1.本实用新型属于电梯安全领域,具体地说是一种曳引式电梯故障自救脱困装置。
背景技术:
2.曳引式电梯是当前实装数量最多、应用最为广泛的一种电梯。当曳引式电梯因外部电源中断或自身质量问题而出现停梯故障时,轿厢内的乘客事实上处于被困状态。出现这种情况时,乘客只能被动地等待专业人员从外部救援。长时间处于相对狭小的轿厢空间会对乘客身心健康造成不良影响,更有个别乘客可能采取“扒门”等错误行为盲目自救,造成设备损坏,甚至导致人身伤害事故的发生。
3.目前,市面上已有的自救装置的主要问题在于只能在特定工况下起作用,并不能覆盖电梯运行的全部工况(例如被困乘客重量与电梯配重重量在视为相等的范围内)。在实际应用中经常出现偏离了特定工况就无法实现自救脱困的现象。
技术实现要素:
4.为了解决曳引式电梯因出现停梯故障而导致乘客出现上述问题,实现全部工况的自救,本实用新型的目的在于提供一种曳引式电梯故障自救脱困装置。该曳引式电梯故障自救脱困装置在曳引式电梯控制系统发生故障、电梯乘坐人员被困于轿厢内时,可以实现电梯内乘坐人员自救并安全脱困。
5.本实用新型的目的是通过以下技术方案来实现的:
6.本实用新型包括平层感应传感器、离合装置、拖动装置、控制系统、称重装置及壳体,其中壳体安装于电梯曳引机主轴端轮一侧,所述壳体上分别安装有离合装置、拖动装置及控制系统,所述平层感应传感器及称重装置分别安装于轿厢上,该轿厢内设有控制按钮,所述平层感应传感器、控制按钮、称重装置及电梯的门机均通过随行电缆与控制系统相连,所述控制系统通过电缆与电梯的抱闸连接;所述离合装置中的动力源及拖动装置中的动力源分别与控制系统相连,该拖动装置与所述离合装置中的动力源输出端连接,所述拖动装置中的执行部件通过离合装置中的动力源驱动与电梯的主轴端轮抵接或分离,并在与所述主轴端轮抵接时通过所述拖动装置中的动力源驱动带动所述主轴端轮正转或反转,进而带动轿厢升降。
7.其中:所述离合装置中的动力源为电动推杆,该电动推杆安装于所述壳体上,输出端与所述拖动装置相连。
8.所述离合装置还包括导向机构,该导向机构包括上下设置的两组导向板,每组导向板均为两个,每组两个所述导向板的相对侧均开设有导向滑槽,所述拖动装置在移动过程中通过该导向滑槽实现导向。
9.所述拖动装置中的动力源为减速电机,所述拖动装置中的执行部件为驱动轮,所述减速电机的输出端连接有驱动轮,该减速电机及所述驱动轮通过所述离合装置中的动力源驱动移动。
10.所述拖动装置还包括电机安装架,该电机安装架连接于所述离合装置中的动力源输出端,所述减速电机固定在电机安装架上,所述驱动轮朝向主轴端轮的一侧由电机安装架露出。
11.所述控制系统包括不间断电源ups、plc、开关电源t1、开关电源t2、延时继电器sjj、交流接触器bzj、电磁继电器j1及电磁继电器j2,所述离合装置中的动力源为电动推杆,所述拖动装置中的动力源为减速电机;所述不间断电源ups通过供电电缆分别为开关电源t1、开关电源t2、延时继电器sjj、交流接触器bzj供电,所述开关电源t1为电梯的抱闸供电,所述开关电源t2分别为plc、电磁继电器j1、电磁继电器j2、电动推杆及减速电机供电。
12.所述plc分别与平层感应传感器、称重装置、控制按钮连接,所述plc的第一、第二、第三、第四输出端分别与电磁继电器j1的第一常闭触点连接、电磁继电器j1的线圈、电磁继电器j2的线圈、交流接触器bzj的线圈连接;所述电磁继电器j1的第一常闭触点与门机连接;
13.所述不间断电源ups分别与开关电源t1的输入端、开关电源t2的输入端连接;
14.所述开关电源t1的两个输入端之间连有延时继电器sjj的线圈,所述不间断电源ups与开关电源t1的输入端之间连有电磁继电器j1的第一常开触点;所述开关电源t1的正、负输出端之间串联有交流接触器bzj的第一常开触点、延时继电器sjj的常闭触点、二极管、抱闸线圈;
15.所述开关电源t2的正、负输出端之间并联有电动推杆电路、减速电机电路和称重装置电路;
16.所述电动推杆电路包括依次串联的电磁继电器j1的第二常闭触点、离合装置中的电动推杆供电输入端、电磁继电器j1的第三常闭触点;
17.所述减速电机电路包括依次串联的交流接触器bzj的第二常开触点、电磁继电器j2的第一常闭触点、减速电机供电输入端、电磁继电器j2的第二常闭触点;
18.所述称重装置电路为称重装置电源输入端。
19.本实用新型的优点与积极效果为:
20.1.本实用新型具有结构紧凑、安全可靠、制造和维护成本低、适配范围广、能够不依赖于电梯控制系统而独立工作的特点,并且可以实现对电梯运行工况的全覆盖,适合各种规格型号的曳引式电梯选型采用。
21.2.本实用新型使得被困于轿厢的电梯乘坐人员在观察简明的指示说明后便能掌握该曳引式电梯故障的自救脱困,使被困于轿厢的电梯乘坐人员能够通过自救及时脱困,从而使乘坐电梯变得更为安全。
附图说明
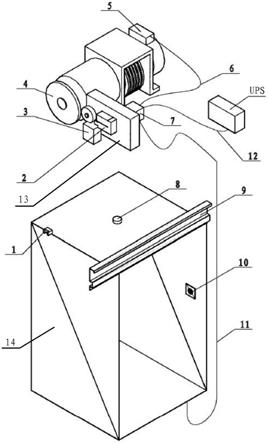
22.图1为本实用新型的整体结构示意图;
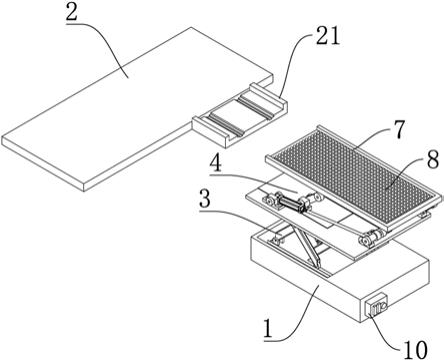
23.图2为本实用新型中离合装置、拖动装置及壳体的立体结构示意图;
24.其中:1为平层感应传感器,2为离合装置,201为电动推杆,202为导向机构,2021为导向板,2022为导向滑槽,3为拖动装置,301为减速电机,302为电机安装架,303为驱动轮,4为主轴端轮,5为抱闸,6为电缆,7为控制系统,8为称重装置,9为门机,10为控制按钮,11为随行电缆,12为供电电缆,13为壳体,14为轿厢;
25.图3为本实用新型的电路图之一;
26.图4为本实用新型的电路图之二;
27.图5为本实用新型的电路图之三。
具体实施方式
28.下面结合附图对本实用新型作进一步详述。
29.如图1、图2所示,本实用新型包括平层感应传感器1、离合装置2、拖动装置3、控制系统7、称重装置8及壳体13,其中壳体13安装于电梯曳引机主轴端轮4一侧,壳体13上分别安装有离合装置2、拖动装置3及控制系统7,平层感应传感器1及称重装置8分别安装于电梯的轿厢14上,该轿厢14内设有控制按钮10,平层感应传感器1、控制按钮10、称重装置8及电梯的门机9均通过随行电缆11与控制系统7相连,控制系统7通过电缆6与电梯的抱闸5连接;本实施例的称重装置8为称重传感器,本实施例的控制按钮10外具有防误触设计的保护罩。离合装置2中的动力源及拖动装置3中的动力源分别与控制系统7相连,该拖动装置3与离合装置2中的动力源输出端连接,拖动装置3中的执行部件通过离合装置2中的动力源驱动与电梯的主轴端轮4抵接或分离,并在与主轴端轮4抵接时通过拖动装置3中的动力源驱动带动主轴端轮4正转或反转,进而带动轿厢14升降。
30.本实施例的离合装置2中的动力源为电动推杆201,该电动推杆201固定在壳体13上,输出端与拖动装置3相连。本实施例的离合装置2还包括导向机构202,该导向机构202包括上下设置的两组导向板2021,每组导向板2021均为两个,每组两个导向板2021的相对侧均开设有导向滑槽2022,拖动装置3在移动过程中通过该导向滑槽2022实现导向。
31.本实施例的拖动装置3中的动力源为减速电机301,拖动装置3中的执行部件为驱动轮303,拖动装置3还包括电机安装架302;电机安装架302与电动推杆201的输出端相连,电机安装架302的上下两侧分别容置于上下两组导向板2021之间的导向滑槽2022中,电机安装架302在电动推杆201的驱动下沿导向滑槽2022移动;减速电机301固定在电机安装架302上,减速电机301的输出端连接有驱动轮303,该减速电机301及驱动轮303随电机安装架302一起通过电动推杆201驱动移动。驱动轮303朝向主轴端轮4的一侧由电机安装架302露出,进而与主轴端轮4抵接。
32.如图3~5所示,本实施例的控制系统7用以控制抱闸5执行松闸、合闸动作,同时控制离合装置2的接合、分离,并控制拖动装置3的启动、停止,以及门机9的开闭动作;控制系统7包括不间断电源ups、plc、开关电源t1、开关电源t2、延时继电器sjj、交流接触器bzj、电磁继电器j1及电磁继电器j2,不间断电源ups通过供电电缆12分别为开关电源t1、开关电源t2、延时继电器sjj、交流接触器bzj供电,开关电源t1为电梯的抱闸5供电,开关电源t2分别为plc、电磁继电器j1、电磁继电器j2、电动推杆201及减速电机301供电。本实施例的不间断电源ups为充电电源。
33.plc分别与平层感应传感器1、称重装置8、控制按钮10连接,plc的第一、第二、第三、第四输出端分别与电磁继电器j1的第一常闭触点连接、电磁继电器j1的线圈、电磁继电器j2的线圈、交流接触器bzj的线圈连接;电磁继电器j1的第一常闭触点与门机连接;
34.不间断电源ups分别与开关电源t1的输入端、开关电源t2的输入端连接;
35.开关电源t1的两个输入端之间连有延时继电器sjj的线圈,不间断电源ups与开关
电源t1的输入端之间连有电磁继电器j1的第一常开触点;开关电源t1的正、负输出端之间串联有交流接触器bzj的第一常开触点、延时继电器sjj的常闭触点、二极管、抱闸线圈;
36.开关电源t2的正、负输出端之间并联有电动推杆电路、减速电机电路和称重装置电路;
37.电动推杆电路包括依次串联的电磁继电器j1的第二常闭触点、电动推杆201供电输入端、电磁继电器j1的第三常闭触点;
38.减速电机电路包括依次串联的交流接触器bzj的第二常开触点、电磁继电器j2的第一常闭触点、减速电机供电输入端、电磁继电器j2的第二常闭触点;
39.称重装置电路为称重装置8电源输入端。
40.本实用新型的脱困方法为:
41.在轿厢14内的被困人员打开保护罩、按动控制按钮10,控制系统7控制抱闸5松闸、控制电动推杆201推动拖动装置3进而使驱动轮303与主轴端轮4抵接、控制减速电机301驱动驱动轮303带动主轴端轮4正转或反转,进而带动轿厢14升降运行;主轴端轮4的正转或反转通过称重装置8测得的轿厢14内被困人员重量与电梯配重的重量决定,当控制系统7接收到称重装置8测得的被困人员重量大于电梯配重时,控制驱动轮303带动主轴端轮4反转,使轿厢14下降;当控制系统7接收到称重装置8测得的被困人员重量小于电梯配重时,控制驱动轮303带动主轴端轮4正转,使轿厢14上升;当轿厢14运行到平层位置时,控制系统7接收到平层感应传感器1输出的平层信号后,控制抱闸5合闸、控制电动推杆201拉动拖动装置3进而使驱动轮303与主轴端轮4分离、控制减速电机301停止工作,轿厢14停止运行,控制系统7控制门机9做开门动作,实现被困人员自救脱困。轿厢14内的被困人员可采用点按方式按动控制按钮10,每按一次控制按钮10,使轿厢14运行、停止,多次按动直至控制系统7接收到平层感应传感器1输出的平层信号,轿厢14运行到达平层位置,控制系统7控制抱闸5合闸。
42.本实施例的plc电气原理图、开关电源t1电气原理图、开关电源t2电气原理图分别如图3、图4、图5所示,图3中fx2n为plc,fm为蜂鸣器,upsn、upsl分别表示不间断电源火线和零线,zq1和zq2表示引线,103~109、111、201~203等三位数字用于表示接线处,其中104、103分别接入t2输出的24v正负电源,x0~x5表示输入点,y0~y3分别表示plc输出触点,通过com与外部设备连接,例如j1、j2、bzj;图5中,左侧j1的1、5、9引脚分别常闭触点、常开触点和公共端,右侧j1的2、6、10引脚分别常闭触点、常开触点和公共端;左侧j2的2、4、6引脚分别常闭触点、常开触点和公共端,右侧j2的1、3、5引脚分别常闭触点、常开触点和公共端;dct表示电动推杆,dcd表示减速电机,zzj表示载重装置。本实施例的工作原理具体为:
43.当电梯轻载时,即称重装置8测得的被困人员重量小于电梯配重时,控制按钮10的信号反馈至plc,称重装置8无信号输入给plc,使电磁继电器j1第一常闭触点、第二常闭触点、第三常闭触点均断开、第一常开触点吸合,使交流接触器19第一常开触点、第二常开触点均吸合,延时继电器sjj线圈得电开始计时,开关电源t2的24v电压输出给电动推杆201及减速电机301,开关电源t1的110v电压输出给抱闸线圈,在指定时间内抱闸5打开,减速电机301开始正向驱动,当超出指定时间,延时继电器sjj常闭触点断开,实现自动切断抱闸110v;当平层感应传感器1的信号传入plc,使电磁继电器j1线圈与交流接触器bzj线圈失电,使减速电机301停止旋转,抱闸线圈断电,电动推杆201复位,1s后plc的第一输出端输出
开门信号y0,通过电磁继电器j1的第一常闭触点使门机9开门;
44.当电梯重载时,即称重装置8测得的被困人员重量大于电梯配重时,控制按钮10的信号反馈到plc,称重装置8触发信号输入给plc,使电磁继电器j1第一常闭触点、第二常闭触点、第三常闭触点均断开、第一常开触点吸合,使电磁继电器j2第一常闭触点、第二常闭触点均断开,使交流接触器bzj第一常开触点、第二常开触点均吸合,延时继电器sjj线圈得电开始计时,开关电源t2的24v电压输出给电动推杆201及减速电机301,开关电源t1的110v电压给到抱闸线圈,在指定时间内抱闸5打开,减速电机301开始反向驱动,当超出指定时间,延时继电器sjj常闭触点断开,实现自动切断抱闸110v;当平层感应传感器1的信号传入plc,使电磁继电器j1线圈、电磁继电器j2线圈与交流接触器bzj线圈失电,使减速电机301停止旋转,抱闸线圈断电,电动推杆201复位,1s后plc的第一输出端输出开门信号y0,通过电磁继电器j1的第一常闭触点使门机9开门。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。