1.本发明涉及自适应控制领域,具体涉及到一种基于双目视觉的机械臂运动学自标定方法。
背景技术:
2.近年来,机械臂控制作为一种极具前景和应用价值的技术在汽车制造、果实采摘、流水线作业、外科手术等领域发挥了重要的作用,对工业、农业、制造业的发展具有重要意义。大多数多自由度机械臂系统本质上是一种半闭环的控制结构,系统只能精确控制关节伺服电机位置,而电机位置与机械臂末端执行器位置之间关系通过运动学确定。目前国内外机械臂厂商生产的机械臂受加工装配的影响,不能保证各个模块绝对的契合,而且机械臂在运行的过程中电机磨损、外部噪声等非几何因素直接影响机械臂的模型参数,造成理论运动学模型与实际模型之间不可避免的存在误差,从而导致末端位置的误差。当前环境下,一套完整的标定技术通常以机械臂建模、手眼标定、计算机视觉辅助相结合的形式出现。机械臂模型方面包括有模型和无模型两大类,前者包括d
‑
h model、mdh model、cpc model、poe model等,后者有基于混合模型的前馈控制、实测数据拟合空间圆来构造坐标系的方法。手眼标定方面主要的研究点在提高算法精度和减少对标定物体的依赖上,使用激光跟踪仪、示教器等昂贵的设备采集数据,并用离线或在线的手段进行优化。计算机视觉辅助主要用于物体定位、环境识别、分类问题求解等方面。标定过程繁琐,成本高而且需要人工的参与。为了解决这一问题,本发明在保证机械臂绝对定位精度的前提下,将机械臂模型和手眼转换矩阵相融合,不需要额外进行手眼标定,改善了整个标定系统,以一套低成本的设备实现了标定全程自动化。
技术实现要素:
3.针对现有机械臂运动学标定过程繁琐、成本过高且需要人工参与的问题,本发明提出一种基于双目视觉的机械臂运动学自标定方法,采用多种群自适应差分算法对所提出的混合模型参数进行参数辨识,降低了非几何因素造成的末端定位精度影响,简化标定系统冗余度,实现标定全程自动化,并且建立伺服电机模型,采用最小二乘法优化模型,进一步提高了机械臂的绝对定位精度。
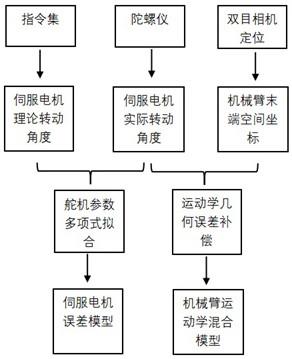
4.一种基于双目视觉的机械臂运动学自标定方法,其具体技术方案步骤如下:步骤一:采集数据:通过双目相机获取机械臂末端位置信息,使用六轴陀螺仪获取机械臂各关节实际转动角度,将随机产生的指令集转换成角度作为理论转动角度;步骤二:设计机械臂运动学混合模型参数辨识方法:将dh理论和手眼标定理论相融合,建立机械臂运动学混合模型。运用多种群自适应差分算法进行模型的训练,求解混合模型参数;步骤三:设计伺服电机模型,通过训练获得补偿后的角度:通过拟合多项式的方法建立起各伺服电机模型,使用最小二乘法进行多项式参数的求解以及补偿预测。
5.进一步的,步骤一具体包括:随机生成n组指令构成指令集,将指令集中的指令转换为各舵机待转的角度作为理论转动角度;执行指令集中的指令,同时读取陀螺仪获取的机械臂各关节实际转动角度和双目相机获取的机械臂末端位置信息。
6.进一步的,步骤二具体包括:机械臂各关节构建笛卡尔空间坐标系,通过dh模型正向运动学推导获得机械臂底座到末端的转换关系,相邻坐标系i到i
‑
1转换关系如公式(1)所示:(1)可推导为:(2)公式(2)中c表示cos,s表示sin。代表相邻连杆坐标系的旋转,代表相邻连杆坐标系的平移。
7.机械臂底座和机械臂末端转换矩阵如公式(3)所示:(3)双目相机坐标系和机械臂底座坐标系之间的转换关系通过绕x、y、z三个轴的旋转平移获得,如公式(4)所示:(4)式中dx、dy、dz分别表示沿x、y、z轴平移的距离,ax、ay、az分别表示绕x、y、z轴旋转的角度。
8.混合模型的转换关系如下:(5)t矩阵为4
×
4矩阵,以上推导结果可简化为:(6)公式(6)中表示i轴机械臂关节输入变量,表示相机坐标系下机械臂末端坐标,表示机械臂末端姿态。
9.进一步的,步骤三具体包括:舵机误差模型的设计如公式(7)所示:(7)式中f(x)和x分别表示所采集的机械臂的理论转动角度和实际转动角度。
10.最小二乘法损失函数的设计如下式所示:(8) 对目标函数求偏导,完成进一步优化:完成进一步优化:
……
使用最小二乘法求取多项式系数,完成舵机误差补偿。
11.本发明还提供了一种基于双目视觉的机械臂运动学自标定方法,包括机械臂绝对定位精度标定的混合模型、舵机误差补偿及优化策略、多种群自适应差分算法。其中,机械臂绝对定位精度标定的混合模型用于构建机械臂末端坐标系和相机坐标系的转换关系。舵机误差补偿及优化策略用于降低舵机误差对机械臂绝对定位精度的影响。多种群自适应差分算法在对机械臂混合模型参数优化过程中,动态改变差分算法参数中的缩放因子、交叉概率。
12.本发明的有益效果是:1.机械臂动作过后采集角度及坐标数据避免了以往方法中机械臂运动学逆解中雅可比矩阵的计算,读数更加精准,且不需要人工的参与;2.混合模型的建立,直接建立机械臂伺服电机角度到相机坐标系的映射关系。避免了以往手眼标定环节中机械臂底座坐标系的建立,进而不需要使用激光跟踪仪、示教器等高成本设备,同时也避免了人工参与的影响;3.舵机误差模型的建立进一步降低舵机误差对机械臂绝对定位精度的影响;4.相比较于一般的差分算法,本发明采用的多种群自适应差分算法缩放因子、交叉概率动态改变,搜索范围更大,不易陷入局部最优解。
附图说明
13.附图可以更加直观的说明本发明的创新点,以下将对本发明附图进行进一步介绍。
14.图1为本专利所提方法的实施结构图。
15.图2为机械臂模型结构图。
16.图3为机械臂底座坐标系和双目相机坐标系转换结构图。
17.图4为多种群自适应差分算法结果图。
18.图5为混合模型求解速度。
19.图6为数据归一化处理后舵机模型拟合曲线。
具体实施方式
20.下面详细描述本发明的实施方式,一种基于双目视觉的机械臂运动学自标定方法,所述实施方式的示例在图1中示出。下面通过其他参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
21.采集机械臂末端位置信息、伺服电机理论转动角度、伺服电机实际转动角度,采集方式如下:可选的,根据机械臂的机械结构确定每个伺服电机指令数据范围,拟采集50组数据,对于任意n轴刚体机械臂。随机产生50组指令,每组指令包含n个舵机转动信息,将指令转换成角度作为伺服电机理论转动角度。
22.机械臂在执行指令的过程中,使用陀螺仪采集每个关节的转动角度,50组指令对应50组实际转动角度,由此完成50组伺服电机实际转动角度的采集。
23.机械臂末端位置信息的采集通过双目相机识别定位机械臂末端小球的质心来获得。所采集坐标点是相机坐标系下机械臂末端的空间坐标。
24.在采集过程中,机械臂按照随机产生的指令执行后,陀螺仪采集伺服电机实际转动角度,双目相机定位机械臂末端位置,为避免采集数据环节出现数据错乱,每个子系统加入线程锁,或每个子系统休眠2s。
25.设计机械臂运动学混合模型参数辨识方法:将dh理论和手眼标定理论相融合,建立机械臂运动学混合模型。机械臂各关节构建笛卡尔空间坐标系,通过正向运动学推导获得机械臂底座到末端的转换关系,相邻坐标系i到i
‑
1转换关系如公式(9)所示:(9)矩阵形式为:(10)公式(10)中c表示cos,s表示sin。代表相邻连杆坐标系的旋转,代表相邻连杆坐标系的平移,其中0<i<n 1。
[0026] 机械臂底座和机械臂末端转换矩阵如公式(11)所示:
(11)双目相机坐标系和机械臂底座坐标系之间的转换关系如图3所示,可以通过绕x、y、z三个轴的旋转平移获得,如下式所示:(12)公式(12)中dx、dy、dz分别表示沿x、y、z轴平移的距离,ax、ay、az分别表示绕x、y、z轴旋转的角度。
[0027]
混合模型的转换关系如下:(13)t矩阵为4
×
4矩阵,以上推导过程可简化为:(14)公式(14)中表示n轴机械臂关节输入变量,表示相机坐标系下机械臂末端坐标,表示机械臂末端姿态。
[0028]
混合模型共有4n 6个参数,其中基于dh方法的参数()有n组,相机坐标系和机械臂底座坐标系参数有6个,分别为:dx、dy、dz、ax、ay、az。使用多种群自适应差分算法进行参数辨识。
[0029]
将50组伺服电机实际转动角度作为混合模型的输入,双目相机识别的末端位置坐标作为混合模型的输出,辨识结果如图4所示。参数辨识的过程不需要人工参与,动态改变差分算法参数中的缩放因子、交叉概率。搜索范围扩大的同时,不易陷入局部最优解。所选用的代价函数如下:(15)算法的收敛速度如图5所示,模型的求解耗时18s。
[0030]
混合模型的建立为了建立机械臂各关节转动的理论角度到机械臂末端的映射关系,为了进一步提高机械臂绝对定位精度,本发明通过多项式拟合建立了机械臂各关节理论转动角度到实际转动角度的映射。拟合之前需要对数据进行归一化处理,使最优解的寻优过程更加平缓。
[0031]
伺服电机模型的设计如下式所示:(16)式中f(x)和x分别表示所采集的机械臂的理论转动角度和实际转动角度。k次多项式未知参数为k个系数和1个常数项。
[0032]
最小二乘法损失函数的设计如下式所示:
(17)对目标函数求偏导,完成进一步优化:完成进一步优化:
……
使用最小二乘法求取多项式系数,即可建立机械臂的理论转动角度和实际转动角度的映射关系,拟合情况如图6所示,横纵坐标分别表示归一化后的机械臂理论转动角度和实际转动角度,然后对数据反归一化处理完成舵机误差的补偿。
[0033]
以上所述仅为本发明的较佳实施方式,用以说明本发明的技术方案,并非对其限制,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。