1.本发明涉及机械手技术领域,具体涉及一种具备人工触觉的变刚度柔性夹爪。
背景技术:
2.随着城市河流环境治理的发展、海洋资源的开发,水下机器人技术成为机器人技术领域的重点研究方向,其中水下抓取作为水下机器人的关键技术,并以其较高的实施难度,成为研究难点。水下抓取的一大应用环境为浑浊液体环境,如非流动的自然水体、水下泥浆环境、水下油气环境等。比如目前建筑行业地下打桩时可能出现钻头断在地下的情况,由于钻眼往往通过地下水层且无法对钻眼壁进行加固,钻眼为泥浆环境,无法通过机器将钻头打捞出,目前的常用方法是潜水员潜入通过触觉判断钻头位置并套绳打捞,该方法对实施人员危险较大。该类问题在矿业开采、油气开采等很多行业都存在,因此在浑浊液体中能具备触觉是水下抓取/打捞领域的重要课题。
3.水下抓取通常面向大小、形状、重量等无法精确确定的物品,且物品通常表面较滑,材质软硬变化范围较大,比空气中的物品具有更复杂的表面特性,不利于抓取。水下的水压、水流运动、导电性等特性不利于精密传感器与驱动器的应用,难以形成复杂的抓取控制闭环。目前水下抓取的主流方案,一种是传统机器人抓取,其面临上述技术问题且效果不理想;另一种是用网捕捞、吸水等水下特定的技术方案,难以实现精确抓取。
4.柔性夹爪因其能柔性形变,被广泛应用于对外形变化范围较大的多种物品进行夹取,比如纸片、芯片、小零件、电子器件等。其夹取的原理是,在一软囊内填充(不填充满,通常填充至半满)大量的小颗粒,并向软囊内注入气体或液体使软囊内的颗粒处于疏松状态,具备流体的流动特性,在疏松状态下,下方夹爪时软囊和颗粒包裹住物体,然后抽取软内的气体或液体使软囊内呈现负压,软囊内的颗粒受气压压紧为紧密状态,紧紧裹住物体,此时上拉夹爪便可夹取物体。此类柔性夹爪相对于传统气动夹爪的优势在于,不仅可以抓取更重的物体,而且对较软材质物体、表面较滑的物体也都可以进行夹持,比较适合于进行水下夹取。然而,利用此类柔性夹爪进行水下夹取尤其是浑浊液体环境中,仍然面临无法看清物体导致夹取难以进行,无法准确、快速夹取物体的问题。
技术实现要素:
5.本发明针对目前水下(尤其是浑浊液体环境)夹取所存在的抓取困难、无法判断物体形状导致抓取不准确等一系列问题,提出一种具备人工触觉的变刚度柔性夹爪,利用全透明的固液混合物,通过内置形状探测装置获知物体形状,实现人工触觉,并同时对大小、形状、重量等物理量变化范围较大的物体进行抓取。
6.本发明技术方案如下:
7.一种具备人工触觉的变刚度柔性夹爪,包括作为夹爪主体的弹性软囊,所述软囊用于装载固体颗粒和可抽取的填充介质,所述填充介质为透明液体,所述固体颗粒为透明颗粒,且所述透明颗粒置于所述透明液体中时为不可见;所述软囊内设有形状探测装置,在
抓取过程中,所述软囊及其内部固体颗粒逐渐包裹被抓物体,致使软囊随被抓物体的形状发生自适应形变,所述形状探测装置根据软囊的所述形变获取被抓物体的形状,实现人工触觉。
8.进一步地,所述软囊的内侧表面具有标记点阵列,所述形状探测装置为设置在所述软囊内且视场覆盖所述标记点阵列的摄像模块,通过所述摄像模块识别由软囊形变所致的标记点位置变化来获取所述被抓物体的形状。
9.进一步地,所述形状探测装置为激光雷达、深度相机或tof相机,通过激光雷达、深度相机或tof相机获取软囊形变的三维信息,以获知所述被抓物体的形状。
10.进一步地,所述软囊的囊膜为不透明材质。
11.进一步地,通过调节所述透明液体的折射率与所述透明颗粒的折射率保持一致,来使所述透明颗粒在所述透明液体中为不可见。
12.进一步地,通过调节液体浓度来实现所述透明液体的折射率调节。
13.进一步地,所述透明颗粒包括有机玻璃颗粒、高硼硅玻璃颗粒和/或二氧化硅颗粒;当所述透明颗粒采用有机玻璃颗粒时,采用的所述透明液体为浓度72%的四氢化萘与浓度28%的无水乙醇的混合液,或者为纯净的对伞花烃;当所述透明颗粒采用高硼硅玻璃颗粒时,采用的所述透明液体为浓度59%的碘化钠溶液;当所述透明颗粒采用二氧化硅颗粒时,所述透明液体采用折射率为1.47的溶液。
14.进一步地,当往所述软囊内注入所述透明液体时,使所述透明液体的液面没过所述摄像模块的摄像头。
15.进一步地,所述软囊内设有滤网,所述透明颗粒被限制在所述滤网下方。
16.进一步地,所述摄像模块具有照明灯。
17.与现有技术相比,本发明至少具有如下有益效果:
18.1)本发明可以使夹爪具备人工触觉,适合有人操作情况下对环境、夹持物的判断,或无人操作下的机器触觉辅助,特别适合在浑浊液体环境中使用;
19.2)本发明是液体驱动柔性夹爪,特别适合在有水环境中使用,特别适合对大小、形状、表面特性复杂的物体进行抓取;
20.3)本发明的柔性夹爪,其软囊能够自适应改变自身形状符合被夹物体,并自适应分配夹持力,能达到具有传感器和驱动器的复杂闭环控制机械夹爪同样的效果;
21.4)本发明不依赖摩擦力为主要夹持力,非常适合对于具有滑动表面的物体的夹持;
22.5)本发明驱动部件为水泵,不必与夹爪本身固定在一起,夹爪本身可以完全无源,夹爪尤其适合完全浸没于水下、泥沼或污染环境中使用;
23.6)本发明所用到的器件成本低,易于安装生产。
附图说明
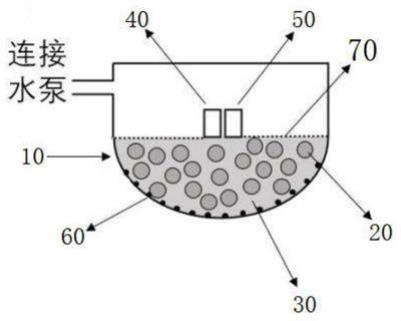
24.图1是本发明实施例的一种具备人工触觉的变刚度柔性夹爪示意图;
25.图2是本发明实施例的柔性夹爪随物体自适应形变的示意图;
26.图3是本发明实施例的柔性夹爪利用摄像头实现人工触觉的示意图;
27.图4是本发明实施例的柔性夹爪利用摄像头识别物体形状的结构光原理图。
具体实施方式
28.下面结合附图和具体的实施方式对本发明作进一步说明。
29.图1为本发明实施例提出的一种具备人工触觉的变刚度柔性夹爪示意图,参考图1,该柔性夹爪包括作为夹爪主体的弹性软囊10,该软囊10用于装载固体颗粒20和可抽取的填充介质30,该填充介质30例如是液体或气体,基于颗粒阻塞原理实现抓取,所谓颗粒阻塞是指:大量颗粒在受外力作用下紧密排列形成较大区域颗粒团,在颗粒团中的颗粒彼此受力平衡,受到一定外力时能保持彼此位置相对不变;而颗粒雄松散状态变换到紧密排列状态,其宏观呈现类似液态到固态的相变过程。固体颗粒20在填充介质30中呈松散状态,具备液体流动性质,因此可以随被抓物体的形状自适应变形,包裹物体,此时将填充介质抽掉,使软囊内呈负压,颗粒被压紧形成较大区域颗粒团,由于颗粒团中的颗粒彼此受力平衡,受到一定外力时能保持彼此位置相对不变,因此可以紧紧地裹住物体,实现抓取。在本发明实施例的柔性夹爪中,采用液体作为填充介质,基于其更好的流动性,可与固体颗粒形成密度一致的流体。优选地,软囊的囊膜采用不透明材质。
30.在本发明实施例中,固体颗粒和作为填充介质的液体均为透明的,并且,还需要满足固体颗粒在液体中为不可见的状态,也就是说,透明颗粒的折射率与透明液体的折射率基本一致。软囊10内设有形状探测装置如摄像模块40,摄像模块40带有照明灯50以提供拍摄所需光线。在抓取过程中,软囊10及其内部固体颗粒20逐渐包裹被抓物体,致使软囊10随被抓物体的形状发生自适应形变,所述形状探测装置根据软囊的所述形变获取被抓物体的形状,实现人工触觉。这样一来,对于水下夹取尤其是浑浊液体中不可视的作业工况,便可通过形状感知来判断是否为目标物,防止徒劳的夹取。
31.如图1所示,在一些实施例中,形状探测装置可为摄像模块40,此种情况下,软囊10的内侧表面具有一系列标记点60,形成标记点阵列,摄像模块40的视场覆盖所述标记点阵列。在抓取物体的过程中,如图2所示,软囊和软囊内的固液混合物(固体颗粒和液体)逐渐包裹被抓物体100,此时软囊可自适应物体形状而形变,内侧的标记点位置也发生变化,通过摄像模块40识别由软囊形变所致的标记点位置变化,可获知被抓物体的形状,实现人工触觉。
32.如图3所示,是本发明实施例的柔性夹爪利用摄像头实现人工触觉的原理,弹性的柔性囊膜11内侧面上具有排列整齐的点阵,当囊膜由于外部物体而发生形变时,点阵中的点如p点,空间位置发生了变化,变为在空间中的p’点,此时点阵发生扭曲,这种扭曲表征了形状的变化,可以根据点阵中点的空间位置变化拟合物体的形状。具体过程描述如下:
33.如图4所示,某标记点原位置为a,触碰物体后点a变形到新位置a’,o点为摄像头光心。在无物体触碰时,通过标定可知道点a对摄像头的张角β。当柔性夹爪从某个方向触碰物体并产生形变时,由于柔性夹爪的控制轨迹已知,因此变形后点a’与点a的方向α已知,则有
34.∠a'ao=180
°‑
α
‑
β
35.通过摄像头图像点a与a’的图像为a和a’,则张角∠a'oa=∠aoa',由于标定时可将无变形的点a位置标定为已知(oa长度已知),则有
[0036][0037]
由于无触碰的点a位置可提前确定,同时aa’角度及长度也得到,因此变形后的位
置a’可以确定,从而拟合物体形状。
[0038]
在另一些实施例中,形状探测装置也可以为激光雷达、深度相机或tof相机等,当软囊随物体自适应改变形状时,可通过激光雷达、深度相机或tof相机直接获取软囊形变的三维信息,以获知被抓物体的形状。此种情况可以不需要特征点阵列。
[0039]
在本发明实施例中,为了避免折射对形状探测尤其是摄像模块拍摄造成影响,一方面填充液体的液面至少没过摄像头,让液体与摄像头之间没有折射界面;另一方面,让透明颗粒在透明液体中为不可见的状态,这样颗粒与液体接触界面无折射。可以通过调节所述透明液体的折射率与所述透明颗粒的折射率保持一致,来使所述透明颗粒在所述透明液体中为不可见。比如,在透明容器中放置透明固体颗粒,并导入高浓度透明溶液(可为有机溶液,也可为无机溶液),然后逐渐稀释溶液直至颗粒在溶液中不可见。
[0040]
所采用的透明固体颗粒可以为有机玻璃颗粒、高硼硅玻璃颗粒和/或二氧化硅颗粒,或者其它类似的透明颗粒,折射率在1.5左右。而透明液体可以采用更高折射率溶液(有机溶液如甘油、苯、汽油、四氢化萘及酒精的混合液等,无机溶液如碘化钠溶液等),折射率通常可以通过溶液的浓度搭配与颗粒相一致。比如有机玻璃颗粒(折射率约为1.49),在浓度72%的四氢化萘与浓度28%无水乙醇的混合液中可实现全透明不可见,也可以在纯净的对伞花烃中实现完全透明。再比如,高硼硅玻璃颗粒在浓度59%的碘化钠溶液中可实现完全透明;二氧化硅颗粒在折射率为1.47的折射率匹配液中可实现完全透明。
[0041]
上述固液混合物配方均为室温有效,均对可见光有效,实际使用时,由于视觉实施的范围较小,试剂材料方面的少量浓度误差不影响实际使用。另,应当理解的是,上述几个固液混合物配方实施例不用于限制本发明的保护范围,只为说明本发明所述完全透明的固液混合液无技术上的实施问题。基于完全透明且无折射界面影响的固液混合物,摄像头可透过该固液混合物而观察到囊膜内侧面上标志点的分布情况。
[0042]
在浑浊液体环境中实施夹取的工况:当被夹物体尚未靠近夹爪时,由于整个夹爪与被夹物体均浸于浑浊液体中,因此摄像头看不到被夹物体;而当被夹物体贴近夹爪时,摄像头可透过液体与固体颗粒混合物看到标志点的扭曲(位置变化)情况,并判断被夹物体形状,如果判断是所要夹取的目标物,则连接水泵处会产生负压(抽取液体),将液体抽出一定范围,颗粒聚集夹紧被夹物体,整个过程均可通过摄像头看到被夹物体的形状,从而使夹爪具备人工触觉。
[0043]
标志点可通过印刷、手工绘制等方法画在薄膜朝向摄像头一侧。标志点可以是点阵列、线阵列或其他形状。摄像模块及其灯应为防水设计。另外,可以在软囊内设置滤网70,透明颗粒被限制在滤网70下方。滤网以上空间可以充满液体或部分是液体,也可以不填充而是空气。
[0044]
总之,本发明实施例的柔性夹爪不仅可以实施空气环境中的正常夹取,更适合于水下实现精确的水下夹取,可以对重物、表面光滑物、形状复杂物实施夹取,并可具备精度更高的人工触觉。为了增加精度,摄像头可以采用两个甚至多个。
[0045]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干等同替代或明显变型,而且性能或用途相同,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。