1.本发明涉及一种巡检机器人,具体是一种适用于对冷库的制冷排管进行自动巡检并除霜作业的轮臂攀爬式冷库排管巡检机器人,属于冷库除霜技术领域。
背景技术:
2.冷库(又叫冷藏库)是制冷设备的一种,是指用人工手段创造与室外温度或湿度不同的环境,也是对食品、液体、化工、医药、疫苗、科学试验等物品的恒温恒湿贮藏设备,冷库一直是物流业的重要组成部分。同冰箱的制冷原理,冷库一般通过压缩机制冷,利用气化温度很低的液体(氨或氟里昂)作为冷却剂,使其在低压和机械控制的条件下蒸发,吸收贮藏库内的热量,从而达到冷却降温的目的。
3.为了避免冷库的低温环境对所冷藏物品品质的影响,冷库在维持低温环境的同时通常也需要对冷库内部进行湿度调节。然而低温高湿度的环境控制极易造成冷库制冷排管的表面结霜,冷库制冷排管表面结霜不仅妨碍冷库制冷排管的冷量传导与散发、影响辐射制冷能力,而且会使制冷排管表面热阻增大、进而增加压缩机的功耗,当冷库制冷排管表面的霜层厚度达到一定程度时,制冷效率甚至下降到30%以下,不仅会导致电能较消耗大、而且会缩短压缩机的使用寿命。因此冷库通常会在适当的周期内进行除霜操作。
4.传统的冷库制冷排管除霜方式有直接将热的高温气态冷凝剂不经截流进入蒸发器的热气除霜方式、用常温水喷淋冷却蒸发器的喷水除霜方式、在制冷排管上安装电热管的电加热除霜方式以及人工将冷库制冷排管上的霜层(冰层)剔除的人工除霜方式。热气除霜方式虽施工简单、维护方便,但易造成库温波动较大、影响冷冻冷藏质量;喷水除霜方式虽除霜效果好,但它比较适合于空冷器,对于蒸发盘管难以操作,且也存在易造成库温波动较大、影响冷冻冷藏质量的问题;电加热除霜方式多用于中、小型冷库制冷排管,但安装电热丝不仅施工难度大,而且安装后维护管理难度大、安全系数相对较低;人工除霜方式适用于小型冷库制冷排管,但操作人员不仅劳动强度大、除霜不彻底,而且易造成制冷排管的变形、甚至导致冷媒泄漏事故。
5.现有技术中出现有针对大型冷库的除霜机器人,但多是包括可沿地面行走的行走底盘的地面行走式结构,然而冷库内存放的物品通常是为有效利用空间而密集码垛摆放,这就造成不仅需额外留出供除霜机器人行走的通道、不经济,而且除霜机器人悬伸的机械臂在作业过程中通常会与码垛的物品产生干涉,进而造成存在无法作业的区域、整体除霜效果并不理想;而可沿冷库内壁平移除霜的除霜机器人,通过机械臂沿悬挂在冷库内壁上的导轨进行平移移动的方式需在冷库内壁上额外设置导轨定位安装位置,而导轨安装位置往往与已有冷库内壁的制冷排管位置产生干涉,这就造成不方便、甚至无法针对已有冷库进行加装这种贴壁移动式除霜机器人。
技术实现要素:
6.针对上述现有技术存在的问题,本发明提供一种轮臂攀爬式冷库排管巡检机器
人,能够在最大限度保持库温相对恒定、不在冷库内额外设置行走通道、便于对已有冷库进行加装使用的前提下实现无人值守的自动移动巡检和智能除霜,特别适用于大中型冷库制冷排管的除霜作业。
7.为了实现上述目的,本轮臂攀爬式冷库排管巡检机器人包括攀爬装置、体位变形装置、除霜装置和集中电控装置;
8.所述的攀爬装置包括前后对称设置的前攀爬组件和后攀爬组件;
9.前攀爬组件包括前支撑座、前摆臂和前主驱动辊轮;前摆臂相对于前支撑座左右对称设置为两件,两件前摆臂分别铰接安装在前支撑座上、且前摆臂的铰接轴的轴向方向沿前后方向设置,前摆臂与安装在前支撑座上的前摆臂摆动驱动部件传动连接;前主驱动辊轮至少相对于前支撑座左右对称设置为两件,前主驱动辊轮安装在前摆臂上、且前主驱动辊轮上设有前主驱动辊轮驱动电机;
10.后攀爬组件包括后支撑座、后摆臂和后主驱动辊轮;后摆臂相对于后支撑座左右对称设置为两件,两件后摆臂分别铰接安装在后支撑座上、且后摆臂的铰接轴的轴向方向沿前后方向设置,后摆臂与安装在后支撑座上的后摆臂摆动驱动部件传动连接;后主驱动辊轮至少相对于后支撑座左右对称设置为两件,后主驱动辊轮安装在后摆臂上、且后主驱动辊轮上设有后主驱动辊轮驱动电机;
11.所述的体位变形装置设置在前攀爬组件和后攀爬组件之间,体位变形装置是平行四边形连杆结构,包括左连杆、右连杆和摆动变形驱动部件;长度尺寸相同的左连杆和右连杆沿左右水平方向平行设置,左连杆和右连杆的前端分别铰接安装在前支撑座上,左连杆和右连杆的后端分别铰接安装在后支撑座上,左连杆、前支撑座、右连杆和后支撑座共同围成平行四边形结构;摆动变形驱动部件设置在左连杆或右连杆或前支撑座或后支撑座上;
12.所述的除霜装置包括前除霜组件和后除霜组件;前除霜组件包括前除霜监测传感器组件和前除霜执行机构,前除霜监测传感器组件安装在前支撑座或前除霜执行机构上,前除霜执行机构对应设置在前支撑座的前方;后除霜组件包括后除霜监测传感器组件和后除霜执行机构,后除霜监测传感器组件安装在后支撑座或后除霜执行机构上,后除霜执行机构对应设置在后支撑座的后方;
13.所述的集中电控装置包括控制器、攀爬控制回路、除霜控制回路和体位变形控制回路,控制器分别与前摆臂摆动驱动部件、前主驱动辊轮驱动电机、前除霜监测传感器组件、前除霜执行机构、后摆臂摆动驱动部件、后主驱动辊轮驱动电机、后除霜监测传感器组件、后除霜执行机构和摆动变形驱动部件电连接。
14.作为本发明的一种实施方式,前除霜执行机构和后除霜执行机构沿左右方向的覆盖宽度尺寸与相邻两件制冷排管直管段的总体宽度尺寸配合。
15.作为本发明的另一种实施方式,左连杆和右连杆的前端铰接位置相对于前支撑座左右对称设置、左连杆和右连杆的后端铰接位置相对于后支撑座左右对称设置;前除霜执行机构和后除霜执行机构沿左右方向的覆盖宽度尺寸对应制冷排管单根直管段沿左右方向的宽度尺寸;前除霜组件还包括与前除霜执行机构固定安装连接的前回转悬伸摆杆和与前回转悬伸摆杆传动连接的前除霜执行机构摆动回转电机,前除霜执行机构摆动回转电机的摆动回转中心位于左连杆或右连杆的几何中心位置、且前除霜执行机构摆动回转电机与控制器电连接;后除霜组件还包括与后除霜执行机构固定安装连接的后回转悬伸摆杆和与
后回转悬伸摆杆传动连接的后除霜执行机构摆动回转电机,后除霜执行机构摆动回转电机的摆动回转中心位于右连杆或左连杆的几何中心位置、且后除霜执行机构摆动回转电机与控制器电连接。
16.作为本发明的进一步改进方案,前支撑座和后支撑座的底部对应制冷排管直管段的位置还均设有沿前后方向滚动设置的副辊轮。
17.作为本发明的进一步改进方案,副辊轮通过轴承卧式安装在前支撑座和后支撑座的底平面内部、且副辊轮与副辊轮驱动电机传动连接,副辊轮驱动电机与控制器电连接。
18.作为本发明的进一步改进方案,前摆臂呈合毕的夹持状态时,前主驱动辊轮的底端距离前支撑座之间的高度尺寸大于制冷排管直管段的底端距离前支撑座之间的高度尺寸;后摆臂呈合毕的夹持状态时,后主驱动辊轮的底端距离后支撑座之间的高度尺寸大于制冷排管直管段的底端距离后支撑座之间的高度尺寸。
19.作为本发明的进一步改进方案,前摆臂和后摆臂均是具有弧形段的弯臂结构,在前摆臂呈合毕的夹持状态时前主驱动辊轮呈托载在制冷排管直管段底部的状态、在后摆臂呈合毕的夹持状态时后主驱动辊轮呈托载在制冷排管直管段底部的状态。
20.作为本发明的进一步改进方案,前主驱动辊轮和后主驱动辊轮的辊面上对应制冷排管直管段的位置还设有与制冷排管直管段的外径尺寸配合的凹环结构,在前摆臂呈合毕的夹持状态时前主驱动辊轮的凹环结构卡合在制冷排管直管段上、在后摆臂呈合毕的夹持状态时后主驱动辊轮的凹环结构卡合在制冷排管直管段上。
21.作为本发明的进一步改进方案,前主驱动辊轮相对于前支撑座左右对称设置为多组、同一前摆臂上沿前后方向安装有多个前主驱动辊轮形成前主驱动辊轮组,后主驱动辊轮相对于后支撑座左右对称设置为多组、同一后摆臂上沿前后方向安装有多个后主驱动辊轮形成后主驱动辊轮组。
22.作为本发明的进一步改进方案,前除霜执行机构和后除霜执行机构的左右两端均分别铰接设有可沿左右方向摆动开合的弧形延伸结构,弧形延伸结构包括与控制器电连接的弧形段开合摆动驱动部件。
23.与现有技术相比,本轮臂攀爬式冷库排管巡检机器人采用整体攀爬在制冷排管上并沿管爬行进行除霜作业的方式,无需在冷库内额外设置除霜机器人行走通道,可最大限度降低智能除霜机器人在冷库内的额外空间占用、且便于对已有冷库进行加装使用;通过控制摆动变形驱动部件动作使前支撑座和后支撑座呈前后对称的状态、并控制前摆臂摆动驱动部件和后摆臂摆动驱动部件动作使两件前摆臂和两件后摆臂分别沿左右方向同步相向摆动呈合毕夹持状态,即可实现前主驱动辊轮和后主驱动辊轮分别夹紧贴靠在制冷排管的两件相邻直管段上、进而实现本轮臂攀爬式冷库排管巡检机器人在制冷排管两件相邻直管段上的稳固定位,控制前主驱动辊轮和后主驱动辊轮同向旋转,即可实现本轮臂攀爬式冷库排管巡检机器人在制冷排管两件相邻直管段上的沿管直线爬行,配合前主驱动辊轮和后主驱动辊轮的不同的夹紧或松开制冷排管直管段的顺序,可以实现本轮臂攀爬式冷库排管巡检机器人在制冷排管两件相邻直管段上的沿管直线爬行过程中翻越直管段定位节点的箍环和支撑角铁的越障作业,配合前主驱动辊轮和后主驱动辊轮的不同的夹紧或松开制冷排管直管段的顺序、并通过控制摆动变形驱动部件动作使体位变形装置的平行四边形连杆结构发生变形,可以实现本轮臂攀爬式冷库排管巡检机器人的前攀爬组件(或后攀爬组
件)相对于后攀爬组件(或前攀爬组件)向邻近制冷排管直管段方向平移的跨管移动,进而可以实现本轮臂攀爬式冷库排管巡检机器人沿制冷排管的s形走向连续爬行;由于前除霜执行机构和后除霜执行机构分别对应设置在前支撑座的前部和后支撑座的后部,因此可以实现沿管爬行移动过程中同一直管段的前后两次除霜作业、进而实现较好的除霜效果,还可以将后除霜执行机构的除霜结构设置成与前除霜执行机构的除霜结构不同的结构,即采用多种除霜结构复合除霜的方式,进而实现更好的除霜效果;本轮臂攀爬式冷库排管巡检机器人可以分别通过前除霜监测传感器组件和后除霜监测传感器组件对制冷排管直管段外表面上霜层位置和霜层厚度进行反馈、再分别控制前除霜执行机构和后除霜执行机构对其经过的制冷排管直管段外表面进行有针对性的除霜作业,实现可控除霜强度的智能除霜,不仅可以实现无人值守的自动巡航和除霜作业,而且可以最大限度保持库温相对恒定、降低冷库能耗,特别适用于大中型冷库制冷排管的除霜作业。
附图说明
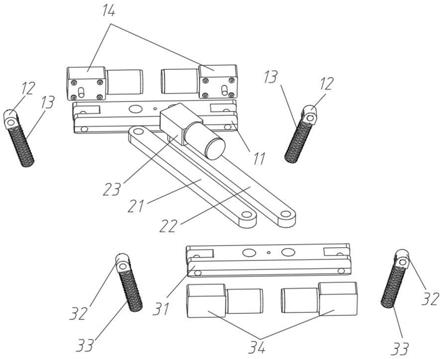
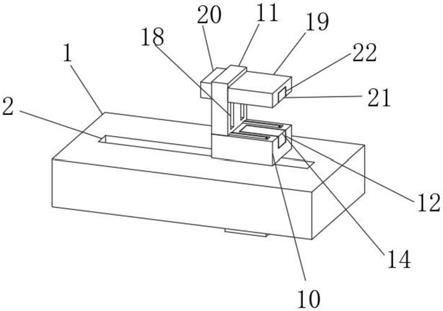
24.图1是本发明攀爬装置与体位变形装置的三维安装结构示意图;
25.图2是图1的爆炸结构示意图;
26.图3是本发明攀爬在制冷排管直管段上时的三维结构示意图;
27.图4是本发明沿管越障作业时的过程示意图,其中(a)是本发明通过前攀爬组件和后攀爬组件攀爬在制冷排管直管段上的结构示意图、(b)是本发明通过后攀爬组件攀爬在制冷排管直管段上的结构示意图、(c)是本发明通过控制后攀爬组件推动前攀爬组件越障过程的结构示意图、(d)是本发明在前攀爬组件越障后通过前攀爬组件和后攀爬组件攀爬在制冷排管直管段上的结构示意图;
28.图5是本发明跨管作业时的过程示意图,其中(a)是本发明通过前攀爬组件和后攀爬组件攀爬在制冷排管直管段上的结构示意图、(b)是本发明通过后攀爬组件攀爬在制冷排管直管段上的结构示意图、(c)是本发明前攀爬组件向邻近未除霜直管段方向平移移动的结构示意图、(d)是本发明前攀爬组件的前主驱动辊轮夹持贴靠在未除霜直管段上的结构示意图、(e)是本发明后攀爬组件的后主驱动辊轮脱离已除霜直管段的结构示意图、(f)是本发明后攀爬组件向邻近未除霜直管段方向平移移动的结构示意图、(g)是本发明后攀爬组件的后主驱动辊轮夹持贴靠在未除霜直管段上的结构示意图、(h)是本发明前攀爬组件进行越障作业的结构示意图;
29.图6是本发明前除霜执行机构和后除霜执行机构沿左右方向的覆盖宽度尺寸与相邻两件制冷排管直管段的总体宽度尺寸配合时的结构示意图;
30.图7是本发明前除霜执行机构和后除霜执行机构沿左右方向的覆盖宽度尺寸对应制冷排管单根直管段沿左右方向的宽度尺寸时的结构示意图;
31.图8是本发明前主驱动辊轮(或后主驱动辊轮)夹持制冷排管直管段状态时的结构示意图;
32.图9是本发明前摆臂(或后摆臂)安装有包括多个前主驱动辊轮(或后主驱动辊轮)的前主驱动辊轮组(或后主驱动辊轮组)时的俯视结构示意图。
33.图中:1、前攀爬组件,11、前支撑座,12、前摆臂,13、前主驱动辊轮,14、前摆臂摆动驱动部件,2、体位变形装置,21、左连杆,22、右连杆,23、摆动变形驱动部件,3、后攀爬组件,
31、后支撑座,32、后摆臂,33、后主驱动辊轮,34、后摆臂摆动驱动部件,4、前除霜组件,41、前除霜执行机构,42、前回转悬伸摆杆,43、前除霜执行机构摆动回转电机,5、后除霜组件,51、后除霜执行机构,52、后回转悬伸摆杆,53、后除霜执行机构摆动回转电机,6、副辊轮,7、制冷排管组件,71、支撑角铁,72、箍环,73、制冷排管。
具体实施方式
34.下面结合附图对本发明做进一步说明。
35.本轮臂攀爬式冷库排管巡检机器人包括攀爬装置、体位变形装置2、除霜装置和集中电控装置。
36.如图1、图2所示,所述的攀爬装置包括前后对称设置的前攀爬组件1和后攀爬组件3;
37.前攀爬组件1包括前支撑座11、前摆臂12和前主驱动辊轮13;前摆臂12相对于前支撑座11左右对称设置为两件,两件前摆臂12分别铰接安装在前支撑座11上、且前摆臂12的铰接轴的轴向方向沿前后方向设置,前摆臂12与安装在前支撑座11上的前摆臂摆动驱动部件14传动连接,前摆臂摆动驱动部件14可以是直线伸缩动作控制的液压缸或气缸或电动缸等伸缩缸结构、也可以是周向旋转控制的驱动电机等结构,通过控制前摆臂摆动驱动部件14的动作可以实现控制两件前摆臂12沿左右方向同步相向摆动使前摆臂12与前支撑座11之间的夹角呈锐角的合毕夹持状态、或者实现控制两件前摆臂12沿左右方向同步相背摆动使前摆臂12与前支撑座11之间的夹角呈不小于平角的张开非夹持状态,两件前摆臂12可以通过连杆机构传动连接共用同一个前摆臂摆动驱动部件14、也可以分别传动连接一个前摆臂摆动驱动部件14;前主驱动辊轮13至少相对于前支撑座11左右对称设置为两件,前主驱动辊轮13安装在前摆臂12上、且前主驱动辊轮13的辊轮中轴线的方向与前摆臂12的悬伸方向一致,前主驱动辊轮13上设有前主驱动辊轮驱动电机,通过控制前主驱动辊轮驱动电机的动作可以实现前主驱动辊轮13绕其辊轮中轴线正向旋转或反向旋转,为了简化机构设置,前主驱动辊轮驱动电机可以是同轴设置在前主驱动辊轮13内部的轮毂电机结构;
38.后攀爬组件3包括后支撑座31、后摆臂32和后主驱动辊轮33;后摆臂32相对于后支撑座31左右对称设置为两件,两件后摆臂32分别铰接安装在后支撑座31上、且后摆臂32的铰接轴的轴向方向沿前后方向设置,后摆臂32与安装在后支撑座31上的后摆臂摆动驱动部件34传动连接,通过控制后摆臂摆动驱动部件34的动作可以实现控制两件后摆臂32沿左右方向同步相向摆动使后摆臂32与后支撑座31之间的夹角呈锐角的合毕夹持状态、或者实现控制两件后摆臂32沿左右方向同步相背摆动使后摆臂32与后支撑座31之间的夹角呈不小于平角的张开非夹持状态;后主驱动辊轮33至少相对于后支撑座31左右对称设置为两件,后主驱动辊轮33安装在后摆臂32上、且后主驱动辊轮33的辊轮中轴线的方向与后摆臂32的悬伸方向一致,后主驱动辊轮33上设有后主驱动辊轮驱动电机。
39.所述的体位变形装置2设置在前攀爬组件1和后攀爬组件3之间,体位变形装置2是平行四边形连杆结构,包括左连杆21、右连杆22和摆动变形驱动部件23;左连杆21和右连杆22长度尺寸相同、且左连杆21和右连杆22沿左右水平方向平行设置,左连杆21和右连杆22的前端分别铰接安装在前支撑座11上,左连杆21和右连杆22的后端分别铰接安装在后支撑座31上,左连杆21、前支撑座11、右连杆22和后支撑座31共同围成平行四边形结构;摆动变
形驱动部件23设置在左连杆21或右连杆22或前支撑座11或后支撑座31上,摆动变形驱动部件23可以是安装在前支撑座11或后支撑座31上的、直线伸缩动作控制的液压缸或气缸或电动缸等伸缩缸结构,摆动变形驱动部件23也可以是如图1、图2所示的安装在左连杆21或右连杆22的铰接位置的周向回转控制的回转电机结构,通过控制摆动变形驱动部件23的动作可以实现控制左连杆21相对于前支撑座11和后支撑座31摆动并角度定位、或者实现控制右连杆22相对于前支撑座11和后支撑座31摆动并角度定位,进而实现控制平行四边形结构的变形,从而实现控制前攀爬组件1(或后攀爬组件3)相对于后攀爬组件3(或前攀爬组件1)的摆动平移位置变化。
40.所述的除霜装置包括前除霜组件4和后除霜组件5;前除霜组件4包括前除霜监测传感器组件和前除霜执行机构41,前除霜监测传感器组件安装在前支撑座11或前除霜执行机构41上,前除霜执行机构41对应设置在前支撑座11的前方;后除霜组件5包括后除霜监测传感器组件和后除霜执行机构51,后除霜监测传感器组件安装在后支撑座31或后除霜执行机构51上,后除霜执行机构51对应设置在后支撑座31的后方;前除霜监测传感器组件和后除霜监测传感器组件均包括可用于避障的距离传感器,前除霜监测传感器组件和后除霜监测传感器组件也可以还均包括是用于直接获取制冷排管图像的模式识别摄像头、通过图像判断霜层的位置和厚度,前除霜监测传感器组件和后除霜监测传感器组件可以还均包括是用于获取制冷排管温度的红外探头、通过温度判断霜层的位置和厚度,或者前除霜监测传感器组件和后除霜监测传感器组件可以还均包括是用于获取霜层声呐信号的声呐探头、通过声呐反馈判断霜层的位置和厚度等等;前除霜执行机构41和后除霜执行机构51可以是可导流输出融霜热气的导流罩结构(前除霜执行机构41和后除霜执行机构51的热气发生部件产生的融霜热气可通过前热气输入管输出、并通过面向制冷排管外表面的导流罩开口喷吹制冷排管外表面),前除霜执行机构41和后除霜执行机构51也可以是内置有电热丝的烘烤罩结构(通过面向制冷排管外表面的烘烤罩开口烘烤制冷排管外表面),前除霜执行机构41和后除霜执行机构51也可以是可喷出融霜水的喷水罩结构(通过面向制冷排管外表面的喷水罩喷头向制冷排管外表面喷洒融霜水)等等。
41.所述的集中电控装置包括控制器、攀爬控制回路、除霜控制回路和体位变形控制回路,控制器分别与前摆臂摆动驱动部件14、前主驱动辊轮13的前主驱动辊轮驱动电机、前除霜监测传感器组件、前除霜执行机构41、后摆臂摆动驱动部件34、后主驱动辊轮33的后主驱动辊轮驱动电机、后除霜监测传感器组件、后除霜执行机构51和摆动变形驱动部件23电连接。
42.如图3所示,冷库的制冷排管组件7通常包括制冷排管73和支撑角铁71,支撑角铁71固定设置在冷库内壁(立壁和顶壁)上,包括多个平行排列设置的直管段和首尾连接在相邻两个直管段之间的弯管段的制冷排管73整体通过箍环72定位架设在支撑角铁71上。使用本轮臂攀爬式冷库排管巡检机器人对制冷排管73进行除霜作业时,通过控制器控制摆动变形驱动部件23动作使左连杆21和右连杆22分别呈垂直于前支撑座11和后支撑座31的状态,此时前攀爬组件1和后攀爬组件3呈前后对称的状态,将本轮臂攀爬式冷库排管巡检机器人整体贴靠在制冷排管73上后,先启动攀爬控制回路,控制器控制前摆臂摆动驱动部件14和后摆臂摆动驱动部件34动作使两件前摆臂12和两件后摆臂32分别沿左右方向同步相向摆动呈合毕夹持状态,前主驱动辊轮13和后主驱动辊轮33即被带动并分别夹紧贴靠在制冷排
管73的两件相邻直管段上、实现本轮臂攀爬式冷库排管巡检机器人在制冷排管73上的定位,即可启动除霜控制回路进行沿管爬行的除霜作业;进行沿管爬行除霜作业时同步启动前主驱动辊轮13的前主驱动辊轮驱动电机和后主驱动辊轮33的后主驱动辊轮驱动电机、使前主驱动辊轮13和后主驱动辊轮33沿同一旋转方向旋转,前支撑座11和后支撑座31即分别带动前除霜执行机构41和后除霜执行机构51同步沿制冷排管73的直管段移动,控制器在前除霜执行机构41和后除霜执行机构51移动过程中通过前除霜监测传感器组件和后除霜监测传感器组件对直管段外表面上的霜层位置和霜层厚度反馈、并控制前除霜执行机构41和后除霜执行机构51对其经过的直管段外表面进行除霜作业,可以实现沿管爬行移动过程中同一直管段的前后两次除霜作业,直至移动至该直管段长度方向的端部、完成该直管段的除霜作业。两件前摆臂12和两件后摆臂32可分别沿左右方向同步相背摆动呈不小于平角的张开非夹持状态的结构,可以实现本轮臂攀爬式冷库排管巡检机器人沿管爬行移动过程中前攀爬组件1或后攀爬组件3平移跨越该直管段定位节点的箍环72和支撑角铁71的越障作业,如图4所示,以本轮臂攀爬式冷库排管巡检机器人沿管前移爬行为例,如图4(a)所示,当前除霜监测传感器组件反馈位于前支撑座11的前方具有直管段定位节点的箍环72和支撑角铁71时,如图4(b)所示,控制器控制前摆臂摆动驱动部件14动作使两件前摆臂12沿左右方向同步相背摆动呈不小于平角的张开非夹持状态,此时前主驱动辊轮13即脱离制冷排管73的两件相邻直管段,如图4(c)所示,控制器继续控制后主驱动辊轮33的后主驱动辊轮驱动电机动作使后支撑座31带动后除霜组件5、并通过体位变形装置2带动前支撑座11沿制冷排管73的直管段前移,待前支撑座11越过直管段定位节点的箍环72和支撑角铁71后,如图4(d)所示,控制器控制前摆臂摆动驱动部件14动作使两件前摆臂12沿左右方向同步相向摆动呈合毕夹持状态,此时前主驱动辊轮13即重新贴靠在制冷排管73的两件相邻直管段上、完成前攀爬组件1的越障作业,控制器继续同步控制前主驱动辊轮13的前主驱动辊轮驱动电机和后主驱动辊轮33的后主驱动辊轮驱动电机同向旋转进行沿管爬行,同理,控制器可控制后攀爬组件3进行越障作业。待本轮臂攀爬式冷库排管巡检机器人沿管爬行至直管段的端部后,如图5所示,控制器同步控制前主驱动辊轮13的前主驱动辊轮驱动电机和后主驱动辊轮33的后主驱动辊轮驱动电机停止后、启动体位变形控制回路进行跨管作业,以本轮臂攀爬式冷库排管巡检机器人沿管爬行前移至直管段的端部为例,如图5(a)所示,当前除霜监测传感器组件反馈位于前支撑座11的前方是直管段的端部时,如图5(b)所示,控制器首先控制前摆臂摆动驱动部件14动作使两件前摆臂12沿左右方向同步相背摆动呈不小于平角的张开非夹持状态,然后如图5(c)所示,控制器控制摆动变形驱动部件23动作使左连杆21相对于后支撑座31向左或向右摆动至设定角度并定位,平行四边形结构变形使前支撑座11向已完成除霜作业直管段的邻近未除霜直管段方向平移移动设定距离、并定位在对应邻近未除霜直管段的位置,然后如图5(d)所示,控制器控制前摆臂摆动驱动部件14动作使两件前摆臂12沿左右方向同步相向摆动呈合毕夹持状态,此时前主驱动辊轮13即夹持贴靠在未除霜直管段上、完成前攀爬组件1的跨管平移作业,然后如图5(e)所示,控制器控制后摆臂摆动驱动部件34动作使两件后摆臂32沿左右方向同步相背摆动呈不小于平角的张开非夹持状态,然后如图5(f)所示,控制器控制摆动变形驱动部件23动作使左连杆21复位至垂直于前支撑座11的状态,平行四边形结构变形使后支撑座31向已完成除霜作业直管段的邻近未除霜直管段方向平移移动设定距离、并定位在对应邻近未除霜直管段的位置,然后
如图5(g)所示,控制器控制后摆臂摆动驱动部件34动作使两件后摆臂32沿左右方向同步相向摆动呈合毕夹持状态,此时后主驱动辊轮33即夹持贴靠在未除霜直管段上、完成后攀爬组件3的跨管平移作业,即可控制本轮臂攀爬式冷库排管巡检机器人沿管后移继续进行除霜作业,若前攀爬组件1与后攀爬组件3之间存在直管段定位节点的箍环72和支撑角铁71,则如图5(h)所示,控制前攀爬组件1进行越障作业即可,依次类推,可实现本轮臂攀爬式冷库排管巡检机器人沿制冷排管73的s形走向进行连续爬行除霜作业。每次跨管作业只跨越一根直管段的情况下,即跨管作业后本轮臂攀爬式冷库排管巡检机器人跨骑在一根已除霜作业直管段和一根未除霜作业直管段上,还可以实现已除霜作业直管段的再次除霜作业、可实现更好的除霜效果。
43.为了实现对制冷排管73的首尾连接在相邻两个直管段之间的弯管段进行除霜,作为本发明的一种实施方式,如图6所示,前除霜执行机构41和后除霜执行机构51沿左右方向的覆盖宽度尺寸可以与相邻两件制冷排管73直管段的总体宽度尺寸配合,可以实现同时对跨骑的相邻两件制冷排管73直管段进行除霜作业,待本轮臂攀爬式冷库排管巡检机器人沿管爬行至直管段的端部时,前除霜执行机构41或后除霜执行机构51可以直接覆盖在制冷排管73的弯管段上、实现对制冷排管73的弯管段进行除霜作业。
44.为了实现对制冷排管73的首尾连接在相邻两个直管段之间的弯管段进行除霜,作为本发明的另一种实施方式,如图7所示,前除霜执行机构41沿左右方向的覆盖宽度尺寸对应制冷排管73单根直管段沿左右方向的宽度尺寸,如图3所示,前除霜组件4还包括与前除霜执行机构41固定安装连接的前回转悬伸摆杆42和与前回转悬伸摆杆42传动连接的前除霜执行机构摆动回转电机43,前除霜执行机构摆动回转电机43的摆动回转中心位于左连杆21或右连杆22的几何中心位置、且前除霜执行机构摆动回转电机43与控制器电连接,通过控制前除霜执行机构摆动回转电机43的动作可以实现前回转悬伸摆杆42带动前除霜执行机构41围绕前除霜执行机构摆动回转电机43的摆动回转中心周向回转;如图7所示,后除霜执行机构51沿左右方向的覆盖宽度尺寸对应制冷排管73单根直管段沿左右方向的宽度尺寸,如图3所示,后除霜组件5还包括与后除霜执行机构51固定安装连接的后回转悬伸摆杆52和与后回转悬伸摆杆52传动连接的后除霜执行机构摆动回转电机53,后除霜执行机构摆动回转电机53的摆动回转中心位于右连杆22或左连杆21的几何中心位置、且后除霜执行机构摆动回转电机53与控制器电连接,通过控制后除霜执行机构摆动回转电机53的动作可以实现后回转悬伸摆杆52带动后除霜执行机构51围绕后除霜执行机构摆动回转电机53的摆动回转中心周向回转。待本轮臂攀爬式冷库排管巡检机器人沿管爬行至直管段的端部后,可以先进行弯管段除霜作业、再进行跨管作业,以本轮臂攀爬式冷库排管巡检机器人沿管爬行前移至直管段的端部为例,此时前除霜执行机构41对应位于制冷排管73弯管段的上方,控制器控制前除霜执行机构摆动回转电机43动作使前回转悬伸摆杆42带动前除霜执行机构41围绕前除霜执行机构摆动回转电机43的摆动回转中心周向回转设定角度,进而实现前除霜执行机构41对弯管段进行除霜,完成弯管段除霜作业后,控制器控制前除霜执行机构摆动回转电机43复位即可;同理,本轮臂攀爬式冷库排管巡检机器人沿管爬行后移至直管段的端部时,控制器控制后除霜执行机构摆动回转电机53动作使后除霜执行机构51对弯管段进行除霜作业。为了提高除霜效果、最大限度降低因前除霜执行机构41和后除霜执行机构51的回转半径与弯管段的弯曲半径不匹配而引起的覆盖偏差,如图3所示,可以控制前
除霜执行机构41和后除霜执行机构51自左右两方向共同对同一弯管段进行除霜作业。
45.为了实现前攀爬组件1(或后攀爬组件3)相对于后攀爬组件3(或前攀爬组件1)向左平移和向右平移的幅度一致,进而便于本轮臂攀爬式冷库排管巡检机器人沿制冷排管73的s形走向进行连续爬行除霜作业,作为本发明的进一步改进方案,左连杆21和右连杆22的前端铰接位置相对于前支撑座11左右对称设置、左连杆21和右连杆22的后端铰接位置相对于后支撑座31左右对称设置。
46.由于制冷排管73的直管段的截面是圆形结构,因此为了实现更好的除霜效果,作为本发明的进一步改进方案,如图6、图7所示,前除霜执行机构41和后除霜执行机构51的左右两端均分别铰接设有可沿左右方向摆动开合的弧形延伸结构,弧形延伸结构包括与控制器电连接的弧形段开合摆动驱动部件。本轮臂攀爬式冷库排管巡检机器人攀爬在制冷排管73的两件相邻直管段上时,可控制前除霜执行机构41和后除霜执行机构51的弧形延伸结构卡合在直管段的左右侧面、甚至部分底面,进而形成对直管段的半包围结构、从而可以实现更好的除霜效果。在沿管移动过程中,为避免移动干涉,前除霜监测传感器组件和后除霜监测传感器组件均包括用于反馈是否到达直管段端部、是否在移动前方具有障碍物的距离传感器,在沿管移动时可根据距离传感器的反馈控制弧形延伸结构的弧形段开合摆动驱动部件动作实现避障。
47.为了使前主驱动辊轮13和后主驱动辊轮33能够稳固夹持制冷排管73的直管段、并稳固沿管爬行,如图8所示,前支撑座11和后支撑座31的底部对应制冷排管73直管段的位置还均设有沿前后方向滚动设置的副辊轮6,副辊轮6通过轴承卧式安装在前支撑座11和后支撑座31的底平面内部,副辊轮6可以作为从动辊轮使用,副辊轮6也可以传动连接设置与控制器电连接的副辊轮驱动电机、作为辅助驱动辊轮使用,为增大接触面积、防止辊面打滑,副辊轮6的辊面上可以设置与制冷排管73直管段的外径尺寸配合的凹环结构。前摆臂12呈合毕的夹持状态时,前主驱动辊轮13的底端距离前支撑座11之间的高度尺寸大于制冷排管73直管段的底端距离前支撑座11之间的高度尺寸;后摆臂32呈合毕的夹持状态时,后主驱动辊轮33的底端距离后支撑座31之间的高度尺寸大于制冷排管73直管段的底端距离后支撑座31之间的高度尺寸。如图8所示,前摆臂12和后摆臂32也可以设置成具有弧形段的弯臂结构,如此设置可以在前摆臂12呈合毕的夹持状态时前主驱动辊轮13呈托载在制冷排管73直管段底部的状态、在后摆臂32呈合毕的夹持状态时后主驱动辊轮33呈托载在制冷排管73直管段底部的状态。为防止打滑,前主驱动辊轮13和后主驱动辊轮33的辊面上还可以设置防滑覆层。为增大接触面积、防止辊面打滑,前主驱动辊轮13和后主驱动辊轮33的辊面上对应制冷排管73直管段的位置还设有与制冷排管73直管段的外径尺寸配合的凹环结构,在前摆臂12呈合毕的夹持状态时前主驱动辊轮13的凹环结构可卡合在制冷排管73直管段上、在后摆臂32呈合毕的夹持状态时后主驱动辊轮33的凹环结构可卡合在制冷排管73直管段上。为保证沿管越障过程中移动的稳定性,如图9所示,前主驱动辊轮13相对于前支撑座11左右对称设置为多组、同一前摆臂12上沿前后方向安装有多个前主驱动辊轮13形成前主驱动辊轮组,后主驱动辊轮33相对于后支撑座31左右对称设置为多组、同一后摆臂32上沿前后方向安装有多个后主驱动辊轮33形成后主驱动辊轮组,如此设置,可以在沿管越障过程中前摆臂12(或后摆臂32)呈合毕的夹持状态时,多个前主驱动辊轮13(或后主驱动辊轮33)形成的前主驱动辊轮组(或后主驱动辊轮组)可以实现对制冷排管73直管段的稳固夹持定位。
48.本轮臂攀爬式冷库排管巡检机器人可以采用通过电源线提供电能的有线控制的方式,也可以采用通过充电电池提供电能的无线控制方式,鉴于区域化作业的前提下减小本轮臂攀爬式冷库排管巡检机器人的整体体积和重量、便于实现更小的空间占用率,且避免频繁充电的问题,优选采用有线控制的方式。为实现更好的除霜效果,后除霜执行机构51的除霜方式可以与前除霜执行机构41的除霜方式不同,即,沿管爬行过程中即可完成同一直管段的两次不同除霜方式的复合除霜作业。
49.本轮臂攀爬式冷库排管巡检机器人采用整体攀爬在制冷排管上并沿管爬行进行除霜作业的方式,无需在冷库内额外设置除霜机器人行走通道,可最大限度降低智能除霜机器人在冷库内的额外空间占用、且便于对已有冷库进行加装使用;通过控制摆动变形驱动部件23动作使前支撑座11和后支撑座31呈前后对称的状态、并控制前摆臂摆动驱动部件14和后摆臂摆动驱动部件34动作使两件前摆臂12和两件后摆臂32分别沿左右方向同步相向摆动呈合毕夹持状态,即可实现前主驱动辊轮13和后主驱动辊轮33分别夹紧贴靠在制冷排管73的两件相邻直管段上、进而实现本轮臂攀爬式冷库排管巡检机器人在制冷排管73两件相邻直管段上的稳固定位,控制前主驱动辊轮13和后主驱动辊轮33同向旋转,即可实现本轮臂攀爬式冷库排管巡检机器人在制冷排管73两件相邻直管段上的沿管直线爬行,配合前主驱动辊轮13和后主驱动辊轮33的不同的夹紧或松开制冷排管73直管段的顺序,可以实现本轮臂攀爬式冷库排管巡检机器人在制冷排管73两件相邻直管段上的沿管直线爬行过程中翻越直管段定位节点的箍环72和支撑角铁71的越障作业,配合前主驱动辊轮13和后主驱动辊轮33的不同的夹紧或松开制冷排管73直管段的顺序、并通过控制摆动变形驱动部件23动作使体位变形装置2的平行四边形连杆结构发生变形,可以实现本轮臂攀爬式冷库排管巡检机器人的前攀爬组件1(或后攀爬组件3)相对于后攀爬组件3(或前攀爬组件1)向邻近制冷排管73直管段方向平移的跨管移动,进而可以实现本轮臂攀爬式冷库排管巡检机器人沿制冷排管73的s形走向连续爬行;由于前除霜执行机构41和后除霜执行机构51分别对应设置在前支撑座11的前部和后支撑座31的后部,因此可以实现沿管爬行移动过程中同一直管段的前后两次除霜作业、进而实现较好的除霜效果,还可以将后除霜执行机构51的除霜结构设置成与前除霜执行机构41的除霜结构不同的结构,即采用多种除霜结构复合除霜的方式,进而实现更好的除霜效果;本轮臂攀爬式冷库排管巡检机器人可以分别通过前除霜监测传感器组件和后除霜监测传感器组件对制冷排管73直管段外表面上霜层位置和霜层厚度进行反馈、再分别控制前除霜执行机构41和后除霜执行机构51对其经过的制冷排管73直管段外表面进行有针对性的除霜作业,实现可控除霜强度的智能除霜,不仅可以实现无人值守的自动巡航和除霜作业,而且可以最大限度保持库温相对恒定、降低冷库能耗,特别适用于大中型冷库制冷排管的除霜作业。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。