1.本实用新型涉及焊接设备技术领域,具体是指一种焊接无死角的焊接机器人。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
3.现有的焊接机器人基本都是一个用于焊接的机械臂,其本身可进行焊接的角度有限,无法进行全方位的焊接,更重要的是现有的基本都是机械臂式的,长久使用,由于偏重,很容易造成连接处的松动,从而造成焊接误差,导致工件无法使用。
技术实现要素:
4.本实用新型为了解决上述的各种问题,提供了一种可全方位焊接、焊接过程稳定可靠、焊接无死角的焊接机器人。
5.为解决上述技术问题,本实用新型提供的技术方案为:一种焊接无死角的焊接机器人,包括工作台,定位夹紧工装通过螺栓所述工作台上面,所述工作台下面四角处通过螺栓固定有支撑脚,所述工作台上面四角处一体成型有立柱,所述立柱上面之间一体成型有顶板,相邻所述立柱之间安装有可拆透明防护板,所述顶板上面安装有水平横向移动结构,所述水平横向移动结构穿过所述顶板的另一端上安装有水平纵向移动结构,所述水平横向移动结构和水平纵向移动结构的结构相同,所述水平纵向移动结构伸出端下面通过螺栓固定有转动结构,所述转动结构下端安装有调节结构,所述调节结构伸出端上安装有安装板,所述安装板上通过螺钉固定有焊枪;
6.所述转动结构包括通过螺栓固定于所述水平纵向移动结构伸出端下面的电机,所述电机输出端上通过螺栓连接有转柱,所述调节结构包括转柱下端一体成型有一对支撑板,所述支撑板之间转动有电推杆一,所述转柱一侧面上铰接有电推杆二,所述电推杆二的另一端与所述电推杆一的尾端相铰接,所述安装板通过螺栓固定在所述电推杆一的伸出端上。
7.作为改进,所述水平横向移动结构包括通过螺栓固定于所述顶板上面的防护壳,所述顶板上面一侧边前后端处且位于所述防护壳内安装有电机二,另一侧边处通过螺栓固定有板件,所述电机二输出端上连接有螺杆,所述螺杆另一端与所述板件转动连接,所述两个所述螺杆之间螺纹连接有移动块,所述顶板上开有条状通孔,所述移动块伸出所述条状通孔的另一端上一体成型有安装板二,所述水平纵向移动结构通过螺栓固定在所述安装板二下面。
8.作为改进,所述电机外侧面上一体成型有圆环,所述圆环上面且套于所述电机外侧设有转筒,所述转筒下面通过螺栓盖有筒盖,所述转柱穿过所述筒盖进行设置。
9.作为改进,所述电推杆一上一体成型有滑槽,所述安装板于所述滑槽内进行滑动。
10.作为改进,所述转柱上一体成型有挡环,所述挡环下面与所述筒盖上面相接触。
11.本实用新型与现有技术相比的优点在于:本实用新型在使用时,水平横向移动结
构和水平纵向移动结构的设置,可使本实用新型在焊接时,进行水平面的横向和纵向运动;转动结构的设置,可使本实用新型在进行拐角焊接时,运动较为稳定可靠,从而实现全方位的无死角焊接;调节结构的设置,可针对不同高度待焊接件进行焊接,适用范围较广;本实用新型整体呈框架吊焊结构,焊接过程稳定可靠,不会因为长久偏重,造成部件连接处的松动。
附图说明
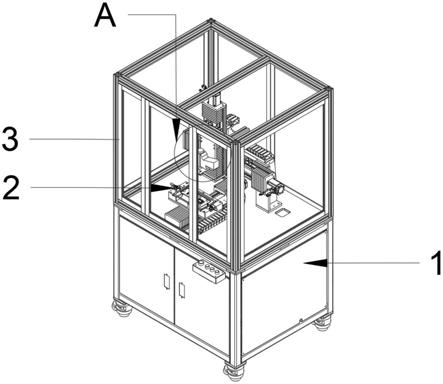
12.图1是本实用新型一种焊接无死角的焊接机器人的整体框架立体结构示意图。
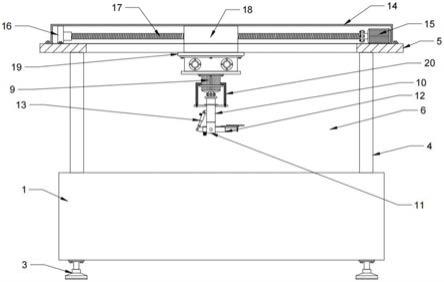
13.图2是本实用新型一种焊接无死角的焊接机器人的主视结构示意图。
14.图3是本实用新型一种焊接无死角的焊接机器人的右视结构示意图。
15.图4是本实用新型一种焊接无死角的焊接机器人的转动结构和调节结构的结构示意图。
16.如图所示:1、工作台;2、挡环;3、支撑脚;4、立柱;5、顶板;6、可拆透明防护板;7、安装板;8、焊枪;9、电机;10、转柱;11、支撑板;12、电推杆一;13、电推杆二;14、防护壳;15、电机二;16、板件;17、螺杆;18、移动块;19、安装板二;20、转筒;21、筒盖;22、滑槽。
具体实施方式
17.下面结合附图对本实用新型做进一步的详细说明。
18.结合附图1至附图4,一种焊接无死角的焊接机器人,包括工作台1,定位夹紧工装通过螺栓工作台1上面,工作台1下面四角处通过螺栓固定有支撑脚3,工作台1上面四角处一体成型有立柱4,顶板5一体成型在立柱4上面,相邻立柱4之间安装有可拆透明防护板6,水平横向移动结构安装在顶板5上面,水平横向移动结构穿过顶板5的另一端上安装有水平纵向移动结构,其二者结构相同,水平纵向移动结构伸出端下面通过螺栓固定有转动结构,转动结构下端安装有调节结构,调节结构伸出端上安装有安装板7,安装板7上通过螺钉固定有焊枪8;
19.转动结构包括通过螺栓固定于水平纵向移动结构伸出端下面的电机9,电机9输出端上通过螺栓连接有转柱10,调节结构包括转柱10下端一体成型有一对支撑板11,支撑板11之间转动有电推杆一12,转柱10一侧面上铰接有电推杆二13,电推杆二13的另一端与电推杆一12的尾端相铰接,安装板7通过螺栓固定在电推杆一12的伸出端上。
20.水平横向移动结构包括通过螺栓固定于顶板5上面的防护壳14,顶板5上面一侧边前后端处且位于防护壳14内安装有电机二15,另一侧边处通过螺栓固定有板件16,电机二15输出端上连接有螺杆17,螺杆17另一端与板件16转动连接,两个螺杆17之间螺纹连接有移动块18,顶板5上开有条状通孔,移动块18伸出条状通孔的另一端上一体成型有安装板二19,水平纵向移动结构通过螺栓固定在安装板二19下面。
21.电机9外侧面上一体成型有圆环,圆环上面且套于电机9外侧设有转筒20,转筒20下面通过螺栓盖有筒盖21,转柱10穿过筒盖21进行设置。
22.电推杆一12上一体成型有滑槽22,安装板7于滑槽22内进行滑动。
23.转柱10上一体成型有挡环2,挡环2下面与筒盖21上面相接触。
24.本实用新型的具体实施方式:本实用新型在使用时,可首先将工装固定在工作台1
上,然后将待焊接件通过工装进行固定夹紧,随后可通过控制按钮(图上未画出)控制电机二15转动,带动螺杆17转动,进而带动移动块18水平横向移动,实现焊枪8水平横向的运动;水平纵向移动结构与水平横向移动结构结构相同,只是空间垂直,其运动方式相同,可实现焊枪8水平纵向的运动,当焊枪8焊接至拐角处,可通过电机9(步进电机)的转动,带动焊枪8进行角度的转动,通过电推杆二13的伸缩,可进行焊枪8垂直面角度的调整;通过电推杆一12的伸缩,可调整焊枪8焊接高度的不同,从而可适用于不同高度待焊接件的焊接。
25.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.一种焊接无死角的焊接机器人,包括工作台(1),定位夹紧工装通过螺栓所述工作台(1)上面,所述工作台(1)下面四角处通过螺栓固定有支撑脚(3),其特征在于:所述工作台(1)上面四角处一体成型有立柱(4),所述立柱(4)上面之间一体成型有顶板(5),相邻所述立柱(4)之间安装有可拆透明防护板(6),所述顶板(5)上面安装有水平横向移动结构,所述水平横向移动结构穿过所述顶板(5)的另一端上安装有水平纵向移动结构,所述水平横向移动结构和水平纵向移动结构的结构相同,所述水平纵向移动结构伸出端下面通过螺栓固定有转动结构,所述转动结构下端安装有调节结构,所述调节结构伸出端上安装有安装板(7),所述安装板(7)上通过螺钉固定有焊枪(8);所述转动结构包括通过螺栓固定于所述水平纵向移动结构伸出端下面的电机(9),所述电机(9)输出端上通过螺栓连接有转柱(10),所述调节结构包括转柱(10)下端一体成型有一对支撑板(11),所述支撑板(11)之间转动有电推杆一(12),所述转柱(10)一侧面上铰接有电推杆二(13),所述电推杆二(13)的另一端与所述电推杆一(12)的尾端相铰接,所述安装板(7)通过螺栓固定在所述电推杆一(12)的伸出端上。2.根据权利要求1所述的一种焊接无死角的焊接机器人,其特征在于:所述水平横向移动结构包括通过螺栓固定于所述顶板(5)上面的防护壳(14),所述顶板(5)上面一侧边前后端处且位于所述防护壳(14)内安装有电机二(15),另一侧边处通过螺栓固定有板件(16),所述电机二(15)输出端上连接有螺杆(17),所述螺杆(17)另一端与所述板件(16)转动连接,所述两个所述螺杆(17)之间螺纹连接有移动块(18),所述顶板(5)上开有条状通孔,所述移动块(18)伸出所述条状通孔的另一端上一体成型有安装板二(19),所述水平纵向移动结构通过螺栓固定在所述安装板二(19)下面。3.根据权利要求1所述的一种焊接无死角的焊接机器人,其特征在于:所述电机(9)外侧面上一体成型有圆环,所述圆环上面且套于所述电机(9)外侧设有转筒(20),所述转筒(20)下面通过螺栓盖有筒盖(21),所述转柱(10)穿过所述筒盖(21)进行设置。4.根据权利要求1所述的一种焊接无死角的焊接机器人,其特征在于:所述电推杆一(12)上一体成型有滑槽(22),所述安装板(7)于所述滑槽(22)内进行滑动。5.根据权利要求3所述的一种焊接无死角的焊接机器人,其特征在于:所述转柱(10)上一体成型有挡环(2),所述挡环(2)下面与所述筒盖(21)上面相接触。
技术总结
本实用新型公开了一种焊接无死角的焊接机器人,包括工作台,定位夹紧工装通过螺栓工作台上面,工作台下面四角处通过螺栓固定有支撑脚,工作台上面四角处一体成型有立柱,立柱上面之间一体成型有顶板,相邻立柱之间安装有可拆透明防护板,顶板上面安装有水平横向移动结构,水平横向移动结构穿过顶板的另一端上安装有水平纵向移动结构,水平横向移动结构和水平纵向移动结构的结构相同,水平纵向移动结构伸出端下面通过螺栓固定有转动结构,转动结构下端安装有调节结构,调节结构伸出端上安装有安装板,安装板上通过螺钉固定有焊枪。本实用新型的优点:可全方位焊接、焊接过程稳定可靠、焊接无死角。焊接无死角。焊接无死角。
技术研发人员:梁飞 黄志智 覃俊伟 郑传唠 莫宝海 关钧文
受保护的技术使用者:柳州市灿晟机械设备有限公司
技术研发日:2021.07.05
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。