技术特征:
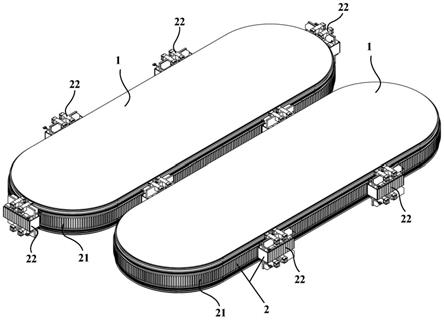
1.一种直驱式多轨柔性输送系统,其特征在于:所述系统包括两个及以上的环形基座(1)和初级励磁型直线电机(2),各环形基座(1)安装在同一个水平面上,初级励磁型直线电机(2)安装于环形基座(1)的环形侧面;初级励磁型直线电机(2)包括长定子(21)和多个动子(22),各动子(22)之间相互独立运行且不存在电磁耦合,动子(22)通过磁性吸力吸附于长定子(21)上并在动子(22)和长定子(21)之间留有气隙;相邻环形基座(1)之间留有容纳单个动子(22)通行的间隙,动子(22)在不同环形基座(1)相平行对齐的间隙处从一个环形基座(1)到另一个环形基座(1)变轨运行;长定子(21)固接于环形基座(1),由多段齿槽结构的定子铁芯沿环形基座(1)环形侧面布置且无缝衔接而成,定子铁芯的内表面固定在环形基座(1)的环形侧面上,定子铁芯的外表面沿环形基座(1)的环形方向开设齿槽;动子(22)包括短初级(28)和滚轮导轨组件,短初级(28)和滚轮导轨组件通过支架固定连接一起,短初级(28)位于长定子(21)的外侧方,短初级(28)和长定子(21)之间留有气隙,短初级(28)的两侧均设有滚轮导轨组件,滚轮导轨组件包括滚轮(23b)和导轨(23a),导轨(23a)沿环形基座(1)的环形方向、平行于长定子(21)布置方向铺设并固接于环形基座(1)的环形侧面,滚轮(23b)连接在导轨(23a)上并沿导轨移动。在滚轮导轨组件中的滚轮(23b)和导轨(23a)相互连接支撑下,使得短初级(28)与长定子(21)保持具有气隙。2.根据权利要求1所述的一种直驱式多轨柔性输送系统,其特征在于:所述的定子铁芯分为在环形基座(1)环形侧面的平面上布置的直线段(21a)和在环形基座(1)环形侧面的弧面上布置的弧形段(21b),所述的弧形段(21b)的定子铁芯的弧形内径与环形基座(1)环形侧面的弧形段外径相同。3.根据权利要求1所述的一种直驱式多轨柔性输送系统,其特征在于:所述的短初级(28)包括非对称结构的永磁体阵列(281)、电枢绕组(282)和初级铁芯(283),初级铁芯(283)中部为轭部,轭部两侧的初级铁芯(283)在朝向长定子(21)的一侧和远离长定子(21)的一侧均开设半闭口槽,每一侧沿平行于长定子(21)布置方向间隔开设多个半闭口槽,相邻半闭口槽之间形成电枢齿,每个电枢齿绕制一个线圈作为电枢绕组(282);永磁阵列(281)由多个永磁单元紧密并排组成并表贴于初级铁芯(283)电枢齿的表面,每个永磁单元沿平行于长定子(21)布置的任一单方向由永磁体a和永磁体b固定顺序并排贴合构成,永磁体a和永磁体b极性相反,永磁体b沿长定子(21)布置方向的宽度大于永磁体a沿长定子(21)布置方向的宽度,形成非对称;每个半闭口槽的开口处均布置一个永磁体b,每个半闭口槽的电枢齿外端面布置一个永磁体a;所述电枢绕组(282)采用集中绕组结构且分为上下两个单元,电枢绕组上单元绕制在初级铁芯(283)轭部上侧的电枢齿上,电枢绕组下单元绕制在初级铁芯(283)轭部下侧的电枢齿上,电枢绕组上下两个单元独立供电。4.根据权利要求1所述的一种直驱式多轨柔性输送系统,其特征在于:所述的初级铁芯(283)采用叠片铁芯,叠片铁芯的叠方向是沿垂直于动子(22)运动方向和平行于长定子(21)的定子铁芯安装表面。5.根据权利要求1所述的一种直驱式多轨柔性输送系统,其特征在于:
所述永磁单元的数目与初级铁芯的齿数相同,且在单个动子长度范围内长定子(21)的定子铁芯的齿数设置为(kn
ph
2n
ph
)
±
1,其中kn
ph
表示初级铁芯(283)的齿数,k表示槽数系数,n
ph
为永磁直线电机的相数。6.根据权利要求1所述的一种直驱式多轨柔性输送系统,其特征在于:所述的初级励磁型直线电机(2)还包括供电模块(24),供电模块(24)主要由供电单元和受电单元构成,且供电单元和受电单元分别安装于环形基座(1)和动子(22)上;供电单元由u型结构的两条滑触线(241)构成,每条滑触线均沿环形基座(1)的环形方向、平行于长定子(21)布置方向布置并固接于环形基座(1)的环形侧面,两条滑触线并排分别布置于长定子(21)的两侧,分别构成正极电源线和负极电源线,端部外接供电电源;受电单元由包含碳刷的两个集电器(242)构成,两个集电器(242)分别滑触连接在两条滑触线(241)。7.根据权利要求1所述的一种直驱式多轨柔性输送系统,其特征在于:所述的初级励磁型直线电机(2)还包括位置检测模块(26),位置检测模块(26)包括片无源磁栅尺(26a)和信号读数头(26b),无源磁栅尺(26a)沿环形基座(1)的环形方向、平行于长定子(21)布置方向布置并固接于环形基座(1)的环形侧面,信号读数头(26b)和动子(22)一起固定安装,信号读数头(26b)位于无源磁栅尺(26a)侧方,信号读数头(26b)和无源磁栅尺(26a)配合进行位置检测。8.根据权利要求1所述的一种直驱式多轨柔性输送系统,其特征在于:所述的初级励磁型直线电机(2)还包括功率驱动模块(25)、无线通讯模块(27)和上位机,功率驱动模块(25)、无线通讯模块(27)和动子(22)一起固定安装,功率驱动模块(25)从受电单元获取电能并输出三相交流电到动子(22)中短初级(28)的电枢绕组(282)上,用于驱动动子(22)运动;位置检测模块经无线通讯模块和上位机连接,无线通讯模块(27)将位置检测模块检测采集的各动子参数实时传送至上位机,并接收由上位机下发的运动指令。9.根据权利要求1所述的一种直驱式多轨柔性输送系统,其特征在于:所述的供电模块(24)的受电单元、位置检测模块(26)的信号读数头(26b)、功率驱动模块(25)和无线通讯模块(27)均集成安装于短初级(28)周围,并固定于支架上随短初级(28)一起同步运动。10.应用于权利要求1
‑
9任一所述直驱式多轨柔性输送系统的控制方法,其包括协同控制算法和变轨控制算法;协同控制算法包括以下步骤:步骤一:各动子(22)间采用并行同步控制,由上位机并行下发控制指令给各个动子;步骤二:根据位置信号反馈,上位机实时监测n个动子(22)的实时位置[p1,p2,
…
,p
n
],根据实时位置计算出n个动子间的运行距离[l1,l2,
…
,l
n
],其中l1表示第一个动子与第二个动子间的距离,l2表示第二个动子与第三个动子间的距离,l
n
表示第n个动子与第一个动子间的距离;步骤三:对比判断n个动子间的运行距离[l1,l2,
…
,l
n
]与最小安全运行距离l
s
的关系,当第k段运行距离l
k
小于最小安全运行距离ls时,调取第k个和第k 1个动子的运行数据;步骤四:根据速度和位置指令,分别判断第k个和第k 1个动子的实际运行速度和位置值与指令值的偏差,当偏差大于设定阈值时,则认定该动子存在故障,对该动子重新下发速度与位置指令值,功率驱动模块调整输出驱动电流大小以纠正运动状态;步骤五:监测故障动子的运行数据,在十个控制周期内若其与相邻动子的运行距离仍
小于最小安全运行距离l
s
,则全部动子紧急停机,故障动子向上位机发送故障信号;变轨控制算法包括以下步骤:步骤一:设定各环形基座上的变轨段标记位置[p1
on
,p1
off
,p2
on
,p2
off
,
…
,pn
on
,pn
off
],其中数字1、2和n分别表示第1、第2和第n个环形基座,on表示变轨段的起始位置,off表示变轨段的结束位置。变轨段选择在环形基座的直线段,起始位置和结束位置设置在两个相邻环形基座直线段重合位置处;步骤二:由上位机并行下发轨道指令给各个动子,轨道指令包括维持在现环形基座运行,或是变轨至相邻环形基座运行;步骤三:接收到轨道指令后,各动子根据位置反馈信号确定其实时位置[p1,p2,
…
,p
n
],判断其所处实时位置与所在的环形基座上变轨段起始位置[p1
on
,p2
on
,
…
,pn
on
]的距离;步骤四:对于需要变轨的各动子,当进入变轨段起始位置后,动子电枢绕组上下单元先同时供电,然后将原来运行的环形基座侧的电枢绕组供电单元断电,并由新运行的环形基座侧的电枢绕组进行供电;步骤五:变轨后,各动子将所处新环形基座的实时位置信号反馈至上位机,由上位机监测各动子的运行状态。
技术总结
本发明公开了一种直驱式多轨柔性输送系统及其控制方法。包括环形基座、初级励磁型直线电机、供电模块、功率驱动模块、位置检测模块和无线通讯模块。初级励磁型直线电机包括长定子和多个动子,长定子由多段齿槽结构的铁芯衔接而成并安装于环形基座,动子包含短初级、功率驱动模块、位置检测模块和无线通讯模块。短初级为双边型结构,由非对称结构的永磁体阵列、电枢绕组和初级铁芯构成。供电模块由供电单元和受电单元构成,受电单元安装于各个动子。环形基座由多个组成,动子可在不同环形基座上变轨运行。本发明采用具有高推力密度的初级励磁型直线电机,长定子结构简单且成本低,各动子间可完全独立运行,并在不同环形基座上变轨柔性输送。变轨柔性输送。变轨柔性输送。
技术研发人员:沈燚明 曹彦飞 阎彦 史婷娜 夏长亮
受保护的技术使用者:浙江大学
技术研发日:2021.09.13
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。