1.本发明涉及医疗设备领域,具体地,涉及一种固定在骨骼上的机器人辅助关节置换手术系统和使用方法。
背景技术:
2.关节置换是指用生物相容性和机械性能良好的金属材料、高分子材料或陶瓷材料制成的一种类似人体骨关节的假体,利用手术方法用人工关节置换被疾病或损伤所破坏的关节面,其目的是切除病灶,清除疼痛,恢复关节的活动与原有的功能。人工关节置换具有关节活动较好,可早期下地活动,减少老年病人长期卧床的并发症等优点。传统的做法是医生使用手动工具实现置换手术,对于医生的临床经验要求较高,且病患个体的差异性导致手术难度较大。
3.通过手术机器人辅助手术是目前医疗科技领域研究的热点方向,为了实现通用化,常见的手术机器人为落地式或固定在手术床上的手术机器人。专利文献cn101947126a公开了一种骨科手术辅助机器人系统,这样的机器人虽然能够实现多种不同手术,但是技术复杂,缺乏经验的外科医生往往难以辨别这些技术错误。同时,这种机器人要求工作空间大(需要一个具有一定伸展范围或较大工作空间的机械臂,以适应膝、臀、肩和脊柱等不同部位的手术),成本高,占地面积大,并由于机器人配置问题导致精确度不高,增加了潜在的误差因素,导致手术结果难以呈现一致性。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种固定在骨骼上的机器人辅助关节置换手术系统和使用方法。
5.根据本发明提供的一种固定在骨骼上的机器人辅助关节置换手术系统,包括:电钻204、铰钻轴202、操作机器人203、固定结构205、髋臼锉103和控制器206;
6.所述电钻204的输出端通过所述铰钻轴202与所述髋臼锉103驱动连接,所述操作机器人203的第一端连接在所述铰钻轴202靠近所述电钻204的部分,所述铰钻轴202靠近所述髋臼锉103的部分为自由端,能够在所述操作机器人203第二端的限位通孔306中活动,所述固定结构205连接在所述操作机器人203上,所述控制器206与所述电钻204和所述操作机器人203电连接。
7.优选地,所述操作机器人203包括:底盘304、顶盘308和多个线性致动器307;
8.每个线性致动器307的两端分别通过连接件303连接在所述底盘304和所述顶盘308之间;
9.所述顶盘308上设置有用于连接所述铰钻轴202轴套的夹具309;
10.所述底盘304上开设有所述限位通孔306,以及用于固定所述固定结构205的孔,所述底盘304的外周设置有多个径向延伸的延伸部,所述孔开设于所述延伸部。
11.优选地,所述操作机器人203包括:底盘304、顶盘308和多个线性致动器307;
12.每个线性致动器307的两端分别通过连接件303连接在所述底盘304和所述顶盘308之间;
13.所述顶盘308上设置有用于连接所述铰钻轴202轴套的夹具309,以及用于固定所述固定结构205的孔,所述顶盘308的外周设置有多个径向延伸的延伸部,所述孔开设于所述延伸部;
14.所述底盘304上开设有所述限位通孔306。
15.优选地,夹具309内或所述底盘304上设置有传感器,所述传感器与所述控制器206电连接,检测施加到髋臼锉103上的横向力以及髋臼锉103的位置。
16.优选地,所述限位通孔306的尺寸大于所述髋臼锉103的尺寸,所述髋臼锉103能够通过所述限位通孔306收缩进入所述操作机器人203内部。
17.优选地,所述夹具309上设置有用于固定所述铰钻轴202的锁紧结构502。
18.优选地,所述铰钻轴202由轴503和多段轴套组成,相邻两段轴套通过万向节连接。
19.优选地,还包括智能设备1003,所述智能设备1003与所述控制器206有线或无线连接,对所述操作机器人203进行反馈、远程监测和远程控制。
20.优选地,所述限位通孔306至所述底盘304的边缘开设有开口槽。
21.根据本发明提供的固定在骨骼上的机器人辅助关节置换手术系统的使用方法,包括:将所述固定结构205固定在患者骨骼上,通过所述控制器206控制所述电钻204和所述操作机器人203工作。
22.与现有技术相比,本发明具有如下的有益效果:
23.由于机器人固定在骨骼上,能够随患者移动,因此精度很高,也无需固定患者或者连接动态参考。一旦术中注册完成,就不再需要位移跟踪,因为机器人会随着患者的关节一起移动。
24.患者不需固定或连接动态参考,使用简单方便。
25.采用的操作机器人结构小巧紧凑,紧贴手术部位,相较于传统的落地式或固定在手术床上的手术机器人只需要非常小的手术室空间。低惯性和小电机,不会伤害患者或手术室工作人员。
26.本发明可应用于其它关节手术,例如膝关节、肘关节、踝关节,以及脊柱手术(例如融合手术)。
27.本发明可通过移动设备、本地计算机网络和/或云等有线或无线通讯,为手术医生提供实时数据反馈和控制。
附图说明
28.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
29.图1为发明的结构示意图;
30.图2为操作机器人的结构示意图;
31.图3为操作机器人一端的安装示意图;
32.图4为操作机器人另一端的安装示意图;
33.图5为本发明在使用状态的示意图;
34.图6为本发明在使用状态的示意图;
35.图7为另一种操作机器人的结构示意图;
36.图8为另一种铰钻轴的结构示意图;
37.图9为操作机器人的几何原理图。
具体实施方式
38.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
39.当前披露涉及的是,固定在骨骼上的机器人辅助关节置换手术系统和其使用方法。作为骨科手术的一部分,本发明可应用于患者关节的任何区域。但是,为了容易理解,本文的讨论仅限于髋关节的细节,髋关节只是与本公开发明和实施例相关的示例。
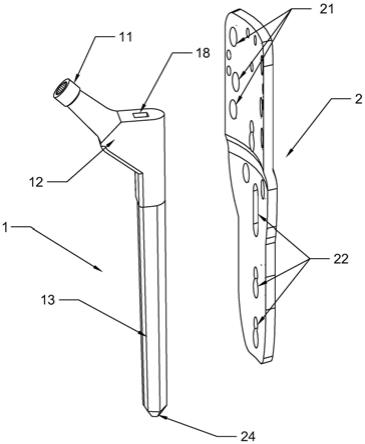
40.如图1、图2、图3和图4所示,本发明提供的一种固定在骨骼上的机器人辅助关节置换手术系统201,包括:电钻204、铰钻轴202、操作机器人203、固定结构205、髋臼锉103和控制器206。
41.电钻204的输出端通过铰钻轴202与髋臼锉103驱动连接,操作机器人203的第一端连接在铰钻轴202靠近电钻204的部分,铰钻轴202靠近髋臼锉103的部分为自由端,能够在操作机器人203第二端的限位通孔306中活动,固定结构205连接在操作机器人203上,控制器206与电钻204和操作机器人203电连接。控制器206内含有操作和控制操作机器人203、电钻204和其他工具(例如传感器)所需的电气、控制和电源系统。
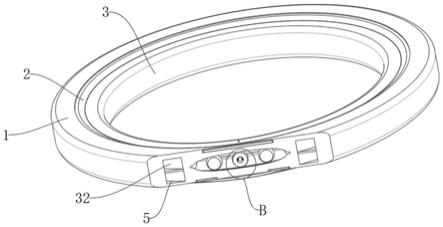
42.如图2、图3所示,操作机器人203包括:底盘304、顶盘308和多个线性致动器307。每个线性致动器307的两端分别通过连接件303连接在底盘304和顶盘308之间,统称为滑移铰。顶盘308上设置有用于连接铰钻轴202轴套的夹具309,底盘304上开设有限位通孔306,以及用于安装固定结构205的孔405。底盘304的外周设置有多个径向延伸的延伸部404,孔405开设于延伸部404上。连接件303可以是万向节、球形接头或旋转接头。
43.在髋关节置换过程中,使用固定结构205或类似于三脚架的支架将机器人辅助关节置换手术系统201安装到手术部位或附近的骨骼上。固定于骨骼的机器人可以很容易地适应不同的手术入路,因为机器人可与患者一起移动。机器人的高度可以通过调节手术台的高度来实现,以适应手术入路和手术医生。当外科医生控制动力系统和铰钻深度时,机器人辅助医生把髋臼锉103的轴保持在理想的轨迹上。
44.如图4所示,夹具309上设置有用于固定铰钻轴202的锁紧结构502,通过垂直固定铰钻轴202的轴套,同时允许铰钻轴202的轴503在电钻的驱动下能够旋转并沿轴线线性移动,实现髋臼锉103的前进和后退。如图5所示,固定结构205包括钻头、螺钉903、套管针或球形脚905,形成三脚支撑结构,实现稳定的支撑。底盘304通过螺钉903(或者配合球形脚905)固定在骨骼901上,因此是相对固定的,而顶盘308是相对可活动的。
45.在图1中,固定结构205连接在操作机器人203的第二端(靠近骨骼的一端),通过操作机器人203驱动髋臼锉103调整工作角度,此时第二端相对于骨骼是固定的,髋臼锉103活动范围较小,其优势在于铰钻时更为精准。
46.在图7上半部所示的实施例中,固定结构205连接在操作机器人203的第一端(远离骨骼的一端),除固定结构的连接位置区别外,其余结构不变,此时靠近骨骼的第二端可活动,因此髋臼锉103的活动范围更大。然而,过大的活动范围会导致髋臼锉103铰钻角度改变,从而影响铰钻效果。考虑到这种情况,如图8所示,本发明提供了另一种铰钻轴202的结构。铰钻轴202由轴503和多段轴套组成,相邻两段轴套通过万向节连接。在图8中,共有三段轴套,分别通过第一万向节911和第二万向节912连接,轴503穿设在轴套内部连接髋臼锉103。如此实现了偏置式髋臼锉,通常偏置式髋臼锉用于微创手术或外科手术入路(例如正前方),以保护软组织,并为外科医生手术提供方便的操作位置。然而,在保持理想的铰孔轨迹方面,偏置锉比直锉更难操作。
47.如图7下半部分所示,像这样的六足机械装置可以用来保持理想的轨迹,同时提供偏置锉的优势。该装置带有2个自由度的偏置锉,相对于轴503,髋臼锉103可产生偏置(偏角920和偏移930)。与图1所示的不同,图7中的机器人的顶盘308使用固定结构安装到骨骼上。这允许底盘304在手术部位附近自由移动。可以由外科医生手动完成或由6自由度六足机械装置自动完成平移或沿着理想轨迹轴922移动。
48.在一个实施例中,夹具309内或底盘304上设置有传感器(例如,感应式、线性可变差动变压器、光学、照相机、视觉系统等),传感器与控制器206电连接,检测施加到髋臼锉103上的横向力以及髋臼锉103的位置。向使用者(外科医生)或机器人控制器提供实时反馈,根据需要从初始位置进行任何深度、角度或偏移调整。在一个实施例中,传感器安装在底盘304上或底盘304的一部分上。例如,可以安装在底盘的两侧,用标记或槽口感测髋臼锉103金属轴位置的变化。限位通孔306的尺寸大于髋臼锉103的尺寸,线性致动器307在收缩状态下,髋臼锉103能够通过限位通孔306进入操作机器人203内部,为铰钻轴提供空间,使其能够在所有3个平面(x、y、z)内线性移动、定向或自由旋转。
49.在一个实施例中,限位通孔306的直径大于髋臼锉103的直径,髋臼锉103可以完全缩回到机器人内部。在另一个实施例中,底盘304上有限位通孔306和延伸出底盘边缘的开口槽,允许在机器人外部快速更换髋臼锉103,并且还容纳偏置铰钻轴。底盘中的限位通孔306允许机器人将铰钻轴202定向在特定手术入路的理想轨迹中。
50.如图6所示,在使用状态下,还包括智能设备1003,使用位于盆骨的两个销钉来建立初始轴轨迹。通过有线或无线通信1002(例如,有线网络、无线网络、蓝牙、蜂窝),一个或多个传感器测量实时数据,并将其传输到计算机(移动设备)、计算机系统、网络或云等智能设备1003。该实时数据可以显示在智能设备1003上,并且还可以用作机器人控制的反馈、远程监测、远程控制、外科医生的视觉和触觉反馈等。在此例中,外科医生正在手动控制手持式电钻,机器人正在控制或保持理想轨迹和深度,并实时显示在智能设备1003上。
51.如图9所示,操作机器人203采用六足机器人的几何原理如下,base缩写为b,platform简写为p。
52.p
b
,p
p
=基座中的铰链位置
53.r
b
,r
p
=铰链位置的螺距圆半径
54.α
b
,α
p
=伸缩杆与铰链位置之间的角度
55.z
p
=平台相对于基座的高度z
56.m=平台的关注点
57.铰链的坐标为:
[0058][0059][0060][0061][0062]
假设平台在关注点m产生位移
[0063]
dm=[dx dy dz drx dry drz]
t
[0064]
那么,平台铰链的平台位移可通过以下公式得到:
[0065][0066]
由于i3是3x3单位矩阵,q(drx,dry,drz)旋转平移的矩阵为
[0067][0068]
那么,移位的平台铰链位置为
[0069][0070]
那么,每一个伸缩杆的位移为
[0071][0072]
用这个逆运动学矩阵t
‑1就可以导出
[0073][0074]
这样就可以用以下公式算出六足运动
[0075][0076][0077]
请注意既包含平移,也包含旋转,这通常要求使用参考国际单位制的无量纲值。
[0078]
对于六足机械装置来说,运动范围很难捕捉,因为1个自由度的范围始终取决于其他自由度的状态。只看平移或旋转,那么这些范围就可以通过以下由顶点1
…
8撑起的类似
于立方体的多面体捕捉。对于给定的几何体,点2
…
7在xy/rxry平面上的投影是等边六边形。据此,这些顶点可进行数值重建。
[0079]
本发明提供的固定在骨骼上的机器人辅助关节置换手术系统的使用方法,包括:将所述固定结构205固定在患者骨骼上,通过所述控制器206控制所述电钻204和所述操作机器人203工作。
[0080]
本发明需要外科医生较少的培训,使用起来很直观,与传统的器械手术类似,而且占地面积小。该系统可与现有的常规手动仪器、定制仪器、传感器辅助系统、机器人系统和计算机辅助系统配合使用,不需要增加手术时间,并且比计算机系统支持的落地式和固定在床上的机器人辅助手术系统能获得更高的精度和安全性。此外,固定在骨骼上的机器人辅助手术系统可以通过移动设备、计算机系统、计算机网络或云等有线或无线通信提供实时数据,用于远程监控、显示、控制和反馈。
[0081]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0082]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。