1.本实用新型涉及一种智能控制设备技术,尤其是一种垃圾分类自动控制技术,具体地说是一种垃圾分类房自动控制系统。
背景技术:
2.目前,随着人们生活水平的提高、各项消费有所增加,现在个人和家庭每天都会投放出许多垃圾,全面实行垃圾集中分类投放是大势所趋。各住宅、园区等都在设置集中投放点,但如果集中投放点在前沿垃圾桶投满之后不能及时的进行满桶的置换,则后续将会出现垃圾杂乱堆放,带来异味、脏污等环境和卫生问题。
3.对分类垃圾点的垃圾桶进行人为管理,则需要配置专人负责,浪费人力,且不能保证能够时刻及时处理。
4.市面现有垃圾分类房,大多只侧重前沿垃圾桶的摆放,有些偏重可回收垃圾的售卖,未考虑集中点投放垃圾量过多时的自动换桶控制。建立智能的垃圾分类房,配备智能控制系统,可高效的对分类垃圾桶的状态进行实时监测并进行桶的管理,节省了人力成本,避免集中点垃圾堆放杂乱,卫生差等问题。
技术实现要素:
5.本实用新型的目的是针对现有分类垃圾房的垃圾桶不能及时流转及自动化水平低的问题,设计一种基于可编程控制器的分类垃圾房的智能控制系统,可自动检测前沿垃圾投放区分类垃圾桶的状态,通过轨道和机械手完成满桶搬移、空桶补位的操作,保障居民能够正常方便的投放垃圾,并可通过主控单元实现多点数据互联。
6.本实用新型的技术方案是:
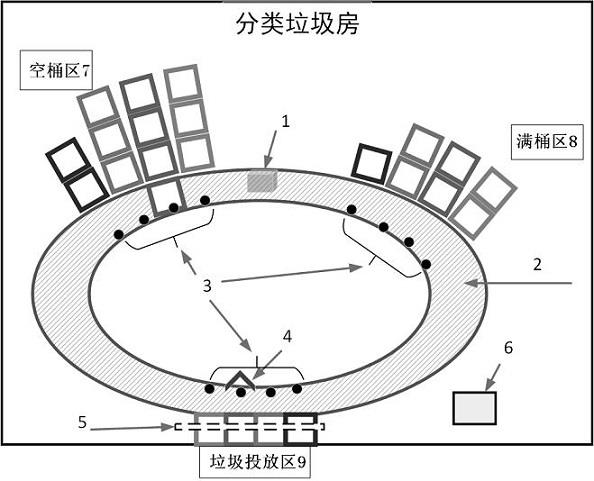
7.一种垃圾分类房自动控制系统,其特征是:它包括轨道驱动电动机1,垃圾桶传送轨道2,三组用于垃圾桶定位的位置开关3,将垃圾桶在轨道与放置点间搬动的机械手4,检测桶是否装满的传感器5,主控单元6;垃圾桶传送轨道2呈环形布置在分类垃圾房内,轨道驱动电动机1驱动垃圾桶传送轨道2上的滚轮转动,垃圾桶在滚轮的带动下在垃圾桶传送轨道2上移动,垃圾桶传送轨道2的外侧设置有垃圾投放区、空桶区和满桶区;位置开关3设置在垃圾投放区、空桶区和满桶区对应位置的垃圾桶传送轨道2上,机械手4安装在垃圾桶传送轨道2上部的移动轨道上,以便移动到垃圾投放区、空桶区和满桶区上方将垃圾桶搬上或搬离垃圾桶传送轨道2;传感器5安装在垃圾投放区一侧以便实时检测垃圾桶中装载的垃圾量并在垃圾量达到上限时及时发送信号给安装在分类垃圾房内的主控单元6,主控单元6与轨道驱动电动机1、位置开关3、机械手4、传感器5电气连接。
8.所述的垃圾桶上设置有透明窗,所述的传感器为光电传感器,光电传感器5能检测到垃圾桶内的垃圾量,以便在垃圾的投放达到上限时发送信号到6。
9.所述的主控单元6包含人机交互屏和放置plc的操作台,它设置有键盘或触摸屏,通过人机交互端选择进行自动或手动控制系统运行。
10.本实用新型的有益效果:
11.本实用新型的分类垃圾房无需专人处理分类桶置换,能够大幅度的减少人力工作的时间和强度;本系统布置整洁,运转工作效率高,能够及时处理满桶问题,减少垃圾乱堆造成的环境问题。
12.本实用新型结构简单,工作可靠,效率高,易于实现。
附图说明
13.图1是本实用新型的分类垃圾房智能控制系统布局图。
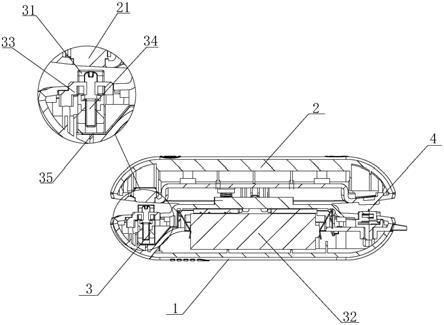
14.图2控制原理结构框图。
15.图中:1是轨道驱动电动机,2是垃圾桶传送轨道,3是位置开关,4是机械手,5是传感器,6是主控单元。
具体实施方式
16.下面结合附图和实施例对本实用新型作进一步的说明。
17.如图1
‑
2所示。
18.一种垃圾分类房自动控制系统,可实现房内分类垃圾桶的自动轮转控制,在垃圾分类房内划出空桶区、满桶区和垃圾投放区,通过轨道和检测控制系统将垃圾投放区已满的垃圾桶关闭并拉回传送至满桶区,再将空的分类垃圾桶运送至前沿垃圾投放区并打开。如图1所示,整个系统包括轨道驱动电动机1,垃圾桶传送轨道2,三组用于垃圾桶定位的位置开关3,将垃圾桶在轨道与放置点间搬动的机械手4,检测桶是否装满的传感器5,主控单元6;垃圾桶传送轨道2呈环形布置在分类垃圾房内,轨道驱动电动机1驱动垃圾桶传送轨道2上的滚轮转动,垃圾桶在滚轮的带动下在垃圾桶传送轨道2上移动,垃圾桶传送轨道2的外侧设置有垃圾投放区、空桶区和满桶区;位置开关3设置在垃圾投放区、空桶区和满桶区对应位置的垃圾桶传送轨道2上,机械手4安装在垃圾桶传送轨道2上部的移动轨道上,以便移动到垃圾投放区、空桶区和满桶区上方将垃圾桶搬上或搬离垃圾桶传送轨道2;传感器5安装在垃圾投放区一侧以便实时检测垃圾桶中装载的垃圾量并在垃圾量达到上限时及时发送信号给安装在分类垃圾房内的主控单元6,主控单元6与轨道驱动电动机1、位置开关3、机械手4、传感器5电气连接。本实用新型使用轨道式传送系统实现分类垃圾桶的传送置换,在垃圾桶被运行至指定的工位点时,轨道停止运行,通过固定在轨道上的机械手实现垃圾桶的搬运。位置开关3在垃圾投放区、空桶区和满桶区的对应工位点处安装,当轨道带动垃圾桶到达位置,即向主控单元发送信号。在垃圾桶上侧设置透明窗,系装于透明窗附近的光电传感器5可以检测到垃圾桶内垃圾量,以便在垃圾的投放达到上限时发送信号到主控单元。主控单元6使用plc控制轨道和机械手的运行,系统同时包含运转指示和故障报警功能,并可进行数据收集、上传、站点通信和远程遥控。主控系统使用键盘或触摸屏,可通过人机交互端选择进行自动或手动控制系统运行。本实用新型的电控原理如图2所示,可采用现有技术自行设计相应的信息采集、控制电路并进行plc编程实现自动控制运行。
19.详述如下:
20.如图1所示,在垃圾分类房内划出空桶区7、满桶区8和垃圾投放区9,安装环形结构的分类垃圾桶传送轨道2,空桶队列后有前推装置推动空桶靠近轨道工位。在主控单元6启
动系统,设置自动运行后,固定于传动轨道的机械手4从空桶区将各类空桶搬运至轨道上,通过轨道驱动电动机1带动轨道运行,将空桶运送至前沿对应工位后轨道停止,机械手搬运分类桶到投放区供市民投放垃圾;传感器5检测到投放区某垃圾桶内垃圾投放满后,轨道运转带动机械手到该满桶后方,机械手将该满桶拉回轨道并传送至满桶区推下轨道摆放至满桶区;之后轨道带动机械手到空桶区夹取对应分类空桶,再经轨道运送至垃圾房前沿并由机械手将其摆放至投放区对应的位置。
21.本实用新型未涉及部分均与现有技术相同或可采用现有技术加以实现。
技术特征:
1.一种垃圾分类房自动控制系统,其特征是:它包括轨道驱动电动机(1),垃圾桶传送轨道(2),三组用于垃圾桶定位的位置开关(3),将垃圾桶在轨道与放置点间搬动的机械手(4),检测桶是否装满的传感器(5),主控单元(6);垃圾桶传送轨道(2)呈环形布置在分类垃圾房内,轨道驱动电动机(1)驱动垃圾桶传送轨道(2)上的滚轮转动,垃圾桶在滚轮的带动下在垃圾桶传送轨道(2)上移动,垃圾桶传送轨道(2)的外侧设置有垃圾投放区、空桶区和满桶区;位置开关(3)设置在垃圾投放区、空桶区和满桶区对应位置的垃圾桶传送轨道(2)上,机械手(4)安装在垃圾桶传送轨道(2)上部的移动轨道上,以便移动到圾投放区、空桶区和满桶区上方将垃圾桶搬上或搬离垃圾桶传送轨道(2);传感器(5)安装在垃圾投放区一侧以便实时检测垃圾桶中装载的垃圾量并在垃圾量达到上限时及时发送信号给安装在分类垃圾房内的主控单元(6),主控单元(6)与轨道驱动电动机(1)、位置开关(3)、机械手(4)、传感器(5)电气连接。2.根据权利要求1所述的垃圾分类房自动控制系统,其特征是:所述的垃圾桶上设置有透明窗,所述的传感器为光电传感器,光电传感器(5)能检测到垃圾桶内的垃圾量,以便在垃圾的投放达到上限时发送信号到主控单元(6)。3.根据权利要求1所述的垃圾分类房自动控制系统,其特征是:所述的主控单元(6)包含人机交互屏和放置plc的操作台,它设置有键盘或触摸屏,通过人机交互端选择进行自动或手动控制系统运行。
技术总结
一种垃圾分类房自动控制系统,其特征是:它包括轨道驱动电动机(1),垃圾桶传送轨道(2),三组用于垃圾桶定位的位置开关(3),将垃圾桶在轨道与放置点间搬动的机械手(4),检测桶是否装满的传感器(5),主控单元(6);垃圾桶传送轨道(2)呈环形布置在分类垃圾房内,轨道驱动电动机(1)驱动垃圾桶传送轨道(2)上的滚轮转动,垃圾桶在滚轮的带动下在垃圾桶传送轨道(2)上移动,垃圾桶传送轨道(2)的外侧设置有垃圾投放区、空桶区和满桶区。本实用新型结构简单,运转效率高。运转效率高。运转效率高。
技术研发人员:王燕萍 富佳文
受保护的技术使用者:东南大学成贤学院
技术研发日:2021.07.05
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。