1.本实用新型属于机器人技术领域,具体涉及一种带有多机械臂的智能回转机构。
背景技术:
2.随着智能技术的不断发展,越来越多的产品变得更加智能化,这也促进了不同领域的产品跨领域结合的现象,其中比较普遍的是搭载机械臂的智能机器人。现有机器人只安装一条机械臂,效率低下、功能单一、工作形式单一等问题。
技术实现要素:
3.为了克服背景技术中现有机器人只安装一条机械臂,效率低下、功能单一、工作形式单一等的问题,本实用新型提供一种带有多机械臂的智能回转机构,一个回转基座上安装了三条机械臂,机械臂组可进行整体回转。两两机械臂之间可以进行协同工作,完成单一机械臂无法完成的动作;该实用新型在正确安装后可灵活智能地应用于车间、仓库等场合,与人工和普通单机械臂相比,大大提高工作效率,减少人工成本,减少用工风险。
4.为实现上述目的,本实用新型是通过如下技术方案实现的:一种带有多机械臂的智能回转机构主要包括回转基座、机械臂,所述的回转基座包括底板、转盘、步进电机、步进电机连接支架,所述的步进电机连接支架安装在底板底部,步进电机安装在步进电机连接支架底部,转盘通过转轴及轴承安装在底板中部,步进电机与转轴驱动连接;所述的机械臂设有2至4个,沿圆周方向均匀安装在转盘上。
5.所述的底板底部分别通过半轴安装有四个移动轮,分别通过四个驱动电机驱动,驱动电机固定安装在底板底部。
6.所述的驱动电机底部设有防护板,所述的防护板通过连杆安装在底板底部。
7.所述的步进电机与转轴通过齿轮传动。
8.本实用新型的有益效果:
9.本实用新型一个回转基座上安装了三条机械臂,机械臂组可进行整体回转。两两机械臂之间可以进行协同工作,完成单一机械臂无法完成的动作;该实用新型在正确安装后可灵活智能地应用于车间、仓库等场合,与人工和普通单机械臂相比,大大提高工作效率,减少人工成本,减少用工风险;解决线束的缠绕打结的情况。
附图说明
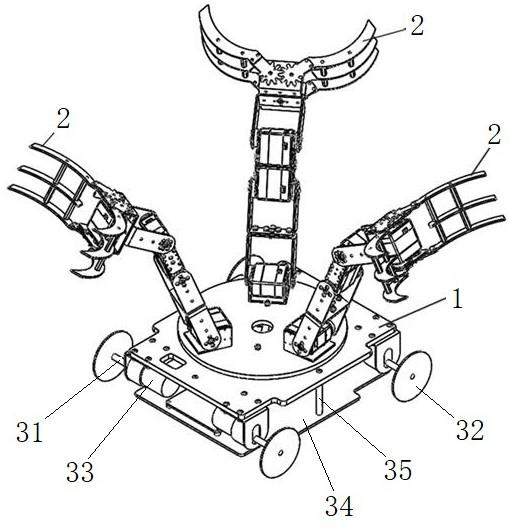
10.图1是本实用新型立体示意图。
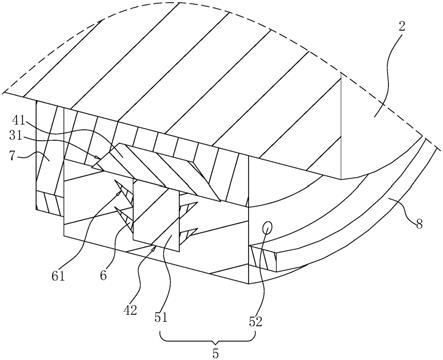
11.图2是本实用新型回转基座俯轴测立体示意图。
12.图3是本实用新型回转基座仰轴测立体示意图。
具体实施方式
13.为了使本实用新型的目的、技术方案和有益效果更加清楚,下面将结合附图,对本
实用新型的优选实施例进行详细的说明,以方便技术人员理解。
14.本实用新型公开了一种带有多机械臂的智能回转机构,所述的一种带有多机械臂的智能回转机构主要包括回转基座1、机械臂2,所述的回转基座1包括底板3、转盘4、步进电机5、步进电机连接支架6,所述的步进电机连接支架6安装在底板3底部,步进电机5安装在步进电机连接支架6底部,转盘4通过转轴及轴承安装在底板3中部,步进电机5与转轴驱动连接;所述的机械臂2设有2至4个,沿圆周方向均匀安装在转盘4上;本实用新型一个回转基座上安装了三条机械臂,机械臂组可进行整体回转。两两机械臂之间可以进行协同工作,完成单一机械臂无法完成的动作;该实用新型在正确安装后可灵活智能地应用于车间、仓库等场合,与人工和普通单机械臂相比,大大提高工作效率,减少人工成本,减少用工风险;解决线束的缠绕打结的情况。
15.所述的底板3底部分别通过半轴31安装有四个移动轮32,分别通过四个驱动电机33驱动,驱动电机33固定安装在底板3底部;通过分别控制驱动电机33的转速实现移动轮32差速,转向、移动方便。
16.所述的驱动电机33底部设有防护板34,所述的防护板34通过连杆35安装在底板3底部,防止驱动电机33和步进电机5受到撞击,起到保护设备的作用。
17.所述的步进电机5与转轴通过齿轮传动。
18.最后说明的是,以上优选实施例仅用以说明本实用新型的技术方案而非限制,尽管通过上述优选实施例已经对本实用新型进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本实用新型权利要求书所限定的范围。
技术特征:
1.一种带有多机械臂的智能回转机构,其特征在于:所述的带有多机械臂的智能回转机构包括回转基座(1)、机械臂(2),所述的回转基座(1)包括底板(3)、转盘(4)、步进电机(5)、步进电机连接支架(6),所述的步进电机连接支架(6)安装在底板(3)底部,步进电机(5)安装在步进电机连接支架(6)底部,转盘(4)通过转轴及轴承安装在底板(3)中部,步进电机(5)与转轴驱动连接;所述的机械臂(2)设有2至4个,沿圆周方向均匀安装在转盘(4)上。2.如权利要求1所述的一种带有多机械臂的智能回转机构,其特征在于:所述的底板(3)底部分别通过半轴(31)安装有四个移动轮(32),分别通过四个驱动电机(33)驱动,驱动电机(33)固定安装在底板(3)底部。3.如权利要求2所述的一种带有多机械臂的智能回转机构,其特征在于:所述的驱动电机(33)底部设有防护板(34),所述的防护板(34)通过连杆(35)安装在底板(3)底部。4.如权利要求1、2、3任意一条所述的一种带有多机械臂的智能回转机构,其特征在于:所述的步进电机(5)与转轴通过齿轮传动。
技术总结
本实用新型涉及一种带有多机械臂的智能回转机构,属于机器人技术领域。主要包括回转基座、机械臂,所述的回转基座包括底板、转盘、步进电机、步进电机连接支架,所述的步进电机连接支架安装在底板底部,步进电机安装在步进电机连接支架底部,转盘通过转轴及轴承安装在底板中部,步进电机与转轴驱动连接;所述的机械臂设有2至4个,沿圆周方向均匀安装在转盘上;本实用新型一个回转基座上安装了三条机械臂,机械臂组可进行整体回转。两两机械臂之间可以进行协同工作,完成单一机械臂无法完成的动作;该实用新型在正确安装后可灵活智能地应用于车间、仓库等场合,与人工和普通单机械臂相比,大大提高工作效率,减少人工成本,减少用工风险。工风险。工风险。
技术研发人员:王灏炜 朱海龙 段鉴哲
受保护的技术使用者:昆明理工大学
技术研发日:2021.05.20
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。