供给系统
1.相关申请的交叉引用该申请要求享有于2019年2月12日提交的编号为62/804,366的美国临时申请的权益,该美国临时申请的全部内容通过引用并入本文。
背景技术:
2.典型的供给系统屈从于各种缺陷,包括仅分配干食物的能力,或仅允许暴露湿食物的单个容器的能力。许多供给系统不能够随着时间的推移打开一个或多个密封的包括湿食物的食物罐使得动物可接近最近打开的食物罐进行供给。它们也不能够将打开的食物存放在专门的位置,以最大限度地减少变干和细菌生长。
3.所期望的是一种用于随着时间的推移对各种动物供给若干密封的食物罐的系统和方法。本公开内容的实施例提供解决上面的和其它的问题的方法。
技术实现要素:
4.本公开内容涉及构造成分配罐装食品的供给系统。
5.本公开内容还涉及一种供给系统。该供给系统包括壳体,该壳体基本上形成供给系统的外部表面,在壳体内部包括:臂,其构造成顺时针和逆时针旋转到多个位置,其中臂构造成支承罐;开罐器,其在多个位置中的第一位置处;以及壳体的开口,其在多个位置中的第二位置处。
附图说明
6.通过对以下其图的引用将更好地理解本公开内容:这里将增加所有图的简短描述。
7.图1a
‑
1c是供给系统的实施例的顶视图和前视图。
8.图2a
‑
2i是在操作期间的供给系统的实施例的顶视图、左侧视图、右侧视图和前视图。
9.图3a
‑
3d是在操作期间的供给系统的实施例的侧视图和顶视图。
10.图4a和4b是供给系统的另一实施例的透视图。
11.图5是供给系统的实施例的透视图。
12.图6a
‑
6f是供给系统和罐滑槽的元件的视图。
13.图7是各种罐位置的说明。
14.图8a
‑
8c是支承臂的透视图。
15.图9是边缘检测元件的透视图。
16.图10a和10b是开罐器的透视图。
17.图11是开口覆盖物的下侧视图。
18.图12是封盖臂的截面视图。
具体实施方式
19.现在将通过参照附随本技术的以下论述和图来更详细地描述本技术。要注意,本技术的图仅出于说明性的目的来提供,且因而图未按比例绘制。还要注意,相似和对应的元件由相似的参考标号表示。
20.在以下描述中,阐述许多特定细节,如特定结构、构件、材料、尺寸、处理步骤和技术,以提供对本技术的各种实施例的理解。然而,将由本领域普通技术人员所了解的是,可在没有这些特定细节的情况下实施本技术的各种实施例。在其它情况下,为了避免混淆本技术,没有详细描述众所周知的结构或处理步骤。
21.将理解,当作为层、区域或衬底的元件称为在另一元件“上”或“上方”时,它可直接在另一元件上,或也可存在中间元件。相反,当一个元件称为“直接在另一元件上”或“直接在另一元件上方”时,不存在中间元件。还将理解,当一个元件称为在另一元件“下”或“下方”时,其可直接在另一元件下或下方,或可存在中间元件。相反,当一个元件称为“直接在另一元件下”或“直接在另一元件下方”时,不存在中间元件。
22.在本文的论述和权利要求书中,用语“约”表示所列出的值可有所改变,只要该改变不导致过程或结构与所示出的实施例的不一致。例如,对于某些元件,用语“约”可指
±
0.1%的变化,对于其它元件,用语“约”可指
±
1%或
±
10%,或其中的任何点的变化。
23.如本文所用,用语“基本上”或“基本”在以否定含义使用时同样适用,以指完全或几乎完全没有动作、特征、性质、状态、结构、项目或结果。例如,“基本上”平坦的表面将是完全平坦的,或是几乎平坦的使得效果将如同它是完全平坦的那样。
24.如本文所用,如“一个”、“一种”和“该”之类的用语不意在仅指单个实体,而是包括可使用特定示例来用于说明的总体类别。
25.如本文所用,以单数形式定义的用语意在包括以复数形式定义的那些用语,且反之亦然。
26.本文对任何数字范围的引用明确地包括由该范围所包含的每个数字值(包括小数和整数)。为说明,本文引用的“至少50”或“至少约50”的范围包括50、51、52、53、54、55、56、57、58、59、60等的整数,以及小数50.1、50.2、50.3、50.4、50.5、50.6、50.7、50.8、50.9等。在进一步说明中,本文引用的“小于50”或“小于约50”的范围包括整数49、48、47、46、45、44、43、42、41、40等,以及小数49.9、49.8、49.7、49.6、49.5、49.4、49.3、49.2、49.1、49.0等。在又一说明中,本文引用的“从5到10”的范围包括整数5、6、7、8、9和10等,以及小数5.1、5.2、5.3、5.4、5.5、5.6、5.7、5.8、5.9等。
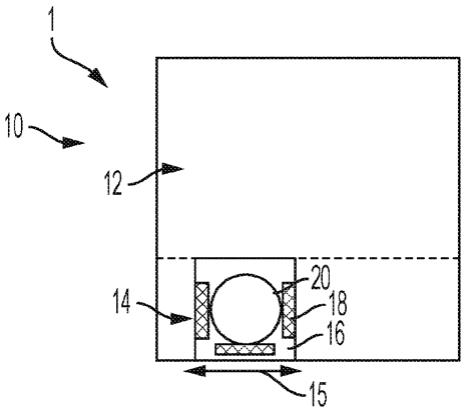
27.如本文所用,用语“罐装食品”或“罐”是指包含可食用产品和/或药物产品的任何金属或金属容器(以及具有薄膜覆盖物的塑料容器)。图1a是供给系统1的实施例的下托盘10的顶视图,其中出于说明的目的移除在下托盘竖直上方的元件。下托盘的后部12构造成包含各种电气元件(如布线、保险丝、电气接收元件、变压器等)、各种计算元件(如处理器、存储器、无线发射器等)、一个或多个马达和可选的一个或多个电池。
28.前部14包括面板16,该面板构造成沿箭头15的方向滑动。面板16可通过由柱或可接触面板16并使其移动的其它元件推动而滑动。该设置的一个示例是面板16接触两个柱,一个导致面板16沿箭头15的一个方向滑动,另一个导致面板16沿箭头15的相反方向滑动。备选地,螺杆元件可旋转并使面板16沿箭头15的每个方向滑动。
29.可操作地连接到面板的是多个缓冲器18。在该实施例中,示出三个缓冲器,在其它实施例中,可包括两个、四个或更多个缓冲器。这些多个缓冲器18构造成移入和移出面板的中心并且构造成接触罐20的外部表面。多个缓冲器18的尺寸和形状可变化,并且可移动以适应不同尺寸的罐。
30.在一个实施例中,多个缓冲器18是滚动圆柱体,其从面板16竖直延伸并且具有连接到面板16下方的齿轮(未示出)的中心推动元件。随着齿轮旋转,多个缓冲器18中的每个的中心推动元件移动得更接近在一起或进一步分开,其取决于齿轮旋转所在的方向。多个缓冲器18中的每个可包括传感器(未示出),该传感器配置成感测多个缓冲器18中的每个与罐20之间的压力。基于多个缓冲器18中的每个的已知位置和由传感器测量的压力,供给系统1可确定面板16上的罐的尺寸。
31.如图1a中示出的,面板16在第一位置,但在图1b中,面板16在第二位置。该第二位置允许由例如狗或猫从供给系统外部接近罐20。覆盖物(未示出)典型地在第二位置竖直上方,但在面板16从第一位置移动到第二位置时,覆盖物打开。备选地,面板16可延伸到系统的外部部分,使得它从外封壳突出以呈现罐的内容物。
32.覆盖物可以以任何合适的方式打开,如通过从处理器、应用程序、接近传感器、基于云的程序、面部识别程序或调度接收信号,以在特定时间打开或关闭的一天。在其它实施例中,覆盖物可由用户手动打开,或可接触覆盖物的一部分,触发覆盖物移动。
33.图1c是底部托盘10的侧视图。在该视图中,可看到面板16和多个缓冲器18(没有罐)。当面板16在第一位置时,在面板16的竖直下方的是盖容置部24,其构造成接纳多个盖22。一旦盖22从罐移除,同时罐在第一位置,如下面进一步描述的,盖22保持在适当位置直到面板16移动到第二位置(如图1b中示出的)。然后盖22释放并竖直下落到盖容置部中。
34.图2a中示出中部托盘40,图2a是实施例的另一视图并且在前部44中包括如上面提到的覆盖物48。前部44还包括开罐器46,其将在下面进一步论述。后部42包括满罐容置部50和已开罐容置部52。下面更全面地论述中部托盘40及其操作。
35.图2b中示出底部托盘10和中部托盘40的前侧视图。如可看到的,开罐器46位于面板16的竖直上方(面板16的第一位置)并且定位成与罐的盖(未示出)相互作用并移除罐的盖。
36.一旦盖已由开罐器46移除,开罐器46构造成保持盖一段时间,至少在面板从第一位置(图2b)移动到第二位置(图2c)的时间段内。盖可以以任何合适的方式靠着开罐器保持就位,如通过施加吸力和/或磁力或任何其它合适的机械方式,如通过穿刺、抓臂、夹子等。一旦面板图16位于图2c中的第二位置处,盖从开罐器46释放并且朝盖容置部24竖直下落。
37.图2d是供给系统1的左侧视图。如可看到的,满罐容置部50包括一个或多个满罐53(在该实施例中,例如,7个罐)。在该申请中,“满罐”是指任何合适尺寸的任何合适的罐,其具有可用开罐器移除的盖。
38.可选地,罐容置部50的侧部可容纳在张力下的移动缓冲器,其通过减缓罐沿容置部的下落来辅助罐的再填充。此外,这些缓冲器可用于感测罐的尺寸并将此类信息传达给供给系统1的处理器。备选地,满罐容置部50和已开罐容置部52可侧向打开以允许手动堆叠和移除罐,而不是使罐从顶部和/或底部滑入和滑出。
39.在图2d中,通过沿箭头54的方向推动(或拉动)满罐53的马达(未示出)将满罐53从
满罐容置部50移动到面板16上。缓冲器18然后移动以接触罐,然后开罐器46移除盖,面板16移动到第二位置,并且盖从开罐器46释放到盖容置部24中。
40.图2e(其为供给系统1的右侧视图)中示出在第二位置的面板。在该位置,盖48可移动,允许从供给系统1外部接近已开罐55。在该申请中,“已开罐”是指任何先前的“满罐”,其使盖移除,而无论已开罐内的内容物的体积。
41.在图2e中,在已开罐容置部52的极顶部处的是柄部61。柄部61可为固定的,或它可向下折叠。
42.在柄部61的内部(或在柄部的顶部上或附近)是按钮63,其可由用户的手激活。按钮63可操作地连接到多个单向阀60,下面进一步描述。当按下按钮63时,每个单向阀60将向上、向下、侧向枢转或以任何方式缩回以允许罐离开已开罐容置部52。
43.此外,已开罐容置部52通过已开罐容置部52的底部与供给系统1之间的螺纹和螺杆相互作用来连接到供给系统1。与供给系统1相比,已开罐容置部52可通过抓住柄部61并在逆时针方向上扭转它来从供给系统1移除。备选地,已开罐容置部52可通过锁定机构连接到供给系统1,当一个或多个按钮和/或杆拉动或推动时,该锁定机构可释放。
44.在一段时间后(或通过编程到供给系统1中的时间范围或通过经由互联网连接到供给系统1的应用程序或通过供给系统1上的物理按钮手动控制),盖48关闭,并且已开罐55沿箭头56的方向移动到已开罐容置部52中。一旦在已开罐容置部52中,已开罐55由活塞58竖直向上移动,活塞延伸(如图2f中示出的)并接触已开罐55的底面,导致已开罐55移动通过单向阀60中的一个。活塞58然后缩回,同时已开罐55保持在单向阀60竖直上方,如图2g中示出的。单向阀60中的每个可构造成在已开罐容置部52内的任何合适位置处并且可由任何合适的材料形成。此外,图中示出的单向阀60的数量仅出于说明性的目的,供给系统1可包括更多或更少的这些单向阀60。
45.一旦另一已开罐59准备好进入已开罐容置部52,下一已开罐59沿箭头56的方向移动,活塞58伸出,下一已开罐59竖直向上移动并接触第一已开罐55的底面和单向阀60两者,使第一已开罐55向上移动并由下一单向阀60(或由下一已开罐59)和下一已开罐59保持在第一单向阀60上方。然后活塞58缩回,使得第一已开罐55和下一已开罐59都保持在已开罐容置部52内,如在图2i中看到的。对于已开罐容置部52可容纳的每个空间体积,可重复该过程。
46.图3a
‑
3d提供该实施例的下一已开罐59的移动的更详细视图。在图3a
‑
3d中的每个中,上图是供给系统1的右侧视图,而底部图是供给系统1的中部托盘40的顶视图。
47.在图3a中,已开罐55已经在已开罐容置部52内。在一段时间之后,下一已开罐59将移动到已开罐容置部52上。为实现该移动,从中部托盘40的一侧顺时针旋转臂62。该臂62可为任何合适的尺寸和形状,并且可不包括关节,包括一个或多个关节。如可从图3a的顶部图看到的,臂62构造成竖直地越过缓冲器18,但仍接触下一已开罐59。在另一实施例中,可驱动钩状元件(未示出)以钩住已开罐55并将已开罐55拉入已开罐容置部52中。钩状元件可放置在罐55的上方或下方。
48.图3b示出在通过它行进距离的约半途处的臂62,随着它继续沿顺时针方向旋转,下一已开罐59从其在面板16上的原始位置移向已开罐容置部52。
49.图3c示出在它行进距离结束处的臂62,其导致下一已开罐59朝已开罐容置部52移
过缓冲器18。在这时,突出部64朝下一已开罐59竖直向上延伸。臂62然后可逆时针旋转回到在图3a中看到的位置。再次参照图3c,突出部64接触下一已开罐59的侧表面,且然后突出部64朝已开罐容置部52移动。
50.在图3d中,在一个或多个可选引导件66的帮助下,突出部64延伸其行进距离并且使得下一已开罐59进入已开罐容置部52。突出部然后可返回到在图3a中看到的位置。
51.虽然图中未示出,供给系统1可包括若干其它元件,这些元件可以以任何合适的方式并入供给系统1中或附近。这些额外元件的一些示例包括用于控制供给系统1的各种元件的显示屏和手动和/或触摸屏按钮。在其它实施例中,供给系统1可包括相机和互联网连接(有线或无线),使得用户可从远程位置访问相机并查看供给系统1及其环境(包括动物)的图像或视频。该相机可通过应用程序或程序激活,并且可在指定时间或响应触发(如运动感测)捕获图像和/或视频。可建立链接以激活相机以进行实时查看,无论动物是否在场。
52.除了相机之外,供给系统1可包括一个或多个扬声器和一个或多个麦克风以允许捕获声音以及将声音从用户传输到供给系统1。还可增加声音和语音的录音以允许用户定制给宠物的消息。
53.通过有线或无线互联网接入,供给系统1可在发生供给时告知用户并且可提供用传感器收集的额外数据。收集并发送至用户的数据的类型可取决于软件和用户设置来变化。此类信息可通过为供给系统开发的特定应用程序、文本、电子邮件和/或其它社交媒体或用户可设置的通信偏好来递送。此类数据还可通过物理上位于供给系统上的显示器访问或在网站门户上可用并存储在云上。
54.虽然上面描述的供给系统1构造成打开食品罐,供给系统1可包括额外的可接近的容置部,以用于分配各种干食品、零食、罐延伸槽和/或水。
55.供给系统1内的各种传感器可选地还可配置为收集关于供给系统1内部和外部的湿度水平、供给系统1的温度、动物的供给模式,如食用/浪费的量、喜欢的食物口味、动物进食的次数以及它们的确切进食时间等等。
56.图4a中示出供给系统100的另一实施例。如可看到的,供给系统100基本上是圆形的(然而还可包括任何合适形状的壳体和任何合适形状的内部构件)并且可包括若干构件。供给系统100包括由任何合适的材料(如塑料、金属、玻璃、陶瓷、橡胶、碳基材料及其组合)形成的合适的壳体110,以及基部120。壳体110可由具有合适形状的单片材料或可以以任何合适的方式彼此连结的多片材料形成。如下面论述的,壳体110可包括壳体开口300,罐可通过壳体开口暴露。基部120构造成附接到并支承壳体110,以及支承壳体110内的其它构件。
57.图4b示出其中移除壳体110的供给系统100。如可看到的,在由壳体110封闭的空间内,多个构件由基部120支承。示出滑槽壳体141,其包含罐滑槽(下面更详细地论述)。下面更详细地论述图4b中可见的其它单独构件。
58.图5中示出供给系统100内的若干构件的放大视图。一个构件是图6a中示出的罐滑槽130,其通过罐滑槽支承件140支承到基部120。罐滑槽130可至少部分或完全由滑槽壳体141包围。滑槽壳体141可支承供给系统100的各种其它元件,如将在下面描述的控制装置160。罐滑槽130可由任何合适的材料(如塑料、金属、玻璃、陶瓷、橡胶、碳基材料以及它们的组合)形成,并且可由用户和/或餐具清洗设备冲洗和/或清洗。
59.图6a仅示出从滑槽壳体141和供给系统100移除后的罐滑槽130。罐滑槽130包括密
封罐筒132和已用罐筒134。密封罐筒132和已用罐筒134中的每个都具有尺寸设计成容纳任何合适尺寸的罐的直径。另外,如果该罐的直径小于密封罐筒132和已用罐筒134中一者或两者的直径,密封罐筒132和已用罐筒134中的一者或两者可容纳可围绕罐的直径延伸的间隔件(未示出)。在一些实施例中,密封罐筒132和已用罐筒134中的一者或两者可渐缩,使得它们的直径在一端处与另一端相比较小。在另一实施例中,密封罐筒132和已用罐筒134的侧部可由多个面板组成,这允许其膨胀和收缩以容纳任何尺寸的罐,包括同时容纳多个不同尺寸的罐。
60.密封罐筒132和已用罐筒134中的每个都具有尺寸设置成容纳任何合适尺寸的罐的长度。例如,密封罐筒132和已用罐筒134中的每个的尺寸可设置成容纳1、2、3、4、5、6、7、8、9、10、11、12、13、14、15或更多个竖直堆叠的罐。合适罐的两个非限制性示例是5.5盎司罐和3盎司罐。
61.下面提供使用罐滑槽130的示例。在该示例中,罐滑槽130完全没有罐。作为第一步骤,罐滑槽130从供给系统100中移除。供给系统100可包括附接到壳体110的盖(在图6b和6c中示出),其基本上覆盖罐滑槽130。用户然后将罐滑槽130的一部分竖直拉出供给系统100。用户然后可沿箭头136的方向将密封的罐(未示出)放入密封罐筒132中。然后密封罐竖直下落,直到其接触密封罐卡扣138。密封罐卡扣138充分支承加到密封罐筒132的每个密封罐。图6d示出从竖直上方看的密封罐筒132的更详细视图。
62.图6b是成闭合构造并且与壳体110接触的盖139的下侧的视图。盖闩锁143通过使盖闩锁143的一部分与壳体110的卡扣接触来保持盖139与壳体110接触。用户可使盖闩锁143在箭头145的方向上滑动,从而使盖闩锁143的与壳体110的卡扣接触的部分脱离接合。图6c中示出,然后可将盖139置于打开构造中。成图6c中示出的打开构造的盖允许由用户接近罐滑槽130。
63.在一些实施例中,密封罐卡扣138可包括减震元件、设计在元件中的曲率,其可构造成吸收沿箭头136方向的增加罐的至少一些冲击。密封罐卡扣138在图6e中单独示出。
64.还提供使用罐滑槽130的另一示例。在该示例中,已用罐筒134在箭头142的方向上接收一个或多个罐并且搁置在已用罐卡扣144上(下面将更详细地描述已用罐的该接收)。图6f示出从竖直上方看的已用罐筒134的更详细视图。
65.作为第一步骤,罐滑槽130由用户从供给系统100移除。用户将打开盖139并通过它的柄部137将罐滑槽130拉出。然后可将罐滑槽130保持在垃圾容置部上方,并且用户按下罐释放按钮147。按下罐释放按钮147会使释放杆149竖直向下移动,并且接触已用罐卡扣144。该接触导致已用罐卡扣144水平移动离开已用罐筒134的内部,并且已用罐筒134内的一个或多个已用罐沿箭头方向竖直下落并从已用罐筒134中掉出146。现在所有已用罐移除,并且已用罐筒134不再容纳任何已用罐或盖。用户可使新的密封罐负载到空的密封罐筒132中,并且罐滑槽130可放回供给系统100。罐滑槽130将滑入罐滑槽壳体141。罐滑槽壳体141可为直的或可在底部处渐缩以容易地引导罐滑槽130。
66.再次参照图5,可看到罐滑槽130,其中密封罐筒132和已用罐筒134中的每个的外部都在罐滑槽壳体141下方可见。罐通过离开密封罐筒132的底部(沿图6a的箭头148的方向)到支承臂180(其在下面进一步描述和示出)上而进入供给系统100的内部,而支承臂在第一位置。
67.出于示例性目的并且为帮助理解,图7是大体上示出支承臂180可旋转到并保持处于的五个位置的图形表示,但没有按比例。出于清楚的目的,所有位置可以以任何方式配置在其它位置之前或之后,且虽然仅示出5个位置,可根据需要有更多或更少的位置。图7是供给系统100的顶视图,其中标注位置,但不按比例或意在限制支承臂180的任何位置的实际位置。典型地,罐(未示出)从位置“a”行进到位置“b”、位置“c”、位置“d”、位置“e”,这些位置将在下面论述。
68.第一位置“a”在密封罐筒132的下开口的竖直下方。
69.第二位置“b”大体上是密封罐的盖的至少一部分移除的位置。
70.第三位置“c”大体上是罐(其使它的盖的至少一部分移除)的内容物暴露于供给系统100的外部的位置。在该位置“c”处,动物典型地可取用这些暴露的内容物。
71.第四位置“d”大体上是移除其盖的至少一部分并且暴露于供给系统100的外部一段时间的罐由封盖臂250至少部分地封盖的位置(下面进一步描述)。
72.第五位置“e”在已用罐筒134的下开口的竖直下方。
73.再次参照图5,如上面陈述的,支承臂180实现罐通过图7中示出的位置的移动。关于在密封罐筒132的下开口的竖直下方的第一位置“a”,密封罐释放并且变得由支承臂180支承。在释放罐之前,支承臂180可提升密封罐筒132内的全部数量的罐以测试重量,并从而确定密封罐筒132内剩余多少密封罐。支承臂180将包含重量测量装置以获得该数据,如下面论述的负载单元。备选地,密封罐筒132内或附近的传感器将提供该数据。支承臂180的更详细视图在图8a中示出,其中支承臂180在竖直位置,它将开始支承密封罐。
74.如可从图8a看到的,支承臂180包括升降臂182和支承垫184。升降臂182可操作地连接到升降螺杆185并且构造成围绕支承臂框架186内的枢轴枢转。升降螺杆185能够由升降马达(图5的升降马达187,其由罐滑槽支承件140支承)旋转。下面关于旋转(“顺时针”或“逆时针”作为示例)来论述升降螺杆的操作。在其它实施例中,可使用不同螺纹的升降螺杆185颠倒方向以实现支承臂180的相同移动。
75.升降螺杆185通过升降马达的顺时针旋转导致升降臂朝供给系统100的基部120竖直向下移动到图8b中示出的位置。升降马达可停止旋转,使升降臂182任何合适的高度,直到高度传感器189检测到臂突起179存在。
76.升降马达的升降螺杆185的逆时针旋转导致升降臂182竖直向上移动,远离供给系统100的基部120,到达图8a中示出的位置。升降马达可停止旋转,使升降臂182任何合适的高度,直到升降臂182停止,因为高度止挡部183到达升降螺杆185的顶部并由其停止。
77.支承垫184构造成支承密封罐和已用罐,并且包括电子重量感测装置,如负载单元。电子重量感测装置配置成发送和/或接收来自控制装置160的信号,其将在下面更详细地描述。根据从支承垫184接收到的信号,控制装置160可确定在罐盖的至少一部分移除的罐中剩余多少食物。
78.根据从支承垫184接收的信号,控制装置160还可通过将支承垫放置在任一筒下方并通过升降螺杆185向上竖直提升来支承任一筒中所有罐的全部重量,以确定密封罐筒132或已用罐筒134中的所有罐的重量。作为示例,根据从支承垫184接收到的信号,控制装置160可通过测量存在的所有罐的总重量且然后将该总重量除以预定的平均密封罐重量来确定密封罐筒132内有多少密封罐。
79.备选地,可在密封罐筒132和已用罐筒134中一者或两者的内部或附近包括传感器(未示出),以光学或机械地确定筒中罐的高度,因此确定每个筒中有多少罐。光学传感器可放置在密封罐筒132和/或已用罐筒134的内部、顶部处、底部处或周围,以确定筒中有多少罐。密封罐筒132和已用罐筒134可具有或可不具有切口,该切口将允许该类型的传感器工作(即使安装在筒的外部)。备选地,一个或多个机械传感器可放置在密封罐筒132和/或已用罐筒134内部,以检测筒中有多少罐。这些传感器可由罐或罐缺失所压入、提升、按压或以其它方式操纵,以确定每个筒的满度。
80.支承臂框架186通过合适的齿轮与旋转马达181相互作用,其导致支承臂框架186(包括支承臂180)在图7中示出的每个位置之间顺时针和逆时针旋转。
81.旋转马达181和升降马达187都是交流或直流的任何电动马达,它们的尺寸设置成引起支承臂框架186的旋转(一个或多个密封罐或已用罐支承在支承垫184上),并且尺寸适于竖直提升1、2、3、4、5、6、7、8、9、10、11、12、13、14、15个或更多个竖直堆叠在密封罐筒132和已用罐筒134内密封罐。
82.关于图7的第一位置“a”,其在密封罐筒132的下开口的竖直下方,密封罐释放并且变得由支承臂180支承。为在第一位置,旋转马达181使支承臂框架186和支承臂180旋转到密封罐筒132的下开口的竖直下方。为帮助从密封罐筒132控制密封罐,升降马达可使支承臂180竖直向上延伸至图8a中示出的位置。
83.在该位置,由于密封罐卡扣138移动,密封罐从密封罐筒132释放,并且允许密封罐掉落。密封件然后可落在支承垫184上。支承臂180(或供给系统100的另一合适部分,如在密封罐筒132内,或图7的位置“b”附近)可包括扫描仪(未示出)。该扫描仪可为任何合适的扫描仪,包括光学扫描仪和激光扫描仪,其能够解码存储在条形码、qr码或用于在罐上跟踪的目的的任何等效的可扫描/可检测编码选项中的数据。该数据可由控制装置160接收,并且将在下面更详细地描述。
84.可选地,支承臂180(或供给系统100的另一合适部分,如在密封罐筒132内,或图7的位置“b”附近)可包括第二扫描仪(未示出)。该第二扫描器可为任何合适的扫描器或装置(与控制装置160结合),其能够确定密封罐是否在正确的定向(正面向上,或罐的卷唇部和盖比罐的底部在竖直方向上更远离供给系统的基部120)。
85.备选地,在分配期间,支承垫184可从密封罐筒132底部处的开口抓住密封罐。在移动到位置“b”以打开罐之前,支承垫184将再次稍微升高并且罐将摩擦边缘检测器210,在图9中示出。边缘检测器210可位于位置“a”(包括位置“a”)与位置“b”之间的任何位置。
86.边缘检测器210包括片(blade)212,该片构造成当罐在箭头214的方向上移动时抓住罐的边沿。如果罐是倒置的,罐盖的唇部将卡在片212上并且边缘检测器210将通知控制装置160。当罐的边沿抓住片212时,该机构旋转,使得片突起215移动并由片突起传感器216检测到。如果罐正面向上,其中边沿在顶部处,片212将不卡住。如果罐正面向上,密封罐可继续到位置“b”。
87.如果边缘卡住,片突起传感器216将通知控制装置160,可使密封罐移动到位置“e”,并放入已用罐筒134中。然后可用一个新罐重新开始该过程。可通过控制装置160将此事件通知用户。在另一实施例中,装置开罐器190可构造成感测罐是否正面向上。这可根据由控制装置160接收的关于开罐器的片在罐上的抓握或没有抓握的反馈来确定。这也可由
控制装置160根据当开罐器190在罐上操作时由马达汲取的电流量来确定。下面进一步描述开罐器190的结构。
88.在位置“a”的支承臂180接收密封罐之后,并且在顺时针旋转升降螺杆185以将支承臂180放置在图8b中示出的位置之后,旋转马达181旋转并且导致支承臂180从图7的位置“a”逆时针旋转到位置“b”。在位置“b”处,升降螺杆185逆时针旋转并且支承臂180(以及其上的密封罐)朝开罐器190竖直提升。备选地,在位置“b”处,升降螺杆185不旋转并且开罐器190竖直向下移动。
89.如在图10a(其为开罐器190的下侧视图)中看到的,开罐器190包括供给齿轮192、切割器194和盖提取器199。供给齿轮192由开罐器马达(未示出)移动,该马达在顶部上或位于供给系统100内的任何位置,并构造成接触并导致罐逆向切割器194旋转,使得切割器194切穿罐的侧壁。在备选构造中,供给齿轮192可接触并导致罐逆向于切割器194旋转,使得切割器194切穿罐的上表面壁。在开罐器190的又一实施例中,挤压机构(未示出)可接触并挤压罐的翻盖柄部,并将上部翻盖从罐上剥离。供给齿轮192构造成通过向前和反转马达转动的方向而在箭头196的方向上移动通过供给齿轮凹槽198。如图10b中示出的,凸轮195的旋转(通过马达(未示出))使切割器194在图10a中的箭头196的方向上更多地移动。在上面实施例中的任何实施例下,开罐器190导致罐的基本上钝的上金属边缘以及盖移除。如本文所用,移除的盖是指通过开罐过程从密封罐移除的任何材料。
90.在密封罐通过任何合适的方法打开之后,移除的盖可由开罐器190保持直到支承臂180和现在打开的罐从图7的位置“b”移动之后。在那时,开罐器190可通过使用盖提取器199来释放移除的盖,其将有助于将盖从切割器194和/或供给齿轮192的抓握中推出,使得移除的盖竖直下落到稍后可由用户移除的容置部(未示出)中。备选地,开罐器190可保持移除的盖直到已开罐到达完成位置“c”之后,或在已开罐到达完成位置“d”之后,两者在下面更详细地描述。在该备选实施例中,旋转马达181旋转并使支承臂180从位置“c”或位置“d”顺时针旋转回到位置“b”,且然后释放移除的盖使得移除的盖竖直下落到现在使用过的罐上。
91.在密封罐在位置“b”打开之后,旋转马达181旋转并且导致支承臂180从图7的位置“b”逆时针旋转到位置“c”。在位置“c”处,升降螺杆185逆时针旋转并且支承臂180(以及在其上已开罐)朝供给开口200竖直提升。已开罐提升到供给开口200下方,通过供给开口200部分暴露,或在供给开口200下方偏移一段距离。在这时,动物可取用已开罐的内容物并吃至少一部分或全部内容物。备选地,罐可延伸到壳体110的外部以将食物呈现给动物,且然后一旦完成或按照调度的设置,缩回。
92.在可取用已开罐的内容物期间,支承垫184可在不同时间测量已开罐的重量,并将该信息传输到控制装置160,使得可将罐在打开时的重量与已开罐随着时间推移的重量比较。控制装置可使用这些重量测量来确定打开的罐中剩余材料的量,并且如果内容物移除得太快,可用于限制对打开的罐的取用。下面论述由控制装置160采取的进一步动作。
93.供给开口200可包括竖直向下延伸的唇部,其基本上覆盖打开的罐的暴露边缘。此外,供给开口200可包括倾斜部,其从供给开口200径向延伸并且朝供给开口200竖直向下倾斜。
94.可选地,当打开的罐不在位置“c”时,供给开口200可由开口覆盖物202覆盖,该开
口覆盖物在供给开口200上延伸。当打开的罐不在位置“c”时,开口覆盖物202可通过弹性元件的力保持在关闭构造(在图11中示出)。为移动开口覆盖物202,因此暴露供给开口200,而不是停在位置“c”,旋转马达181旋转并使支承臂180从位置“b”,通过位置“c”,在位置“d”之前逆时针旋转一段距离。在那时,支承臂180(及其上已开罐)通过升降螺杆185的逆时针旋转而竖直提升预定距离。然后,旋转马达181旋转并使支承臂180顺时针旋转回到位置“c”,使得支承臂180的一部分接触在开口覆盖物202的下表面上的开口覆盖物部分(在图11中示出)。旋转马达181继续顺时针旋转,使开口覆盖物202顺时针移动,露出供给开口200。
95.图11是从下侧视角的开口覆盖物202的一部分。从该视图中,接触支承臂180的开口覆盖物部分203可看作是从开口覆盖物202的表面延伸。在图11中(和图4a中)示出的构造中,开口覆盖物202在关闭位置,由开口覆盖物202与供给系统100的固定部分之间的弹性元件204(如弹簧或弹性体元件等)保持。一旦支承臂180接触开口覆盖物部分203,并迫使开口覆盖物202沿图11的逆时针方向旋转,供给开口200移动以与壳体开口300基本上对准,因此将罐暴露于壳体110外。一旦支承臂180移动到位置“d”,弹性元件204使开口覆盖物沿图11的逆时针方向旋转,使得供给开口200不再与壳体开口300基本上对准,并且开口覆盖物202它本身通过壳体开口300暴露,如在图4a中看到的。
96.在另一实施例中,开口覆盖物202可移动通过额外的马达(未示出)以暴露供给开口200。在另一实施例中,随着支承臂180通过支承臂180的一部分与开口覆盖物202的一部分之间的接触从位置“b”旋转到位置“c”,开口覆盖物202移动。
97.在上面实施例中的任何实施例下,一旦开口覆盖物202移动,在位置“c”处,升降螺杆185逆时针旋转并且支承臂180(和其上已开罐)朝供给开口200竖直提升。在其它实施例中,一旦在位置“c”,供给开口200就足够接近罐以允许在支承臂180不竖直向上或向下移动的情况下取用罐的内容物。
98.在预定的时间段或食用量之后,升降螺杆185顺时针旋转并且支承臂180(和在其上的已用罐)竖直向下并远离供给开口200移动。然后,旋转马达181旋转并使支承臂180从图7的位置“c”逆时针旋转到位置“d”或位置“e”中的一个。
99.如果旋转马达181旋转到位置“d”,升降螺杆185然后逆时针旋转并且支承臂180(和在其上的已用罐)朝封盖臂250竖直提升。在其它实施例中,支承臂180保持静止,而封盖臂250朝支承臂180移动。封盖臂250包括环252,其由基本上柔顺的材料制成,如弹性材料,其围绕封盖臂250的圆周延伸,其构造成在与已用罐的暴露边缘接触时可弹性变形。一旦环252与已用罐之间进行接触,已用罐的内容物与供给系统100周围的环境之间就形成基本上气密的密封。在另一实施例中,封盖臂250的圆周可比罐大并且可放置在罐上而不接触罐的任何部分。
100.可选地,封盖臂250还可包括一个或多个灯(在图12中示出),其能够至少部分地限制所用罐的内容物上的细菌和/或霉菌的生长。这些一个或多个灯的一个示例是紫外线(uv)灯和发光二极管(led)。该灯可在任何时间使用任何时间量并且可由用户编程。
101.图12中示出封盖臂250的侧截面视图。在图12中,已用罐c示为与环252的一部分接触。灯251在封盖臂250的下侧表面上并且朝已用罐c发射光。
102.在预定时间段之后,升降螺杆185然后顺时针旋转并且支承臂180(和在其上的已用罐)竖直提升远离封盖臂250。在这时,旋转马达181可逆时针旋转,回到位置“c”,或旋转
马达181可顺时针旋转到位置“e”。如果旋转马达181旋转回到位置“c”,已用罐可通过供给开口200再次暴露。该过程可持续多次,旋转马达181使已用罐从位置“c”移动到位置“d”,移动到位置“c”,移动到位置“d”等一段预定的时间或食用量或根据用户所做的调度设置。
103.在一段时间或食用量之后或根据用户进行的调度设置,使已用罐移动到位置“b”以拿起盖,且然后通过旋转马达181移动到位置“e”。位置“e”在已用罐筒134的下开口的竖直下方。在到达位置“e”时,升降螺杆185然后逆时针旋转并且支承臂180(和在其上的已用罐)朝已用罐筒134的底面竖直地提升。升降螺杆185将继续旋转,直到已用罐的下边缘通过已用罐卡扣144。在已用罐的下边缘通过已用罐卡扣144之后,已用罐然后由已用罐卡扣144支承。
104.如果在已用罐筒134中已经存在一个或多个已用罐,升降螺杆185使已用罐刚好带到位置“e”以竖直向上推动已经存在于筒中的一个或多个其它已用罐,直到刚带到位置“e”的已用罐的下边缘通过已用罐卡扣144。在刚好带到位置“e”的已用罐的下边缘通过已用罐卡扣144之后,已用罐筒134中的所有已用罐然后由已用罐卡扣144支承。
105.可选地,已用罐筒134的内表面可包括1、2、3、4、5个或更多个竖直轨道(未示出),其可由任何合适的材料(如塑料、金属、玻璃、陶瓷、橡胶、碳基材料及其组合)。这些竖直轨道可延伸已用罐筒134的竖直长度的一部分,或已用罐筒134的竖直长度的大部分或全部。这些竖直轨道可帮助防止已用罐的边缘卡住,或切入已用罐筒134它本身的一部分。
106.在另一实施例中,旋转马达181'可位于图4b中示出的位置,通过马达齿轮191的旋转,通过与马达齿轮191和转盘193的外部圆周上的齿的相互作用,使整个转盘193旋转。在该实施例中,支承臂180可附接到转盘193并且支承臂180可与转盘193一起旋转到上面论述的位置。
107.该备选实施例在图8c中示出,其包括转盘193和支承臂180,其与供给系统100的其它构件分开。在该实施例中,升降臂182如第一实施例中那样竖直向上和向下移动。
108.如本文所用,用语控制装置160是指在电路板中、电路板上或附接到电路板的所有构件。控制装置160的一些构件可在图5中示出的位置,且/或控制装置的一些构件可位于控制装置160'上,还在图5中示出。在示例实施例中,控制装置160可包括处理器、存储器、网络接口和/或图像传感器(例如,相机)中的一种或多种。网络接口可发送和接收各种信号,如wifi信号、bluetooth
®
信号等。控制装置160可配置成从供给系统100的构件或从供给系统100外部的其它装置接收各种输入。此外,由控制装置160接收或从控制装置产生的每个动作可在控制装置160上本地处理,和/或传输到外部服务器,如云数据库,以进行处理。
109.在一个示例中,控制装置160可从供给系统100外部的移动电话接收输入,其中这些接收到的输入可由控制装置160的处理器处理以控制供给系统100的构件的操作。
110.控制装置160构造成从支承垫184上的电子重量感测装置接收信号。控制装置160可向电子重量感应装置发送信号进行测量,且然后控制装置160可随时接收电子重量感应装置的输出信号,如当支承臂180在位置“a”、“b”、“c”、“d”和“e”中的任何位置处或在这些位置之间时。控制装置160可使用这些接收到的信号来确定随着时间的推移移除(由动物吃)的每个罐的内容物的量。控制装置160也可使用这些信号来确定重量上是否有增加,其可指示外物放入已用罐中,或动物是否在已用罐中反刍。如果控制装置160确实做出该确定,可通过接口发送已检测到故障的警报。如果检测到故障,控制装置160可停止供给系统
100内所有元件的所有移动(以允许用户手动移除已用罐)或自动将已用罐移动到已用罐筒134中,且然后从密封罐筒132中取出密封罐。
111.在其它实施例中,控制装置160可确定当已用罐的剩余重量低于阈值时,控制装置160可自动地将已用罐移动到已用罐筒134中。
112.此外,控制装置160可向电子重量感测装置发送信号以进行测量,且然后控制装置160可接收来自电子重量感测装置的输出信号以确定密封罐筒132中的所有初始(或剩余)密封罐的重量。控制装置160可使用这些接收到的信号来确定密封罐筒132中的密封罐的数量(如果有)。控制装置160可配置成当检测到的密封罐的数量低于阈值时通过接口发送警报,例如剩余0个密封罐、剩余1个密封罐、剩余2个密封罐等。控制装置160可每次从密封罐筒132分配罐时进行检查,以便用户可知道密封罐筒132中的密封罐的当前数量。
113.所有此类重量感测信号可由控制装置存储,且然后随后通过网络接口传输以存储在另一位置,如但不限于云或本地或外部数据库。
114.控制装置160还可从升降马达187和旋转马达181中的每个接收旋转数据,以确定支承臂180的竖直高度和旋转定向。
115.控制装置160还向升降马达187和旋转马达181中的每个传送旋转数据,使这些马达根据存储的规则移动支承臂。
116.在一个示例中,控制装置160可配置成一旦由接近传感器或由控制装置160的相机检测到运动,就操作支承臂180以及如上面论述的可选地开口覆盖物202,以通过供给开口200暴露已开罐的内容物一段时间。相机可用作接近传感器或用于识别不同的宠物。接近传感器还可为来自动物身上装置的信号的接收器,如动物项圈上的rfid芯片或动物体内的微芯片。
117.在另一示例实施例中,控制装置160可配置成使用从相机(控制装置160的相机)接收的图像来运行机器学习模型。机器学习模型可存储在控制装置160的存储器中,并且可为能够区分接近供给系统100的不同动物的分类模型。在另一实施例中,识别过程可从控制装置160传输到云网络和/或外部服务器进行识别处理,并且从该过程获得的数据可存储在云网络和/或外部服务器上,和/或传输回到控制装置160。
118.控制装置160的存储器可存储不同动物到不同动作过程的映射以操作供给系统1。控制装置160可运行机器学习模型以识别当前接近供给系统1的动物(如通过物理尺寸、形状、颜色和/或物理外观,如毛皮/眼睛颜色和/或毛皮图案),并且在存储器中识别映射到已识别动物的一系列动作。例如,如果动物aa映射到三分钟的允许进食时间的动作,响应于识别动物aa,控制装置160可操作支承臂180以及如上面论述的可选的开口覆盖物202,以通过供给开口200暴露已开罐的内容物达三分钟。
119.本公开内容的所描述的实施例和示例意在为说明性的而不为限制性的,且不意在代表本公开内容的每个实施例或示例。虽然示出、描述和指出应用于其各种特定实施例的本公开内容的基本新颖特征,还将理解,可由本领域技术人员进行所示装置的形式和细节以及它们的操作中的各种省略、替换和改变,而不脱离本公开内容的精神。例如,明确地意在以基本上相同的方式执行基本上相同的功能来实现相同结果的那些元件和/或方法步骤的所有组合都在本公开内容的范围内。此外,应认识到,结合本公开内容的任何公开的形式或实施例示出和/或描述的结构和/或元件和/或方法步骤可并入任何其它公开或描述或提
出的形式或实施例来作为设计选择的总体主题。此外,在不字面地和法律上认为等同于背离以下权利要求书中所阐述的本公开内容的精神或范围的情况下,可进行各种修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。