1.本实用新型涉及一种人体膝关节助力外骨骼装置,属于机械领域。
背景技术:
2.膝关节承受全身重量,极易受到损伤。随着年纪的增加,人们经常在日常走路或者上楼梯时膝盖发出阵阵的疼痛感,或者在蹲下起身时发现膝盖会发出声响并伴随着剧烈的疼痛。这些种种迹象都代表膝关节可能已经处在退化的状态。
3.针对老年人和其他膝关节受损的人员,为了减少他们膝关节处的受力和疼痛感,研究了一套人体膝关节助力外骨骼装置,穿戴在使用者的膝关节附近的大小腿外部,可以为使用者提供助力、保护等功能。
技术实现要素:
4.为了克服上述不足,本实用新型提供一种人体膝关节助力外骨骼装置。
5.本实用新型提供的一种人体膝关节助力外骨骼装置,包括减速电机,减速电机上部与大腿连杆连接,下部与小腿连杆连接,由减速电机驱动可相对转动的小腿连杆和大腿连杆,所述大腿连杆通过绑带绑在橡胶垫上,小腿连杆通过绑带绑在橡胶垫上,橡胶垫分别固定在人体大腿和小腿上;在小腿外侧设有速度传感器和压力传感器。
6.进一步地,所述橡胶垫是由三块橡胶材料制成的垫片围成的环形结构,由绑带和连接环将三块垫片固定在腿部,橡胶垫通过连接环分别与小腿连杆、大腿连杆连接。进一步地,在大腿部位,橡胶垫的顶部是由第一绑带和连接环固定,底部是由第二绑带固定,连接环是跟大腿连杆连接固定,第一绑带系在连接环的两端,连接环跟大腿连杆焊接,第一绑带比第二绑带短;小腿橡胶垫的底部是由第一绑带和连接环固定,顶部是由第二绑带固定,连接环是跟小腿连杆焊接。
7.进一步地,所述减速电机固定在大腿连杆和小腿连杆之间;减速电机与单片机连接,以控制大腿连杆和小腿连杆带动腿部运动,当小腿摆动时,减速电机接收到来自单片机的信号后开始转动,电机轴带动小腿连杆相对大腿连杆转动。
8.进一步地,传感器与单片机之间通过数据线连接,传感器信号先由数据线传给单片机,然后单片机对信号作进一步地处理加工,最后再由数据线传给减速电机,以控制大腿连杆和小腿连杆带动腿部运动。
9.在小腿连杆和小腿之间设置有第一压力传感器,在第一绑带和小腿之间固定设有第二压力传感器,第一压力传感器固定后位于小腿前面,第二压力传感器固定后位于小腿后面;速度传感器设置在小腿橡胶垫上,位于第一压力传感器的上面。
10.左、右腿的膝关节助力外骨骼装置的安装方法一样。脱下膝关节助力外骨骼装置时,将第一绑带和第二绑带解开即可。
11.本实用新型的有益效果:
12.本实用新型提供的膝关节助力外骨骼机器人,穿戴在使用者的膝关节附近的大小
腿外部,可以为使用者提供助力、保护等功能。
13.下面结合附图和实施例对本实用新型做进一步说明。
附图说明
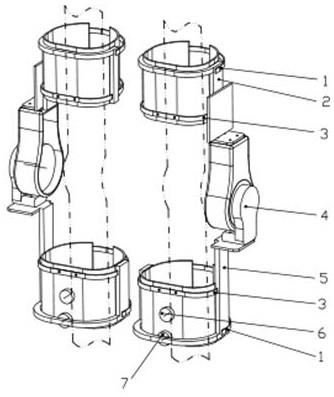
14.图1为本实用新型的结构示意图。
15.图2为图1的后视图。
16.图3为本实用新型的控制原理图。
17.图中:1为第一绑带,2为大腿连杆,3为第二绑带,4为减速电机,5为小腿连杆,6为速度传感器,7为第一压力传感器,8为橡胶垫,9为第二压力传感器,10为大腿,11为小腿,12为单片机。
具体实施方式
18.实施例:
19.如图1~3所示,一种人体膝关节助力外骨骼装置,包括减速电机4,减速电机4上部与大腿连杆2连接,下部与小腿连杆5连接,由减速电机4驱动可相对转动的小腿连杆5和大腿连杆2,所述大腿连杆2通过绑带绑在橡胶垫8上,小腿连杆5通过绑带绑在橡胶垫上,橡胶垫8分别固定在人体大腿10和小腿11上;在小腿11外侧设有速度传感器6和压力传感器。
20.进一步地,所述橡胶垫8是由三块橡胶材料制成的垫片围成的环形结构,由绑带和连接环将三块垫片固定在腿部,橡胶垫8通过连接环分别与小腿连杆5、大腿连杆2连接。进一步地,在大腿10部位,橡胶垫8的顶部是由第一绑带1和连接环固定,底部是由第二绑带3固定,连接环是跟大腿连杆2连接固定,第一绑带1系在连接环的两端,连接环跟大腿连杆2焊接,第一绑带1比第二绑带3短;小腿橡胶垫8的底部是由第一绑带1和连接环固定,顶部是由第二绑带3固定,连接环是跟小腿连杆5焊接。
21.进一步地,所述减速电机4固定在大腿连杆2和小腿连杆5之间;减速电机4与单片机12连接,大腿连杆2和减速电机4均和大腿10固定,以控制大腿连杆2和小腿连杆5带动腿部运动,当小腿摆动时,减速电机接收到来自单片机的信号后开始转动,电机轴带动小腿连杆相对大腿连杆转动。
22.进一步地,传感器与单片机12之间通过数据线连接,传感器信号先由数据线传给单片机,然后单片机对信号作进一步地处理加工,最后再由数据线传给减速电机,以控制大腿连杆和小腿连杆带动腿部运动。
23.在小腿连杆5和小腿11之间设置有第一压力传感器7,在第一绑带1和小腿11之间固定设有第二压力传感器9,第一压力传感器7固定后位于小腿11前面,第二压力传感器9固定后位于小腿11后面;速度传感器设置在小腿橡胶垫8上,位于第一压力传感器的上面。
24.左、右腿的膝关节助力外骨骼装置的安装方法一样。脱下膝关节助力外骨骼装置时,将第一绑带1和第二绑带3解开即可。
25.本实用新型的驱动原理:
26.使用者通过第一绑带1和第二绑带3将人体膝关节助力外骨骼装置与使用者的大腿10和小腿11连接固定,当使用者的小腿11相对于大腿10向前摆动时,固定在橡胶垫8上的速度传感器6检测到小腿11运动的速度为正值,然后将这个信号值传递给单片机12,如图3
所示,再由单片机12控制减速电机4驱动可相对大腿连杆2转动的小腿连杆5也向前摆动,使第一压力传感器7受到的压力恒为20n,从而给使用者膝关节伸展提供助力。
27.当使用者的小腿11相对与大腿10向后摆动时,固定在橡胶垫8上的速度传感器6检测到小腿11运动的速度为负值,然后将这个信号传递给单片机12,如图3所示,再由单片机12控制减速电机4驱动可相对大腿连杆2转动的小腿连杆5也向后摆动,使第二压力传感器9受到的压力恒为20n,从而给使用者膝关节弯曲时提供助力。
28.当使用者停止运动时,固定在橡胶垫8上的速度传感器6检测到小腿11运动的速度为0,单片机12则控制减速电机4停止运动。
技术特征:
1.一种人体膝关节助力外骨骼装置,其特征在于:包括减速电机,减速电机上部与大腿连杆连接,下部与小腿连杆连接,由减速电机驱动可相对转动的小腿连杆和大腿连杆,所述大腿连杆通过绑带绑在橡胶垫上,小腿连杆通过绑带绑在橡胶垫上,橡胶垫分别固定在人体大腿和小腿上;在小腿外侧设有速度传感器和压力传感器。2.根据权利要求1所述的人体膝关节助力外骨骼装置,其特征在于:所述橡胶垫是由三块橡胶材料制成的垫片围成的环形结构,由绑带和连接环将三块垫片固定在腿部,橡胶垫通过连接环分别与小腿连杆、大腿连杆连接。3.根据权利要求2所述的人体膝关节助力外骨骼装置,其特征在于:在大腿部位,橡胶垫的顶部是由第一绑带和连接环固定,底部是由第二绑带固定,连接环是跟大腿连杆连接固定,第一绑带系在连接环的两端,连接环跟大腿连杆焊接,第一绑带比第二绑带短;小腿橡胶垫的底部是由第一绑带和连接环固定,顶部是由第二绑带固定,连接环是跟小腿连杆焊接。4.根据权利要求1所述的人体膝关节助力外骨骼装置,其特征在于:所述减速电机固定在大腿连杆和小腿连杆之间;减速电机与单片机连接,当小腿摆动时,减速电机接收到来自单片机的信号后开始转动,电机轴带动小腿连杆相对大腿连杆转动。5.根据权利要求1所述的人体膝关节助力外骨骼装置,其特征在于:传感器与单片机之间通过数据线连接,传感器信号先由数据线传给单片机,然后单片机对信号作进一步地处理加工,最后再由数据线传给减速电机,以控制大腿连杆和小腿连杆带动腿部运动。6.根据权利要求1所述的人体膝关节助力外骨骼装置,其特征在于:在小腿连杆和小腿之间设置有第一压力传感器,在第一绑带和小腿之间固定设有第二压力传感器,第一压力传感器固定后位于小腿前面,第二压力传感器固定后位于小腿后面;速度传感器设置在小腿橡胶垫上,位于第一压力传感器的上面。
技术总结
本实用新型公开一种人体膝关节助力外骨骼装置,包括减速电机,减速电机上部与大腿连杆连接,下部与小腿连杆连接,由减速电机驱动可相对转动的小腿连杆和大腿连杆,所述大腿连杆通过绑带绑在橡胶垫上,小腿连杆通过绑带绑在橡胶垫上,橡胶垫分别固定在人体大腿和小腿上;在小腿外侧设有速度传感器和压力传感器。本实用新型提供的膝关节助力外骨骼机器人,穿戴在使用者的膝关节附近的大小腿外部,可以为使用者提供助力、保护等功能。保护等功能。保护等功能。
技术研发人员:畅辉 宋善超 梁义维
受保护的技术使用者:太原理工大学
技术研发日:2021.05.20
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。