1.本发明涉及冲击波理疗领域,具体涉及一种具有视觉导航的精准区域理疗体外冲击波治疗仪。
背景技术:
2.随着科学技术的发展,冲击波在医疗领域的应用越来越广泛,主要应用有:全身系统中的肿瘤及癌细胞冲击疗法;骨骼系统的肩周炎、网球肘、髌腱炎、跟痛症;泌尿系统的体外冲击波碎石治疗等等。但是一般在治疗时,都需要专业人员手持冲击波治疗枪对患处进行治疗,造成医疗人员的浪费。
技术实现要素:
3.本发明的目的是提供一种具有视觉导航的精准区域理疗体外冲击波治疗仪,以解决手持冲击波治疗枪对患处进行治疗,需要人员,并且操作不方便的问题。
4.为实现上述目的,本发明采用如下技术方案:
5.一种具有视觉导航的精准区域理疗体外冲击波治疗仪,包括,支撑床、第一扫描箱、第二扫描箱、治疗仪主体、移动组件和摄像机;
6.所述支撑床上固定连接有多个压力传感器,压力传感器的上侧均固定连接有支撑板,相邻两个支撑板之间有空隙;
7.所述第一扫描箱位于所述支撑床的一端,所述第一扫描箱内滑动连接有第一安装板,所述第一安装板的长度方向垂直于所述支撑床的表面,所述第一安装板上固定连接有多个距离传感器,多个所述距离传感器沿所述第一安装板长度方向设置;
8.所述第二扫描箱位于所述支撑床的一侧,所述第二扫描箱内滑动连接有第二安装板,所述第二安装板的长度方向垂直于所述支撑床的表面,所述第二安装板上固定连接有多个距离传感器,多个所述距离传感器沿所述第二安装板长度方向设置,所述第二扫描箱上侧固定连接有第一导轨;
9.所述治疗仪主体位于靠近所述第二扫描箱的一侧,所述治疗仪主体内固定连接有冲击波发生器,所述治疗仪主体上侧固定连接有第二导轨,所述治疗仪主体的上侧开设有滑槽,所述滑槽内转动连接有丝杠,所述丝杠的一端与驱动电机传动连接,所述驱动电机与所述治疗仪主体的一侧固定连接,所述丝杠螺纹连接有滑块,所述滑块位于所述滑槽内;
10.所述移动组件包括底座、机械臂、连接头,所述底座的下侧开设有两个导轨槽,两个所述导轨槽分别与所述第一导轨和所述第二导轨滑动连接,所述底座的一端与所述滑块固定连接;所述机械臂的一端与所述底座固定连接,所述机械臂的另一端与所述连接头一端固定连接,所述连接头另一端上分别固定连接有摄像机和冲击波治疗枪;
11.所述摄像机用于对治疗位置进行识别,所述冲击波治疗枪与所述冲击波发生器电性连接。
12.进一步地,所述第一扫描箱内底端固定连接有第一导槽,所述第一扫描箱内靠近
上端的位置,沿所述第一扫描箱长度方向上转动连接有第一丝杠,所述第一丝杠上螺纹连接有第一滑块,所述第一安装板的上端与所述第一滑块固定连接,所述第一安装板的下端位于所述第一导槽内,并与所述第一导槽滑动连接,所述第一扫描箱一侧固定连接有第一驱动电机,所述第一驱动电机与所述第一丝杠驱动连接。
13.进一步地,所述第二扫描箱内底端固定连接有第二导槽,所述第二扫描箱内靠近上端的位置,沿所述第二扫描箱长度方向上转动连接有第二丝杠,所述第二丝杠上螺纹连接有第二滑块,所述第二安装板的上端与所述第二滑块固定连接,所述第二安装板的下端位于所述第二导槽内,并与所述第二导槽滑动连接,所述第二扫描箱一侧固定连接有第二驱动电机,所述第二驱动电机与所述第二丝杠驱动连接。
14.进一步地,所述连接头采用旋转气缸,所述连接头的固定端与所述机械臂固定连接,所述连接头的旋转端上固定连接有连接板,所述连接板的两端位置分别固定连接有摄像机和冲击波治疗枪。
15.进一步地,所述治疗仪主体远离所述支撑床的侧面上固定连接有显示屏和操作面板。
16.进一步地,所述机械臂为六自由度机械臂。
17.进一步地,所述连接头上包括角度传感器和位移传感器。
18.进一步地,所述支撑板覆盖所述支撑床的上表面。
19.本发明的有益效果:
20.当有人在支撑床上时,对于不同的支撑板的压力不同,不同支撑板下侧的压力传感器的数值也不同,根据压力传感器检测的压力大小,能够判断上侧人员的体重、身高、在支撑床上的姿势和在支撑床上的大概位置。通过第一扫描箱和第二扫描箱能够具体的判断人员的位置,并且能够给出相关位置的定位,并且两个位置相互印证,避免误判;治疗仪主体内安装有冲击波发生器,冲击波发生器连接有冲击波治疗枪,移动组件在能够运送冲击波治疗枪到达前面步骤确定的准确的位置并且对该位置进行冲击波治疗。如果实验人员在理疗过程中移动,则再次对实验人员位置进行定位。通过上述的操作,在对实验人员进行理疗时,不需要人工参与,节省人力。
附图说明
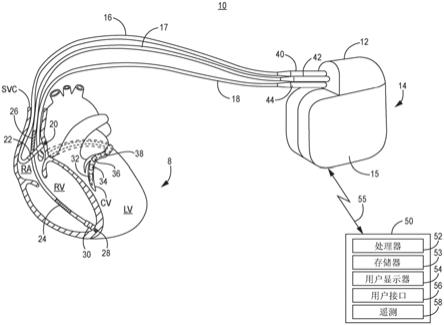
21.图1是一种具有视觉导航的精准区域理疗体外冲击波治疗仪整体结构示意图;
22.图2是一种具有视觉导航的精准区域理疗体外冲击波治疗仪机械臂部分结构示意图;
23.图3是一种具有视觉导航的精准区域理疗体外冲击波治疗仪另一角度整体结构示意图。
24.图中各标记对应的名称:
[0025]1‑
支撑床;11
‑
支撑板;2
‑
第一扫描箱;21
‑
第一安装板;22
‑
距离传感器;23
‑
第一驱动电机;24
‑
第一导槽;3
‑
第二扫描箱;4
‑
治疗仪主体;41
‑
显示屏;42
‑
操作面板;5
‑
移动组件;51
‑
第一导轨;52
‑
第二导轨;53
‑
丝杠;54
‑
滑块;55
‑
底座;56
‑
机械臂;57
‑
摄像机;58
‑
冲击波治疗枪;59
‑
连接头;6
‑
驱动电机。
具体实施方式
[0026]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0027]
本发明的实施例:
[0028]
参见附图1
‑
3,一种具有视觉导航的精准区域理疗体外冲击波治疗仪,包括,支撑床1、第一扫描箱2、第二扫描箱3、治疗仪主体4、移动组件5和摄像机57。
[0029]
支撑床1上固定连接有多个压力传感器,压力传感器的上侧均固定连接有支撑板11,相邻两个支撑板11之间有空隙;支撑板11覆盖支撑床1的上表面。当有人在支撑床1上时,对于不同的支撑板11的压力不同,不同支撑板11下侧的压力传感器的数值也不同,根据压力传感器检测的压力大小,那能够判断上侧人员的体重、身高、在支撑床1上的姿势和在支撑床1上的大概位置。
[0030]
第一扫描箱2位于支撑床1的一端,第一扫描箱2内底端固定连接有第一导槽24,第一扫描箱2内靠近上端的位置,沿第一扫描箱2长度方向上转动连接有第一丝杠,第一丝杠上螺纹连接有第一滑块,第一安装板21的长度方向垂直于支撑床1的表面,第一安装板21上固定连接有多个距离传感器22,多个距离传感器22沿第一安装板21长度方向设置,第一安装板21的上端与第一滑块固定连接,第一安装板21的下端位于第一导槽24内,并与第一导槽24滑动连接,第一扫描箱2一侧固定连接有第一驱动电机23,第一驱动电机23与第一丝杠驱动连接。通过第一驱动电机23能够使第一安装板21在前后方向上移动,从而通过多个距离传感器22能够确定人员在支撑床1上的宽度和人员的厚度,并且定位人员的具体位置。
[0031]
第二扫描箱3内底端固定连接有第二导槽,第二扫描箱3内靠近上端的位置,沿第二扫描箱3长度方向上转动连接有第二丝杠,第二丝杠上螺纹连接有第二滑块,第二安装板的上端与第二滑块固定连接,第二安装板的下端位于第二导槽内,并与第二导槽滑动连接,第二扫描箱3一侧固定连接有第二驱动电机,第二驱动电机与第二丝杠驱动连接。第二安装板的长度方向垂直于支撑床1的表面,第二安装板上固定连接有多个距离传感器22,多个距离传感器22沿第二安装板长度方向设置,通过第二驱动电机能够使第二安装板在前后方向上移动,从而通过多个距离传感器22能够确定人员在支撑床1上的长度,并且定位人员的具体位置,第二扫描箱3内部的结构与第一扫描箱2内部的结构相似,第二扫描箱3的内部结构相对于第一扫描箱2的内部结构只有长度的区别,在图1中对第二扫描箱3的内部结构进行了省略。
[0032]
治疗仪主体4远离支撑床1的侧面上固定连接有显示屏41和操作面板42,治疗仪主体4位于靠近第二扫描箱3的一侧,治疗仪主体4内固定连接有冲击波发生器,治疗仪主体4的上侧开设有滑槽,滑槽内转动连接有丝杠53,丝杠53的一端与驱动电机6传动连接,驱动电机6与治疗仪主体4的一侧固定连接,丝杠53螺纹连接有滑块54,滑块54位于滑槽内。
[0033]
移动组件5包括底座55、机械臂56、连接头59,底座55的下侧开设有两个导轨槽,第二扫描箱3上侧固定连接有第一导轨51;治疗仪主体4上侧固定连接有第二导轨52,两个导轨槽分别与第一导轨51和第二导轨52滑动连接,底座55的一端与滑块54固定连接;连接头59采用旋转气缸,连接头59的固定端与机械臂56的一端固定连接,连接头59的旋转端上固定连接有连接板,连接板的两端位置分别固定连接有摄像机57和冲击波治疗枪58。机械臂56的另一端与底座55固定连接,冲击波治疗枪58与冲击波发生器电性连接。通过驱动电机6
能够使机械臂56沿着第一导轨51长度方向运动,使得机械臂56能够到达更多的位置,摄像机57对指定的位置进行识别,在识别完成后连接头59转动,冲击波治疗枪58转动到谁信那摄像机57位置,对摄像机57识别的位置进行冲击波治疗。
[0034]
机械臂56为六自由度机械臂56。能够到达更多的位置,连接头59上包括角度传感器和位移传感器,通过传感器判断连接头59在工作过程中是否有晃动,避免产生不精准的情况。
[0035]
本发明的使用方法:
[0036]
首先,实验人员躺在支撑床1上,通过各个压力传感器显示的压力的大小确定实验人员躺的具体位置,第一驱动电机23启动,第一安装板21从左向右移动,通过第一安装板21上的距离传感器22的数据确定实验人员的厚度和宽度,第二驱动电机启动,第二安装板从前向后移动,通过第二安装板上的距离传感器22的数据确定实验人员的厚度和长度,比较压力传感器最后的位置数据和距离传感器22的位置数据,当两个数据不吻合重复上述操作,当两个数据吻合时进行以下操作。
[0037]
实验人员需要理疗的位置为肩膀,通过上述的数据大致确定了肩膀的位置,启动驱动电机6,驱动电机6带动底座55和机械臂56移动,将机械臂56移动到的位置和确定的肩膀位置横坐标相同时,驱动电机6停止转动,机械臂56控制连接头59到肩膀位置的上侧,摄像机57启动,摄像机57对肩膀进行识别,识别完成后连接头59转动,冲击波治疗枪58对阵识别位置,机械臂56控制冲击波治疗枪58对指定位置进行理疗。
[0038]
本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上做任何变化,凡是具有与本技术相同或相近似的技术方案,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。