1.本实用新型涉及起重机制造领域,尤其是涉及一种多维度可调自动焊接装置。
背景技术:
2.在起重机制造领域,构件的体积大,焊接的工作量大、质量要求高。由于现有的焊接机器人都是固定的,其运动行程是有限的,而构件很长很重、不能移动,因此很多部位还需要人工焊接。人工焊接不但劳动强度大、质量不稳定,而且容易产生焊接缺陷。
3.为了提高焊接的自动化,需要一种能够在现场灵活配置的、便于调整焊枪的焊接装置。
技术实现要素:
4.为了克服背景技术中的不足,本实用新型公开了一种多维度可调自动焊接装置,采用如下技术方案:
5.一种多维度可调自动焊接装置,包括安装在基体上的z向伺服运动机构、随z向伺服运动机构垂直移动的x向伺服运动机构,其中,x向伺服运动机构包括横移臂,在横移臂的一端连接有焊枪架;所述基体呈立柱状,在基体的底部安装有四个万向轮;在横移臂上设有沿x向设置的滑槽,在焊枪架上设有与滑槽滑动配合连接的滑块;所述焊枪架包括与滑块连接的滑套,还包括位于滑套内,沿z向滑动或转动的滑轴,在滑轴的一端固连有摆动器,在摆动器的输出端连接有固定夹,固定夹用来夹持焊枪。
6.进一步地改进技术方案,在基体的底部还螺接有多个支地螺栓,支地螺栓用于举升基体,使万向轮悬空。
7.进一步地改进技术方案,所述固定夹包括杆部和位于杆部一端的夹持部,夹持部用来夹持焊枪;所述摆动器的输出端设有抱夹,抱夹用来抱夹固定夹的杆部。
8.进一步地改进技术方案,在滑套上螺接有紧定螺钉,紧定螺钉用来顶紧滑轴。
9.由于采用上述技术方案,相比背景技术,本实用新型具有如下有益效果:
10.本实用新型具有冗余的自由度,在不上电的情况下,便可快速实现焊枪在复杂空间内的位置调整。
11.本实用新型还能够在焊接现场内灵活移动,并相对于工件进行坐标定位,以快速建立自动焊接所需坐标系。
附图说明
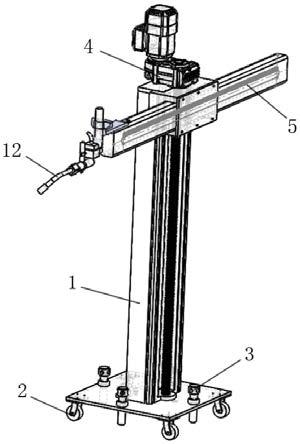
12.图1为本实用新型的结构示意图。
13.图2为焊枪架的结构示意图。
14.图中:1、基体;2、万向轮;3、支地螺栓;4、z向伺服运动机构;5、横移臂;6、滑块;7、滑套;8、滑轴;9、紧定螺钉;10、摆动器;11、固定夹;12、焊枪。
具体实施方式
15.下面参照附图来描述本实用新型的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本实用新型的技术原理,并非旨在限制本实用新型的保护范围。需要说明的是,在本实用新型的描述中,术语“前”、“后”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
16.一种多维度可调自动焊接装置,包括基体,在基体上安装有z向伺服运动机构4,z向伺服运动机构4包括由伺服电机驱动的丝杠和十字滑块。x向伺服运动机构连接在十字滑块上,随十字滑块沿垂直方向移动。x向伺服运动机构包括横移臂5,横移臂5与十字滑块滑动配合,沿x向移动。在横移臂5的一端连接有焊枪架,焊枪架用于安装焊枪12。
17.为了解决背景技术中的问题,如图1所示,基体呈立柱状,在基体的底部安装有四个万向轮2,这样方便本焊接装置在焊接现场的灵活移动,也便于本焊接装置相对于构件的焊缝进行x向和z向的坐标定位。在基体的底部还螺接有四个支地螺栓3,支地螺栓3用于举升基体,使万向轮2悬空。当本焊接装置调整到位后,通过支地螺栓3的支地,使本焊接装置不再移动。
18.如图2所示,在横移臂5的一端设有沿x向设置的燕尾槽,在焊枪架上设有与燕尾槽滑动配合连接的滑块6,滑块6与横移臂5的相对滑动,使焊枪架具有沿x向的调整自由度。焊枪架包括与滑块6连接的滑套7,还包括位于滑套7内的滑轴8,滑轴8在滑套7内既有沿z向滑动的自由度,也有沿z向转动的自由度。在滑套7上螺接有紧定螺钉9,当滑轴8调整到位后,紧定螺钉9用来顶紧滑轴8,锁死滑轴8的自由度。
19.在滑轴8的一端固连有摆动器10,摆动器10由步进电机驱动,能够使焊枪12沿水平方向产生小幅度的往复摆动,这样有助于提高焊缝的质量。在摆动器10的输出端连接有固定夹11,固定夹11用来夹持焊枪12。固定夹11包括杆部和位于杆部一端的夹持部,夹持部用来夹持焊枪12。摆动器10的输出端设有抱夹,抱夹用来抱夹固定夹11的杆部。这样使焊枪12多出了两个转动自由度。
20.由上可知,除了x向、z向的两个伺服运动的自由度之外,焊枪12又多出了至少一个x、z向的平移调整自由度和转动调整自由度。这样,冗余的自由度便于焊枪12在复杂空间内的位置调整。当本焊接装置定位时,不需要上电,不断移动基体,使焊枪12贴近构件的x向或z向焊缝往复移动,当焊枪12与焊缝的距离保持恒定时,即可完成本焊接装置相对于构件的坐标定位,然后便可以对构件实施自动焊接。
21.本实用新型未详述部分为现有技术。尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的保护范围由所附权利要求及其等同物限定。
技术特征:
1.一种多维度可调自动焊接装置,包括安装在基体上的z向伺服运动机构、随z向伺服运动机构垂直移动的x向伺服运动机构,其中,x向伺服运动机构包括横移臂,在横移臂的一端连接有焊枪架,其特征是:所述基体呈立柱状,在基体的底部安装有四个万向轮;在横移臂上设有沿x向设置的滑槽,在焊枪架上设有与滑槽滑动配合连接的滑块;所述焊枪架包括与滑块连接的滑套,还包括位于滑套内,沿z向滑动或转动的滑轴,在滑轴的一端固连有摆动器,在摆动器的输出端连接有固定夹,固定夹用来夹持焊枪。2.如权利要求1所述的一种多维度可调自动焊接装置,其特征是:在基体的底部还螺接有多个支地螺栓,支地螺栓用于举升基体,使万向轮悬空。3.如权利要求1所述的一种多维度可调自动焊接装置,其特征是:所述固定夹包括杆部和位于杆部一端的夹持部,夹持部用来夹持焊枪;所述摆动器的输出端设有抱夹,抱夹用来抱夹固定夹的杆部。4.如权利要求1所述的一种多维度可调自动焊接装置,其特征是:在滑套上螺接有紧定螺钉,紧定螺钉用来顶紧滑轴。
技术总结
一种多维度可调自动焊接装置,包括安装在基体上的Z向伺服运动机构、随Z向伺服运动机构垂直移动的X向伺服运动机构,其中,X向伺服运动机构包括横移臂,在横移臂的一端连接有焊枪架;所述基体呈立柱状,在基体的底部安装有四个万向轮;在横移臂上设有沿X向设置的滑槽,在焊枪架上设有与滑槽滑动配合连接的滑块;所述焊枪架包括与滑块连接的滑套和滑轴,在滑轴的一端固连有摆动器,在摆动器的输出端连接有焊枪。本实用新型具有冗余的自由度,在不上电的情况下,便可快速实现焊枪在复杂空间内的位置调整。本实用新型还能够在焊接现场内灵活移动,并相对于工件进行坐标定位,以快速建立自动焊接所需坐标系。动焊接所需坐标系。动焊接所需坐标系。
技术研发人员:吴庆富 刘永刚 吴庆宁 李静宇 师文科 周海燕 翟鹏宇
受保护的技术使用者:河南卫华重型机械股份有限公司
技术研发日:2021.09.28
技术公布日:2021/11/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。