1.本发明涉及雷达探测领域,特别是涉及一种可编程智能反射面辅助的雷达探测方法及装置。
背景技术:
2.在虚拟现实,无人驾驶等应用的需求推动下,定位和感知成为未来无线网络的重要功能。在众多的定位和传感技术中,雷达由于其成本和性能上的优势,受到了人们越来越多的关注,具体而言,随着rf cmos和多输入多输出(multiple
‑
input multiple
‑
output,mimo)技术的发展,雷达的成本越来越低。雷达还可以直接通过多普勒效应获得目标的速度,对于自动驾驶特别适用。然而,现有的雷达探测系统被动接受雷达和目标之间的传播信道,当信道条件不好时,雷达信号的衰减会非常厉害,使得雷达探测的性能下降,所以现在急需一种传播信道可以被调控的雷达。
技术实现要素:
3.本发明的目的是提供一种可编程智能反射面辅助的雷达探测方法及装置,可以优化雷达天线和目标之间的传播信道,减小信号的衰减,从而提升雷达探测性能。
4.为实现上述目的,本发明提供了如下方案:
5.一种可编程智能反射面辅助的雷达探测方法,包括:
6.在当前周期,根据各组合方案的相对距离和在当前周期内分别以各组合方案为探测结果时各组合结果的先验概率,得到当前周期的优化参数,所述优化参数包括发射波形和反射面的配置;所述组合方案包括所有探测目标所在的目标方向;一个所述探测目标在一个组合方案中对应一个目标方向;
7.基于当前周期的优化参数得到当前周期的实际接收信号;
8.基于各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号确定探测结果。
9.可选的,所述基于各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号确定探测结果,具体包括:
10.根据各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号得到在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率;
11.判断所述当前周期是否为预设周期,得到第一判断结果;
12.若所述第一判断结果为是,则确定目标先验概率对应的所述组合方案为探测结果;所述目标先验概率为在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率中最大的先验概率;
13.若所述第一判断结果为否,则更新周期次数进入下一周期。
14.可选的,所述根据各组合方案的相对距离和在当前周期内分别以各组合方案为探
测结果时各组合结果的先验概率,得到当前周期的优化参数,具体为:
15.在当前周期内以第一乘积之和最大为目标得到当前周期的优化参数;所述第一乘积为各组合方案的相对距离和以各组合方案为探测结果时各组合方案的先验概率的乘积。
16.一种可编程智能反射面辅助的雷达探测装置,包括:信号发射单元、控制器和均与所述控制器连接的信号接收单元和可编程智能反射面;所述信号发射单元用于发射雷达信号,所述可编程智能反射面用于将所述雷达信号反射至探测目标,并将经探测目标反射的雷达信号反射至所述信号接收单元;所述控制器用于根据所述信号接收单元接收的雷达信号控制所述可编程智能反射面的配置。
17.可选的,所述信号发射单元包括:发射器和发射天线阵列;所述发射器用于生成雷达波形;所述发射天线阵列用于发射所述发射器生成的雷达信号
18.可选的,所述信号接收单元包括:接收器和接收天线阵列;所述接收天线阵列用于接收反射信号,所述接收器用于处理所述接收天线阵列接收的反射信号。
19.可选的,所述控制器包括:
20.优化参数确定模块,用于在当前周期,根据各组合方案的相对距离和在当前周期内分别以各组合方案为探测结果时各组合结果的先验概率,得到当前周期的优化参数,所述优化参数包括发射波形和反射面的配置;所述组合方案包括所有探测目标所在的目标方向;一个所述探测目标在一个组合方案中对应一个目标方向;
21.实际接收信号确定模块,用于基于当前周期的优化参数得到当前周期的实际接收信号;
22.探测结果确定模块,用于基于各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号确定探测结果。
23.可选的,所述探测结果确定模块包括:
24.先验概率确定单元,用于根据各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号得到在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率;
25.判断单元,用于判断所述当前周期是否为预设周期,得到第一判断结果;
26.探测结果确定单元,用于若所述第一判断结果为是,则确定目标先验概率对应的所述组合方案为探测结果;所述目标先验概率为在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率中最大的先验概率;
27.更新单元,用于若所述第一判断结果为否,则更新周期次数进入下一周期。
28.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明通过改变反射面的配置来控制反射信道,从而优化雷达和目标之间的信道条件,进而有效提高雷达探测性能。
附图说明
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
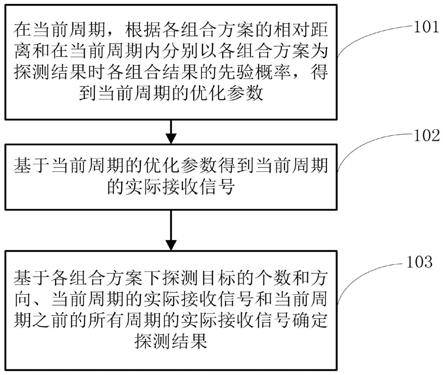
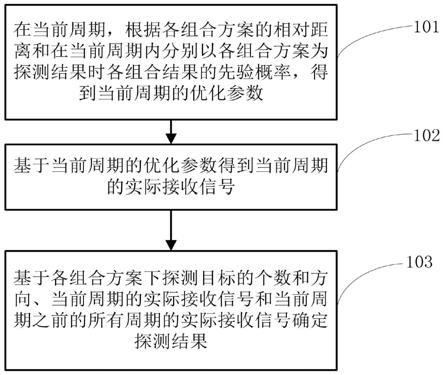
30.图1为本发明实施例提供的雷达探测方法的流程图;
31.图2为本发明实施例提供的雷达探测装置发射信号的示意图;
32.图3为本发明实施例提供的雷达探测装置的接收信号的示意图。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.本实施例提供的雷达探测方法的整体思想为:首先假设每个目标可能处在这i个方向中的某一个方向上,其中θ指方位角,指俯仰角,对于k个目标和i个方向进行排列组合可以得到中结果,又因为k的取值范围为[0,1,
…
,k
m
],所以一共有种可能的组合结果,每种组合结果对应一种目标个数和所处的方向,确定了哪种结果是正确的,也就意味着完成了雷达探测。为了判断哪种结果是正确的,采用假设检验的方法,具体来说,首先建立j个假设(组合结果),初始时,假设第j个假设(u
j
)的预设先验概率为p0(u
j
),之后我们通过分析雷达接收信号来不断更新每个假设的先验概率,最终先验概率最大的假设被认定为雷达探测的结果。
[0036]
探测流程包含c个周期,每个周期分别进行优化、发射、接收和探测四个步骤。当所有周期结束后,最终先验概率最大的假设会被认定为雷达探测的结果。
[0037]
如图1所示,所述雷达探测方法具体过程如下:
[0038]
步骤101:在当前周期,根据各组合方案的相对距离和在当前周期内分别以各组合方案为探测结果时各组合结果的先验概率,得到当前周期的优化参数。所述优化参数包括发射波形和反射面的配置;所述组合方案包括所有探测目标所在的目标方向;一个所述探测目标在一个组合方案中对应一个目标方向。
[0039]
步骤102:基于当前周期的优化参数得到当前周期的实际接收信号。
[0040]
步骤103:基于各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号确定探测结果。
[0041]
在实际应用中,步骤103具体包括:
[0042]
根据各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号得到在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率。
[0043]
判断所述当前周期是否为预设周期,得到第一判断结果。
[0044]
若所述第一判断结果为是,则确定目标先验概率对应的所述组合方案为探测结果;所述目标先验概率为在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率中最大的先验概率。
[0045]
若所述第一判断结果为否,则更新周期次数进入下一周期。
[0046]
在实际应用中,第一个周期不优化,使用随机的波形和配置。
[0047]
在实际应用中,步骤101具体为:
[0048]
根据公式计算当前周期的优化参数,其中,p
c
(u
j
)表示在第c个周期u
j
为探测结果时u
j
的先验概率,p
c
(u
j
′
)表示在第c个周期u
j
′
为探测结果时u
j
′
的先验概率,d(u
j
,u
j
′
,w
c
,s
t,c
,s
r,c
)表示u
j
与u
j
′
的相对距离,u
j
表示第j个组合方案,u
j
′
表示第j
′
个组合方案,w
c
表示第c周期的发射波形,第n行表示第n个天线的发射波形,s
t,c
表示第c周期发射阶段反射面的配置,s
r,c
表示第c周期接收阶段反射面的配置,j表示组合方案的总数量,和和表示第c周期第m个可编程智能反射面在发射阶段的配置,表示第c周期第m个可编程智能反射面在接收阶段的配置,这是一个非凸优化问题,可以用梯度下降等算法进行求解。也可以对目标函数进行适当变形降低求解难度,这里不再赘述。
[0049]
在实际应用中,
[0050]
d(u
j
,u
j
′
,w
c
,s
t,c
,s
r,c
)=d(p
c 1
(y|u
j
),p
c 1
(y|u
j
′
),w
c
,s
t,c
,s
r,c
) d(p
c 1
(y|u
j
′
),p
c 1
(y|u
j
),w
c
,s
t,c
,s
r,c
),其中,相对熵d(p
c 1
(y|u
j
),p
c 1
(y|u
j
′
),w
c
,s
t,c
,s
r,c
)表示当第c周期的发射波形和可编程智能反射面配置取w
c
,s
t,c
,s
r,c
时,函数p
c 1
(y|u
j
)到函数p
c 1
(y|u
j
′
)之间的距离(y的含义是每个方案下接收到的信号波形),相对熵d(p
c 1
(y|u
j
),p
c 1
(y|u
j
′
),w
c
,s
t,c
,s
r,c
)表示当第c周期的发射波形和可编程智能反射面配置取w
c
,s
t,c
,s
r,c
时,函数p
c 1
(y|u
j
′
)到函数p
c 1
(y|u
j
)的距离,距离越大,这两个函数就越好区分,因此雷达性能就更好,p
c 1
(y|u
j
)表示u
j
为探测结果时在第c 1周期下接收到y的概率,y表示任意的无线信号,p
c 1
(y|u
j
′
)表示u
j
′
为探测结果时在第c 1周期下接收到y的概率。考虑到对称性,我们定义假设u
j
和u
j
′
之间的相对距离为d(u
j
,u
j
′
,w
c
,s
t,c
,s
r,c
),整个优化问题的目标可以表述为最大化每两个假设之间的相对距离的加权和。
[0051]
在实际应用中,假设有k个目标,所处的方向分别为那么每个目标对应方向的发射信号可以表示为:y
t,c
=(b(s
t,c
) ξ)w
c
,其中y
t,c
表示发射信号,第k行表示方向的发射信号,b(s
t,c
)表示在可编程智能反射面配置为s
t,c
时,从天线阵到目标处的反射径增益。ξ表示从天线阵到目标处的直射径增益,步骤102具体为:
[0052]
根据公式得到当前周期的实际接收信号,其中y
c
表示第c周期的实际接收信号,y
c
的第n行表示天线n接收到的信号,γ
k
表示第k个方向的反射率,为b
k
(s
r,c
)的转置矩阵,b
k
(s
r,c
)表示矩阵b(s
r,c
)的第k行,b(s
r,c
)表示在反射面的配置为s
r,c
时从天线阵到目标处的反射径增益,为ξ
k
的转置矩阵,ξ
k
是矩阵ξ的第k行,ξ表示从天线阵到目标处的直射径增益矩阵,b
k
(s
t,c
)是矩阵b(s
t,c
)的第k行,b(s
t,c
)表示在反射面配置为s
t,c
时从天线阵到目标处的反射径增益,w
c
表示当前周期的发射波形,j
k
表示时延矩阵,用于描述信号经过第k个目标的路径的造成的时延,v
c
表示噪声和干扰矩阵,表示热噪声和环境的影响,s
t,c
表示第c周期发射阶段反射面的
配置,s
r,c
表示第c周期接收阶段反射面的配置。
[0053]
在实际应用中,所述根据各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号得到在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率,具体为:
[0054]
根据公式计算在下一周期所述组合方案为探测结果时所述组合方案的先验概率,其中,p
c 1
(u
j
)表示在第c 1周期u
j
为探测结果时u
j
的先验概率,p0(u
j
)表示u
j
的预设先验概率,p
(c)
(y
(c)
|u
j
)表示u
j
为探测结果时接收到的信号为y
(c)
的概率,y
(c)
表示在1到c周期下的实际接收信号,j表示组合方案的总数量。
[0055]
在实际应用中,第1周期一直到第c周期接收到信号(y1,
…
,y
c
)的概率可以表示为其中u
j
为探测结果时接收到的信号为y
(c)
的概率的计算过程具体为:
[0056]
其中,y
(c)
表示在1到c周期下的实际接收信号,表示1到c周期k个方向的反射率,表示1到c周期所有目标与雷达的距离值,这一项会决定时延矩阵j
k
,表示已知假设u
j
成立,已知反射率和距离为和时,y
i
的概率,y
i
表示第i个周期的实际接收信号。
[0057]
本实施例还提供了一种可编程智能反射面辅助的雷达探测装置,所述装置包括:信号发射单元、控制器和均与所述控制器连接的信号接收单元和可编程智能反射面;所述信号发射单元用于发射雷达信号,所述可编程智能反射面用于将所述雷达信号反射至探测目标,并将经探测目标反射的雷达信号反射至所述信号接收单元;所述控制器用于根据所述信号接收单元接收的雷达信号控制所述可编程智能反射面的配置。可编程智能反射面是一种平面材料,由许多亚波长大小的反射单元拼接而成,每个单元的相移可调,每个反射单元的反射系数可以通过施加不同的偏置电压来调节,因此整个反射面的反射系数(下称配置)是可以编程控制的那么经过可编程反射面的反射信道的特性也可以被控制。
[0058]
作为一种可选的实施方式,所述信号发射单元包括:发射器和发射天线阵列;所述发射器用于生成雷达波形;所述发射天线阵列用于发射所述发射器生成的雷达信号
[0059]
作为一种可选的实施方式,所述信号接收单元包括:接收器和接收天线阵列;所述接收天线阵列用于接收反射信号,所述接收器用于处理所述接收天线阵列接收的反射信号。
[0060]
作为一种可选的实施方式,所述控制器包括:
[0061]
优化参数确定模块,用于在当前周期,根据各组合方案的相对距离和在当前周期内分别以各组合方案为探测结果时各组合结果的先验概率,得到当前周期的优化参数,所述优化参数包括发射波形和反射面的配置;所述组合方案包括所有探测目标所在的目标方向;一个所述探测目标在一个组合方案中对应一个目标方向;
[0062]
实际接收信号确定模块,用于基于当前周期的优化参数得到当前周期的实际接收
信号;
[0063]
探测结果确定模块,用于基于各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号确定探测结果。
[0064]
在实际应用中,所述探测结果确定模块包括:
[0065]
先验概率确定单元,用于根据各组合方案下探测目标的个数和方向、当前周期的实际接收信号和当前周期之前的所有周期的实际接收信号得到在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率;
[0066]
判断单元,用于判断所述当前周期是否为预设周期,得到第一判断结果;
[0067]
探测结果确定单元,用于若所述第一判断结果为是,则确定目标先验概率对应的所述组合方案为探测结果;所述目标先验概率为在下一周期内分别以各组合方案为探测结果时各组合方案的先验概率中最大的先验概率;
[0068]
更新单元,用于若所述第一判断结果为否,则更新周期次数进入下一周期。
[0069]
本装置的工作原理如图2和图3所示:
[0070]
雷达有两种工作模式,发射模式和接收模式。在发射模式,发射器生成波形并设计可编程智能反射面的配置,雷达波形会通过发射天线阵列发射出去,之后雷达会立即转变到接收模式,发射信号通过反射径和直射径到达目标处,被目标反射后成为回波信号(实际接收信号)。回波信号会被接收天线阵列接收,并传给接收器进行处理从而对目标进行探测,也就是判断目标的个数和方向,图中天线阵包括发射天线阵列和接收天线阵列,ris为可编程智能反射面。
[0071]
本发明的技术效果如下:
[0072]
1、现有的雷达探测系统被动接受雷达和目标之间的传播信道,当信道条件不好时,雷达信号的衰减会非常厉害,使得雷达探测的性能下降,因为可编程智能反射面是一种平面材料,因此通过合适的设计可编程反射面反射单元的相移,我们可以优化雷达天线和目标之间的传播信道,减小信号的衰减,从而提升雷达探测性能。
[0073]
2、雷达探测方法通过优化雷达波形和可编程智能反射面的配置使得雷达探测的性能最大化。
[0074]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0075]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。