1.本发明涉及一种医疗器械,更具体地涉及一种腔镜器械。
背景技术:
2.腔镜吻合器是一种外科器械,它的作用原理是通过两个对应的执行器(通常包括钉砧组件和钉仓组件)闭合以夹持组织,然后将吻合器钉仓中的金属缝合钉推出成形,将组织缝合在一起。在有些吻合器中,还装有一把切割刀,用于将缝合好的组织切断开。
3.随着技术的进步,传统手术方式逐渐转向腔镜手术。腔镜手术就是在腹部或胸部的不同部位做数个直径5~12毫米的小切口,通过这些小切口插入摄像镜头和各种特殊的手术器械,将插入腹腔内的摄像头所拍摄的腹腔内各种脏器的图像传输到电视屏幕上,外科医生通过观察图像,用各种手术器械在体外进行操作来完成手术。其中,腔镜吻合器在手术中扮演最关键的角色。
4.但是,腔镜手术也有局限性。由于腹腔或者胸腔内空间的限制,传统的直线腔镜吻合器在一些极端情况下,不能有效地到达手术部位进行夹持、横断、吻合组织,所以催生了吻合器执行器可转弯的腔镜吻合器。
5.上海逸思的腔镜吻合器能达到60
°
的转角,是目前转角度最大的腔镜吻合器,相较于美国柯惠45
°
转角的腔镜吻合器,逸思的腔镜吻合器能使医生能更高效地完成一些狭窄部位组织的切割缝合,但是逸思的腔镜吻合器转角度大小受限于推刀杆的限制无法再加大转角,因为推刀杆要求既要硬又要软,要求硬是为了能将推力更好地传递至切割刀,但也因此难以转角,要求软是为了转角度能大些,但却难以将推力很好地传递至切割刀;而随着手术机器人和单孔多通道手术的出现,对腔镜吻合器的转角度和灵活度都提出了更高的要求,为此未来的腔镜吻合器需要一种新的推动原理去满足所需的转角度和灵活度。
技术实现要素:
6.基于此,有必要针对未来手术机器人和单孔多通道手术的推广应用,提供一种新的推动原理,以实现更大转角(>60
°
)的腔镜吻合器和更加灵活的腔镜吻合器。
7.其技术方案如下:一种线推拉切割缝合的腔镜吻合器,包括执行部,其中所述执行部包括钉合组件、切割组件、连接组件、壳体组件;所述钉合组件包括钉仓件、钉砧件、缝合钉、推钉片、滑块,所述钉仓件与所述钉砧件可转动地闭合和张开,其中缝合钉、推钉片、滑块可移动地设置于钉仓件内;所述连接组件包括铰链、转向连接片;所述壳体组件包括上壳体、下壳体,其中所述上壳体与所述下壳体固定连接;所述钉合组件与壳体组件通过所述连接组件固定在一起,切割组件可滑动地固定于钉合组件和壳体组件中,通过所述切割组件推动滑块移动,而滑块推动推钉片移动,再推钉片推动缝合钉移动,最终缝合钉抵在钉砧件上成“b”字型以缝合组织;所述切割组件包括滑轮、切割刀体、控制杆接合筒、索,切割刀和控制杆接合筒通过索连接固定,滑轮固定于钉合组件和壳体组件上,而索则绕于滑轮上,可改变索的力的方向。
8.所述索为线绳,这种线绳推动原理和设计克服了原有推刀杆既要软又要硬的矛盾,通过线的推动以及滑块的方向转换,可以实现向前推动切割刀和往回拉回切割刀的功能,无需担心转角度数大而导致的推力不足,并且线绳本身就具有优异的柔性。
9.在实施例中,所述铰链上设置有一限位圆柱,所述限位圆柱上至少有三个孔,可容许索通过该孔与切割刀和控制杆接合筒连接固定,索通过这些孔可更好地在转角时,将拉力传递至切割刀,也能很好地限制索的位置。
10.优选地,所述滑轮为圆饼状,且滑轮上有圆弧槽,供索放置,所述滑轮分别固定于钉仓件、钉砧件、上壳体和下壳体,形成四个转向点。
附图说明
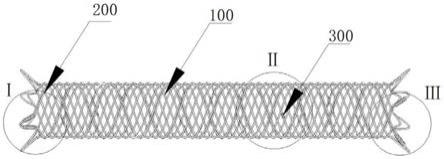
11.图1为本发明中执行部的整体示意图。
12.图2为本发明中执行部轴测图的爆炸视图以及滑轮、缝合钉、推钉片的局部放大图。
13.图3为本发明中执行部正视图的爆炸视图以及滑轮、缝合钉、推钉片的局部放大图。
14.图4为本发明中切割组件的轴测图。
15.图5为本发明铰链的爆炸视图。
16.图6为本发明滑轮的正视图。
17.图7为本发明执行部的剖视图以及滑轮位置的局部放大图。
18.图8为本发明切割组件向前纵向移动的正视图。
19.图9为本发明切割组件已经向前移动完全的正视图。
20.图10为本发明切割组件向后回退的正视图。
具体实施方式
21.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
22.在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
23.在本发明的描述中,需要理解的是,当一个元件被认为是“连接”另一个元件,可以是直接连接到另一个元件或者可能同时存在中间元件。相反,当元件为称作“直接”与另一元件连接时,不存在中间元件。
24.在本发明的描述中,a箭头代表的方向是纵向前移,b箭头代表的方向是纵向后移。
25.如图1至图4所示,一种线推拉切割缝合的腔镜吻合器,包括执行部0,其中执行部包括钉合组件1、切割组件2、连接组件3、壳体组件4;钉合组件1包括钉仓件11、钉砧件12、缝合钉13、推钉片14、滑块15,钉仓件11与钉砧件12可转动地闭合和张开,其中缝合钉13、推钉
片14、滑块15可移动地设置于钉仓件11内;连接组件3包括铰链31、转向连接片32;壳体组件4包括上壳体41、下壳体42,,其中上壳体41与下壳体42固定连接;钉合组件1与壳体组件4通过连接组件3固定在一起,切割组件2可滑动地固定于钉合组件1和壳体组件4中,通过所述切割组件2推动滑块15移动,而滑块15推动推钉片14移动,再推钉片14推动缝合钉13移动,最终缝合钉13抵在钉砧件12上成“b”字型以缝合组织;
26.切割组件2包括滑轮21、切割刀22、控制杆接合筒23、线绳24,切割刀22和控制杆接合筒23通过线绳24连接固定,滑轮21固定于钉合组件1和壳体组件4上,而线绳24则绕于滑轮21上,可改变线绳24的力的方向。
27.外科缝合器还包括一控制杆5和转角杆6,其中控制杆5可与控制杆接合筒23卡合,并控制控制杆接合筒23移动,转角杆6与铰链31固定连接,可控制钉合组件1转角。
28.如图5所示,铰链31上设置有一限位圆柱311,限位圆柱311上至少有三个孔3111,可容许线绳24通过该孔3111与切割刀22和控制杆接合筒23连接固定,线绳24通过这些孔3111可更好地在转角时,将拉力传递至切割刀22,也能很好地限制线绳24的位置。
29.如图6和图7所示,滑轮21为圆饼状,且滑轮21上有圆弧槽211,供线绳24放置,滑轮21分别固定于钉仓件11、钉砧件12、上壳体41和下壳体42,形成四个转向点。
30.如图8至图10所示,当控制杆5沿a方向移动时,则带动切割刀22沿a方向移动,使切割刀22执行切割功能;当完成切割功能后,控制杆5沿b方向移动,带动切割刀22沿b方向移动,即回归原位。
31.这种线绳推动原理和设计克服了原有推刀杆既要软又要硬的矛盾,通过线绳24的推动以及滑块21的方向转换,可以实现向前推动切割刀22和往回拉回切割刀22的功能,无需担心转角度数大而导致的推力不足,并且线绳24本身就具有优异的柔性。
32.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
33.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。