1.本发明涉及触感再现技术领域,具体地说是一种粗糙触感复现装置及方法和基于粗糙触感的网购方法。
背景技术:
2.物体的触感复现对于远程消费购物、改善盲人或视弱者生活以及遥操作机器人领域有重要意义。现如今人们远程选购服装主要是根据眼睛看到的服装图片和一些特性数据,判断其舒适性。因为图片拍摄的角度、光线差异以及服装特性数据无法量化的问题,实际的服装触感往往与主观判断的触感有很大的出入。在日常生活中,盲人或弱视者主要是根据触觉感知周围的环境,通过远程的物体触感复现装置复现远处环境里物体触感,可以改善其生活。在一些特殊情况下,如灾害救援现场、人类极限环境等,需要机器人代替人类完成作业工作,但是控制机器人完成工作的操作精度要求高。而通过复现机器人执行器末端的物体的触感特征,可提高操作人员的控制精度。因此,对物体粗糙等触感的再现研究就显得格外具有意义。
3.就目前国内外对于物体粗糙触感复现采用的振动法、变摩檫力法、电刺激法来看,振动法通过改变振动元件的振幅和频率,振幅和频率分别对应粗糙感的复现元素,即纹理高度和元素间距,从而复现物体粗糙感,但是复现的触感质感较为单一;变摩擦力法通过时时改变人体与触觉接口接触处的摩擦力大小,复现物体的粗糙感,但仅有切向方向的触觉反馈且需要的接触面积较大;电刺激法通过微弱电流直接刺激皮肤下的触觉感受器,控制电流的大小和频率,模拟生物电流,复现粗糙感,但易引起刺痛感具有一定的危险性,对电流的控制要求严格。现有的物体粗糙触感复现方法比较单一,多以改变力和振动变化为基础。没有结合多种复现方法,没有从改变力和振动变化外的方法上综合地再现物体粗糙触感。
4.中国专利cn 101819462a公开了一种用于虚拟现实人机交互的基于力/触觉交互设备的力触觉再现系统,根据图像处理方法得到接触点物体纹理的表面高度和动摩擦系数,建立接触力及摩擦力模型模型,最后通过力/触觉交互设备将纹理接触力实时反馈给操作者,实现力触觉表达和再现。
5.中国专利cn 111338471a公开了一种融合静电力、空气压膜和机械振动的触觉再现方法与装置,根据静电力和空气压膜原理,改变摩擦力,根据机械振动改变法向力反馈,进一步通过建立图像梯度、曲率和高度特征与触觉驱动信号参数之间的映射模型实现物体轮廓、纹理和粗糙度的同时触觉再现。
6.中国专利 cn 111813259a公开了一种触摸屏用指套式力触觉装置及其反馈控制办法,通过直流电机及压电致动器改变手指指腹法向力、侧向力及振动触觉反馈,能够在触摸屏上再现虚拟物体表面的硬度、摩擦和粗糙度等特征。
7.上述方法通过改变力和振动变化作为触感复现的基础,但复现的粗糙感有失准确性,也不能实现感知粗糙感的动态变化。
技术实现要素:
8.有鉴于此,本发明针对上述现有技术存在的无法准确复现粗糙触感的技术问题,提供了一种能准确复现粗糙触感的装置及方法及基于粗糙触感的网购方法。
9.本发明的技术解决方案是,提供一种以下结构的粗糙触感复现装置,种粗糙触感复现装置,包括振动马达、承载板、电致伸缩材料、光纤传感器、光纤变送器、监测仪、电源和光源,所述承载板置于振动马达上方并与振动马达的振动点紧贴,所述电致伸缩材料覆盖于承载板上表面,所述光纤传感器和光纤变送器均置于电致伸缩材料内部,所述光纤变送器与光纤传感器相接触,所述光纤变送器采集所述光纤传感器的中心波长数据传入所述监测仪,所述电源经监测仪向所述光纤变送器、振动马达和电致伸缩材料供电,所述承载板配置有用于使光纤传感器受光的光源。
10.可选的,根据粗糙触感特性值,设定所述振动马达的初始电流强度以及电致伸缩材料的初始电流强度,所述光纤传感器的中心波长数据表征所述电致伸缩材料的状态变化,在所述电致伸缩材料上表面复现出所述粗糙触感特性值对应的粗糙触感。
11.可选的,所述光纤变送器实时采集光纤传感器的中心波长数据,所述监测仪接收到光纤传感器的中心波长数据,比对该中心波长数据对应的粗糙触感特性值与真实的粗糙触感特性值是否一致,若不一致,则改变提供给振动马达的电流强度或/和电致伸缩材料的电流强度,直到复现的粗糙触感与真实粗糙触感之间的误差被消除,以实现控制参数的实时反馈修正以及粗糙触感的动态复现。
12.本发明的第二技术解决方案是提供一种粗糙触感复现方法,基于粗糙触感复现装置,复现粗糙触感时,根据粗糙触感特性值,设定所述振动马达的初始电流强度及初始频率以及电致伸缩材料的初始电流强度,通过电致伸缩材料收缩或伸张引起的不同褶皱程度以及振动马达振动的幅值直接刺激人体触觉,所述电致伸缩材料的不同褶皱程度以及振动马达的不同振动幅值,两者复合复现不同程度的粗糙触感;置于电致伸缩材料中的光纤传感器被收缩或伸张,其中心波长发生改变,比对该中心波长值对应的粗糙触感特性值与真实的粗糙触感是否一致,若不一致,则修正控制参数,并继续监测,直到复现的粗糙触感与真实的粗糙触感之间的误差被消除。
13.可选的,具体复现步骤如下:步骤一:由已知的某物体的粗糙触感的特性值计算得到复现这种粗糙触感时所需提供给电致伸缩材料的初始电流强度和振动马达的初始电流强度及初始频率;步骤二:打开电源经监测仪向振动马达和电致伸缩材料供电,振动马达开始工作导致承载板产生振动,同时电源供电使电致伸缩材料收缩或伸张,使承载板的上表面上产生一个有褶皱的覆盖层,置于电致伸缩材料中的光纤传感器被压缩或伸张,其中心波长发生改变,该覆盖层的褶皱与承载板的振动两者复合复现不同程度的粗糙感;步骤三:监测仪监测电致伸缩材料中光纤传感器的中心波长,比对该中心波长值对应的粗糙触感特性值与真实的粗糙触感是否一致,若不一致,则修正控制参数,并继续监测,直到复现的粗糙触感与真实的粗糙触感之间的误差被消除。
14.可选的,所述粗糙触感的特性值由粗糙触感量化装置测试得出,通过计算或模拟建立所述粗糙触感的特性值与提供给电致伸缩材料的初始电流强度和振动马达的初始电流强度及初始频率的关系。
15.可选的,使用者指腹接触承载板上的覆盖层并摩擦滑动,改变所述粗糙触感特性值,则调节所述振动马达的初始电流强度或/和初始频率以及电致伸缩材料的初始电流强度,并通过反馈修正复现的粗糙触感特性值与真实的粗糙触感的误差,直到复现的粗糙触感与真实的粗糙触感之间的误差被消除;使用者因此感受到不同的粗糙触感。
16.本发明的第三技术解决方案是提供一种基于触感复现的网购方法,在网购界面标注粗糙触感特性值,用户基于所述的粗糙触感复现装置,对所述粗糙触感特性值进行触感复现,以辅助纺织物品的选购和决策,所述粗糙触感特性值同时传递给虚拟现实系统,在虚拟现实环境中构建粗糙触感特性值对应的纺织品,通过粗糙触感复现装置和虚拟现实系统,将触觉与视觉同时复现给用户,让用户网购纺织品时有现场触觉与视觉感受的体验。
17.本发明与现有技术相比,具有以下优点:采用本发明,根据粗糙触感特性值设定所述振动马达的电流强度以及电致伸缩材料的电流强度,用以复现真实的粗糙触感,而不是通过视觉和物体特性判断物体的粗糙感,以易于控制的振动和电致伸缩材料为基础复现准确的粗糙触感,可以应用于纺织品等行业,实现粗糙触感的远程感知,并可应用于网购的辅助决策。
附图说明
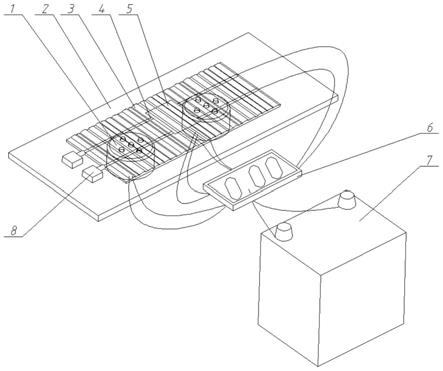
18.图1为本发明粗糙触感复现装置的等轴测视图。
19.图中:振动马达1、承载板2、电致伸缩材料3、光纤传感器4、光纤变送器5、监测仪6、电源7和光源8。
具体实施方式
20.下面结合附图和具体实施例对本发明作进一步说明。
21.本发明涵盖任何在本发明的精髓和范围上做的替代、修改、等效方法以及方案。为了使公众对本发明有彻底的了解,在以下本发明优选实施例中详细说明了具体的细节,而对本领域技术人员来说没有这些细节的描述也可以完全理解本发明。此外,本发明之附图中为了示意的需要,并没有完全精确地按照实际比例绘制,在此予以说明。
22.如图1所示,本发明的一种可以复现物体粗糙触感的装置,包括振动马达1、承载板2、电致伸缩材料3、光纤传感器4、光纤变送器5、监测仪6、电源7和光源8,所述承载板2置于振动马达1上方并与振动马达1的振动点紧贴,所述电致伸缩材料3覆盖于承载板2上表面,所述光纤传感器4和光纤变送器5均置于电致伸缩材料3内部,所述光纤变送器5与光纤传感器4相接触,所述光纤变送器5与光纤传感器4相接触,所述光纤变送器5采集所述光纤传感器4的中心波长数据传入所述监测仪6,所述电源7经监测仪6向所述光纤变送器5、振动马达1和电致伸缩材料3供电,所述承载板2配置有用于使光纤传感器4受光的光源8。
23.如图1所示,当电源7经监测仪6向振动马达1和电致伸缩材料3供电,振动马达1开始工作导致承载板2产生振动,同时,电源7供电使电致伸缩材料3收缩或伸张,使承载板2的上表面上产生一个有褶皱的覆盖层,其中包含光纤变送器5和光纤传感器4,光纤变送器5与光纤传感器4相接触,光纤变送器5实时监测光纤传感器4的中心波长传入监测仪6中,根据监测仪6监测到光纤传感器4的中心波长,比对该值对应的粗糙触感特性值与真实的粗糙触感特性值是否一致,若不一致,则改变提供给振动马达1的电流强度以及电致伸缩材料3的
电流强度,直到复现的粗糙触感与真实的粗糙触感之间的误差被消除,实现控制参数的实时反馈修正以及触感的动态复现。使用者指腹接触承载板2上的覆盖层并摩擦滑动,由于不同电流强度及电压频率下振动马达1的振动幅值、频率和电致伸缩材料3收缩程度不同,所以使用者可以感受到不同的粗糙程度,感受完毕后抬起手指结束感受。
24.下面以一个具体的实施例来进一步说明本发明。
25.选用5种已知粗糙触感特性值的典型样本,其粗糙触感特性值、对应光纤的中心波长以及计算得到复现它们的粗糙触感时所需提供给振动马达的电流强度和电致伸缩材料的电流强度如表1所示。
26.表1:粗糙触感特性值、对应光纤的中心波长和对应的控制参数样本编号12345粗糙触感特性值20406080100对应的中心波长(nm)800~850850~900900~950950~10001000~1050 i1(a)1.01.52.02.53.0 i2(ma)450500550600650之后打开电源经监测仪向振动马达和电致伸缩材料供电,振动马达开始工作导致承载板产生振动,同时,电源供电使电致伸缩材料收缩或伸张,使承载板的上表面上产生一个有褶皱的覆盖层,其中的光纤传感器被收缩或伸张,其中心波长发生改变,比对该中心波长值对应的粗糙触感特性值与真实的粗糙触感特性值是否一致,若不一致,则修正控制参数,并继续监测,直到手指感受到的复现的粗糙触感与真实的粗糙触感之间的误差被消除,该覆盖层的褶皱与承载板的振动两者复合复现不同程度的粗糙感。使用者指腹接触承载板上的覆盖层并摩擦滑动,由于不同电流强度及电压频率下振动马达的振动幅值、频率和电致伸缩材料收缩或伸张程度不同,所以使用者可以感受到不同的粗糙程度,感受完毕后抬起手指结束感受,控制电机带动双向丝杆回到起始位置,关闭电源,一次模拟结束。需要说明的是频率的设置并非是必须的,一般频率是固定的,这样就可以基于光纤传感器及光纤变送器的反馈来调节电流强度实现触感复现。但频率的加入又能带来进一步的有益效果,由于频率的加入,能为粗糙触感的复现带来更立体和真实的感觉,从一维向二维增强复现。因此,光纤的反馈传感器及光纤变送器,可以同步来调节电流强度和频率。
27.以上仅就本发明较佳的实施例作了说明,但不能理解为是对权利要求的限制。本发明不仅局限于以上实施例,其具体结构允许有变化。总之,凡在本发明独立权利要求的保护范围内所作的各种变化均在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。