的基于偏置十字轴铰接的七自由度柔性机械臂进行详细说明。
27.如图1—图8所示,本发明提供的基于偏置十字轴铰接的七自由度柔性机械臂包括驱动机构1、臂段机构2、第一连杆4和第一导轨3;
28.其中,所述第一导轨3包括滑轨31、第一滑块32、第二丝杠311、第一驱动电机33、第二联轴器34和支撑架35;第一驱动电机33固定安装在支撑架35的一端,输出轴通过第二联轴器34与第二丝杠311的一端相连接,第二丝杠311的另一端以转动的方式安装在支撑架35的另一端;滑轨31以与第二丝杠311平行的方式安装在支撑架35上;第一滑块32套装在第二丝杠311且底面安装在滑轨31上,因此能够在第一驱动电机33的驱动下沿滑轨31往复移动;
29.所述臂段机构2包括结构完全相同且依次排布的第一关节单元ⅰ、第二关节单元ⅱ和第三关节单元ⅲ;每个关节单元包括一个首端连杆21、多个关节连杆22、多个偏置十字关节轴23、一根弹性支撑杆25与四条驱动绳索24;所述首端连杆21的整体为圆柱体形结构,轴心处贯通形成有一个第一中心孔212,后端面外侧部位沿径向对称凹陷形成有两个第一连接槽213,并且两个第一连接槽213的轴线位于一条直线,位于第一中心孔212外侧的部位沿轴向贯通形成有多个对称分布的第一导向孔211;关节连杆22的整体为圆柱体形结构,轴心处贯通形成有一个第二中心孔222,两端面外侧部位对称凹陷形成有两个第二连接槽223,并且两个第二连接槽223的轴线位于一条直线,位于第二中心孔222外侧的部位沿轴向贯通形成有多个对称分布的第二导向孔221;首端连杆21与关节连杆22以及相邻两个关节连杆22之间均设置一个偏置十字关节轴23;每个偏置十字关节轴23包括偏置中心轴232和四个关节轴231;偏置中心轴232的轴心处贯通形成有一个第三中心孔233,偏置中心轴232两端
面上位于第三中心孔233外侧的部位对称安装有两个关节轴231,并且两个关节轴231的轴线位于一条直线,同时两端面上的关节轴231轴线相互垂直;每个端面上的两个关节轴231外侧部位分别嵌入在首端连杆21上的两个第一连接槽213或关节连杆22同一端面上的两个第二连接槽223内,由此利用偏置十字关节轴23将两个关节连杆22或首端连杆21与关节连杆22相互连接并形成两个轴线相互垂直的第一转动副26,并且第三中心孔233与上述首端连杆21上的第一中心孔212及关节连杆22上的第二中心孔222对齐,同时首端连杆21上的每个第一导向孔211与所有关节连杆22上的一个第二导向孔221对齐;弹性支撑杆25贯穿设置在首端连杆21的第一中心孔212、各关节连杆22的第二中心孔222和偏置十字关节轴23的第三中心孔233内;四条驱动绳索24的一端等间距连接在首端连杆21上,相对的两条驱动绳索24为一对,另一端穿过本关节单元以及位于本关节单元后侧的所有关节单元上同一位置的所有导向孔后连接在驱动机构1上;
30.所述驱动机构1包括三个分别与一个关节单元相连接的驱动单元、第一连接盘102、第二连接盘104、第三连接盘109、圆台110、第二连杆113、第四连接盘114、连接部件117和中心连接件118;第一连接盘102、第二连接盘104和第三连接盘109间隔距离平行设置且中部利用中心连接件118相互连接;圆台110的底面安装在第三连接盘109的顶面中部,圆台110的顶面通过多根第二连杆113与第四连接盘114相连接;连接部件117的一端连接在中心连接件118的侧面上,另一端延伸至驱动机构1的外侧且与第一导轨3上的第一滑块32固定连接;每个驱动单元包括两台第二驱动电机101、两个第一联轴器103、四个第一滑轮115、两根第一丝杠105、至少两根导向杆106、两个第一力传感器107、两个第二力传感器108、两个第二滑块116、四个第二滑轮111和四个第三滑轮112;两台第二驱动电机101对称安装在第一连接盘102的底面边缘部位,输出轴贯穿第一连接盘102;第一联轴器103位于第一连接盘102和第二连接盘104之间;两根第一丝杠105对称设置,每根第一丝杠105的一端以转动的方式安装在第三连接盘109的外侧部位,另一端贯穿第二连接盘104后通过一个第一联轴器103与一台第二驱动电机101的输出端相连接;每根第一丝杠105的附近安装至少一根导向杆106,导向杆106的两端分别安装在第二连接盘104和第三连接盘109上;每个第二滑块116同时套装在一根第一丝杠105和附近的至少一根导向杆106上,因此能够沿导向杆106往复移动;每个第一力传感器107和第二力传感器108同时安装在一个第二滑块116的底面和顶面上;四个第一滑轮115对称安装在中心连接件118上位于第一连接盘102和第二连接盘104之间的部位;四个第二滑轮111对称安装在圆台110的圆周面上;四个第三滑轮112对称安装在圆台110的顶面边缘上,并且每个第一滑轮115分别与一个第二滑轮111和一个第三滑轮112的安装位置上下对齐;所述臂段机构2中每个关节单元上每对驱动绳索24中的一条驱动绳索24先穿过第四连接盘114、然后绕过一个第三滑轮112和一个第二滑轮111、再穿过第三连接盘109后连接在一个驱动单元的一个第二力传感器108上,另一条驱动绳索24先穿过第四连接盘114、然后绕过一个第三滑轮112和一个第二滑轮111、继而相继穿过第三连接盘109和第二连接盘104,再绕过一个第一滑轮115后横向贯穿中心连接件118、最后绕过另一个对称设置的第一滑轮115后连接在第一力传感器107上;
31.第一连杆4的一端连接在驱动机构1中第四连接盘114的顶面中部,另一端连接在臂段机构2中第一关节单元ⅰ后端的关节连杆22后端面上。
32.所述第一连杆4为细长空心杆件。
33.所述首端连杆21的中部圆周面上向内凹陷形成有两个对称的u型槽214,同时位于第一中心孔212与第一导向孔211之间的部位沿轴向贯通形成有多个第一减重孔215,以减轻首端连杆21的整体重量。
34.所述关节连杆22上位于第二中心孔222与第二导向孔221之间的部位沿轴向贯通形成有多个第二减重孔224,同时两个端面中部向内凹陷形成,以减轻关节连杆22的整体重量。
35.所述中心连接件118为空心圆筒形结构。
36.本发明提供的基于偏置十字轴铰接的七自由度柔性机械臂的工作原理为:通过驱动机构1上的每台第二驱动电机101分别通过第一联轴器103驱动第一丝杠105旋转,从而使第二滑块116沿导向杆106往复移动,由此带动两条对称的驱动绳索24实现一个关节单元的一个弯曲自由度;一条驱动绳索24的一端连接到臂段机构2中关节单元的首端连杆21上,另一端连接到驱动机构1中驱动单元的第一力传感器107上,另一条对称的驱动绳索24的一端连接到驱动单元的第二力传感器108上,另一端连接到臂段结构2中关节单元的首端连杆21上;可通过力传感器感知预紧力大小,从而改变驱动绳索24的伸长量来驱动柔性机械臂的弯曲程度;每个驱动单元只需两台第二驱动电机101驱动,最终通过六个第二驱动电机101实现臂段机构2的六个弯曲自由度,从而达到对柔性机械臂末端位置控制的目的;另外,可通过第一驱动电机33驱动驱动机构1及臂段机构2在第一导轨3上滑动而实现整个柔性机械臂的移动自由度;本柔性机械臂总共具有六个弯曲自由度与一个移动自由度,共七个自由度;该机械臂具有运动灵活、柔顺性高、外径尺寸小、所需驱动少与抗扭转刚度大等优点,可以很好地适应各种狭窄空间的检测和操作任务。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。