1.本技术实施例涉及机器人领域,尤其涉及一种柱形体攀爬机器人。
背景技术:
2.斜拉桥因跨度大、造型美观、经济适用等特点,在世界范围内得到了被广泛应用。作为斜拉桥主要承重构件的缆索,长期暴露在各种复杂的自然环境中,表面的聚乙烯护套会出现不同程度对的腐蚀、开裂、硬化、老化等现象,从而给护套内的钢丝造成锈蚀、断丝等破坏,因此对缆索的检测非常重要,它的可靠性直接影响了桥梁的安全性。为了确保缆索的安全使用,需要定期对缆索的安全性能进行检测和维护。
3.目前常用的检测方式还是以人工检测为主,人工检测劳动强度大、效率低,成本高,安全性较差。近年来针对检测与修复的缆索机器人不断发展,主要结构形式包括轮式、蠕动式、螺旋式、吸附式等,其中以轮式较为常见。目前普遍采用多边夹轮式攀爬机构,其具有运动连续、可靠性高、运动效率高、速度快、控制方便等诸多优点。
4.但实际用于缆索上时,机器人采用固定、封闭的轮式夹持结构,变径范围受外框限制,对缆索直径的变化适应性欠佳。
技术实现要素:
5.本技术实施例提供了一种柱形体攀爬机器人,用于适应不同尺径的柱形体。
6.本技术实施例提供的一种柱形体攀爬机器人,包括:
7.两个小车模块和调节张紧模块;
8.所述调节张紧模块为龙门式结构,包括横向架体及所述横向架体两侧设置的第一架体及第二架体,所述横向架体与所述两个小车模块中一个小车模块固定连接,所述第一架体与所述两个小车模块中的另一个小车模块的一侧连接,所述第二架体与所述另一个小车模块的另一侧连接,且两个所述小车模块可被调节至相对位置关系以包围所述柱形体;
9.所述第一架体和/或所述第二架体在所述横向架体的配合下,用于调节两个所述小车模块之间的相对距离以适应所述柱形体的尺径;
10.所述小车模块包括电机,所述小车模块在所述电机的驱动下可沿所述柱形体攀爬。
11.可选的,所述小车模块包括:车架、传动组件以及车轮组件;
12.所述电机设于所述车架上;
13.所述电机通过所述传动组件与所述车轮组件连接,以驱动车轮组件沿所述柱形体攀爬。
14.可选的,所述车轮组件包括:车轮轴、弹簧减震预紧机构、万向节、连接组件以及车轮;
15.所述连接组件与所述车架固定连接;
16.所述连接组件与所述弹簧减震预紧机构的一端活动连接,所述连接组件与所述万
向节的一端固定连接;
17.所述车轮与所述弹簧减震预紧机构的另一端连接且所述车轮与所述万向节的另一端固定连接;
18.所述车轮轴固定在所述连接组件且所述传动组件与所述车轮轴驱动连接,在所述传动组件的驱动下所述车轮可沿所述柱形体攀爬。
19.可选的,
20.所述横向架体设置有手轮,所述第一架体及第二架体中的任一架体设置有涡轮蜗杆传动机构及丝杆传动机构,同一架体的涡轮蜗杆传动机构及丝杆传动机构驱动连接;
21.所述横向架体通过固定基座与所述丝杆传动机构固定连接;
22.所述手轮通过所述第一架体的涡轮蜗杆传动机构带动所述第一架体的丝杆传动机构沿着所述第一架体的延伸方向进行运动,以调节所述横向架体与所述第一架体之间的距离;和/或,所述手轮通过所述第二架体的涡轮蜗杆传动机构带动所述第二架体的丝杆传动机构沿着所述第二架体的延伸方向进行运动,以调节所述横向架体与所述第二架体之间的距离。
23.可选的,
24.所述横向架体包括联动轴,所述联动轴的一端与所述手轮驱动连接;
25.所述联动轴分别与所述第一架体的涡轮蜗杆传动机构及所述第二架体的涡轮蜗杆传动机构驱动连接;
26.所述手轮通过所述联动轴驱动所述第一架体的涡轮蜗杆传动机构及所述第二架体的涡轮蜗杆传动机构的同步转动。
27.可选的,所述第一架体及所述第二架体中的任一架体包括:导向轴及与所述导向轴相互配合的通道基座;
28.所述通道基座固定安装于所述架体的延伸平面,且所述通道基座的延伸方向与所述架体的丝杆传动机构的运动方向相互平行;
29.所述导向轴的一端固定安装于所述固定基座,且所述导向轴贯穿于所述通道基座运动,所述导向轴及所述通道基座用于配合限制所述架体沿所述架体的所述丝杆传动机构的运动方向运动。
30.可选的,
31.所述第一架体通过活动连接件与所述两组小车模块中的另一组小车模块的一侧活动连接;
32.所述第二架体通过固定卡扣与所述另一组小车模块的另一侧可拆卸连接。
33.可选的,所述柱形体攀爬机器人还包括:两个负载牵引模块;
34.所述负载牵引模块为u型结构,包括固定杆及与所述固定杆侧向连接的两条压紧杆,所述u型结构的开口朝向所述柱形体;所述固定杆沿着与所述开口朝向相反的方向通过旋转轴与所述小车模块活动连接;
35.至少一条所述压紧杆设置有压掌及连接部;
36.所述连接部可通过牵引件连接沿着所述柱状体运动的负载设备。
37.可选的,所述负载牵引模块包括:两条可调节长度的连接杆;
38.一条所述压紧杆通过一条所述连接杆连接于所述固定杆,且所述连接杆的连接长
度可调节;
39.所述固定杆沿所述开口朝向的平行方向设置有通孔,所述通孔用于供所述旋转轴贯穿通过,以使所述固定杆通过所述旋转轴与所述车架旋转连接。
40.可选的,
41.所述两条压紧杆包括上压紧杆及下压紧杆,且仅所述下压紧杆设置有所述连接部;
42.所述固定杆的靠近所述下压紧杆的部分设有吊环;
43.所述固定杆通过一端连接所述吊环及一端连接所述车架的弹性件与所述车架活动连接。
44.从以上技术方案可以看出,本技术实施例具有以下优点:
45.柱形体攀爬机器人可以通过调节张紧模块,对两组小车模块间的相对距离进行调节,以适应不同尺径的柱形体,实现对较大尺径的柱形体的夹持,满足用户的需求。
附图说明
46.图1为本技术实施例中柱形体攀爬机器人一个示意图;
47.图2为本技术实施例中柱形体攀爬机器人另一示意图;
48.图3为本技术实施例中柱形体攀爬机器人的小车模块示意图;
49.图4为本技术实施例中柱形体攀爬机器人的传动组件示意图;
50.图5为本技术实施例中柱形体攀爬机器人的车轮组件示意图;
51.图6为本技术实施例中柱形体攀爬机器人的调节张紧模块示意图;
52.图7为本技术实施例中柱形体攀爬机器人的负载牵引模块示意图。
具体实施方式
53.本技术实施例提供了一种柱形体攀爬机器人,用于适应不同尺径的柱形体,主要应用于桥梁缆索场景,也可应用于路灯灯杆或圆柱类杆件的检测与维修、管道类外部检测等场景。
54.作为承重部件的缆索长期暴露在各种复杂的自然环境中,因此难免会出现老化,从而影响其可靠性。本技术实施例中的柱形体攀爬机器人可适应不同尺径的柱形体,以实现设定目的。
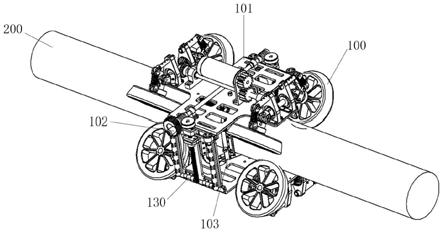
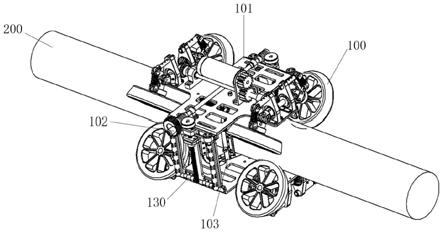
55.请参阅图1和图2,本技术实施例中柱形体攀爬机器人100的一个实施例包括:
56.两个小车模块101和调节张紧模块102;
57.所述调节张紧模块102为龙门式结构,包括横向架体104及所述横向架体104两侧设置的第一架体105及第二架体106,所述横向架体104与所述两个小车模块101中一个小车模块101固定连接,所述第一架体105与所述两个小车模块101中的另一个小车模块101的一侧连接,所述第二架体106与所述另一个小车模块101的另一侧连接,且两个所述小车模块101可被调节至相对位置关系以包围所述柱形体200;
58.所述第一架体105和/或所述第二架体106在所述横向架体104的配合下,用于调节两个所述小车模块101之间的相对距离以适应所述柱形体200的尺径;
59.所述小车模块101包括电机107,所述小车模块101在所述电机107的驱动下可沿所
述柱形体200攀爬。
60.本技术实施例中,柱形体攀爬机器人100可以通过调节张紧模块102,对两组小车模块101间的相对距离进行调节,以适应不同尺径的柱形体200,实现对较大尺径的柱形体200的夹持,满足用户的需求。
61.为便于理解,下面对本技术实施例中的柱形体攀爬机器人100进行具体描述:
62.请参阅图1、图3、图4和图5,柱形体攀爬机器人100包括小车模块101,小车模块101包括:电机107、车架108、传动组件109和车轮组件110。
63.其中,传动组件109包括:第一传动机构111、第二传动机构112、传动轴113和轴承座114。车轮组件110包括:车轮轴115、弹簧减震预紧机构116、万向节117、连接组件118以及车轮119。连接组件118包括:底座120和连杆121。
64.电机107固定设置在车架108上,且与第一传动机构111驱动连接,用于给小车模块101提供动力。轴承座114固定在车架108上,用于限制传动轴113。传动轴113在第一传动机构111的带动下驱动与其连接的第二传动机构112,以将驱动传至车轮组件110。
65.车轮组件110中的车轮轴115与第二传动机构112驱动连接。车轮组件110中的底座120设于车架108上,起固定作用。底座120上设有通孔,车轮轴115贯穿通孔驱动对称的两边车轮119以实现小车模块101沿柱形体200的攀爬。万向节117设置于底座120与车轮119之间,万向节117一端与底座120固定连接,另一端与车轮119固定连接,以用于调节车轮119的张角大小,适应柱形体200的尺径。底座120上设置有连杆121,弹簧减震预紧机构116的一端与连杆121铰接,另一端与车轮119铰接,以保证高越障性能的实现。
66.本技术实施例中的第一传动机构111可以是圆柱齿轮传动机构,也可以是同步带传动机构等可实现传动功能的机构,具体此处不做限定。
67.本技术实施例中的第二传动机构112可以是锥齿轮传动机构,也可以是蜗轮蜗杆传动机构等可实现传动功能的机构,具体此处不做限定。
68.本实施例中,小车模块101可通过电机107驱动车轮119实现攀爬功能。小车模块101还具有万向节117,可对车轮119的张角进行调节以适应柱形体200的尺径,更好地贴附在柱形体200表面。小车模块101的弹簧减震预紧机构116使得越障性能提高,满足了用户的需求。
69.请参阅图1、图2、图3和图6,柱形体攀爬机器人100包括调节张紧模块102。调节张紧模块102为龙门式结构,包括:横向架体104、第一架体105和第二架体106。
70.其中,横向架体104包括手轮122、轴承座123和联动轴124。第一架体105包括:架体传动机构(实施例中以蜗轮蜗杆传动机构125为例)、固定基座126、丝杆传动机构127、导向轴128和与导向轴128相互配合的通道基座129。第二架体106与第一架体105类似,此处不再赘述。
71.可以理解的是,架体传动机构可以是蜗轮蜗杆传动机构125,也可以是锥型齿轮传动机构等可实现传动功能的机构,具体此处不做限定。
72.横向架体104中的轴承座123固定设置在小车模块101的车架108上,用于限制联动轴124。联动轴124的一端与手轮122驱动连接,且联动轴124分别与第一架体105的蜗轮蜗杆传动机构125和第二架体106的蜗轮蜗杆传动机构125驱动连接。手轮119可通过联动轴124驱动两个蜗轮蜗杆传动机构125同步传动。
73.第一架体105的蜗轮蜗杆传动机构125固定于固定基座126上,且与丝杆传动机构127驱动连接。固定基座126与小车模块101的车架108固定连接。通道基座129安装于第一架体105的表面,且通道基座129的延伸方向与丝杆传动机构127的运动方向平行。导向轴128的一端固定安装于固定基座126,且导向轴128贯穿于通道基座129运动,导向轴128和通道基座129用于配合限制第一架体105沿丝杆传动机构127的运动方向运动。第二架体106的连接情况与第一架体105的类似,此处不再赘述。
74.第一架体105于远离横向架体104的一边通过活动连接件130与两组小车模块101中的一组的一侧活动连接。第二架体106于远离横向架体104的一边通过固定卡扣131与上述的一组小车模块的另一侧可拆卸连接。当手轮122通过联动轴124带动两边的蜗轮蜗杆传动机构125同步传动时,两边的丝杆传动机构127沿着各自的架体的延伸方向进行运动,以调节两组小车模块101之间的距离。
75.可以理解的是,活动连接件130可以是铰链,也可以是固定卡扣等可实现活动连接功能的机构,具体此处不做限定。
76.本实施例中,柱形体攀爬机器人100的调节张紧模块102可通过手轮122对两组小车模块101的相对距离进行单自由度调节,以适应不同范围尺径的柱形体200。且小车模块101和调节张紧模块102通过铰链和固定卡扣等可拆卸连接,实现了柱形体攀爬机器人100的快速安装拆卸,方便用户操作。
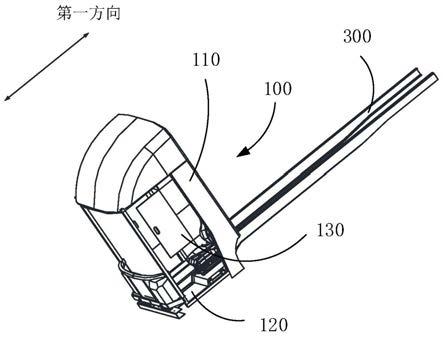
77.请参阅图1、图2、图3和图7,柱形体攀爬机器人100还包括两个负载牵引模块103。负载牵引模块103为u型结构,且u型结构的开口朝向柱形体。负载牵引模块103包括:固定杆132、两条连接杆133、上压紧杆134、下压紧杆135和两个压掌136。
78.两条连接杆133为l型结构,每条连接杆133一端与固定杆132连接,另一端与压紧杆连接,且连接杆133的连接长度可调节,用于适应不同尺径的柱形体200。固定杆132沿着与负载牵引模块103开口朝向相反的方向设置有通孔,通孔用于供旋转轴137贯穿通过,以使固定杆132通过旋转轴137与小车模块101的车架108旋转连接。上压紧杆134上设置有一个压掌136,下压紧杆135也设置一个与上述压掌相对的压掌136,且下压紧杆135的压掌136所处面的背面上设置有吊耳138,以通过两个压掌136抱紧柱形体200提供摩擦力,于吊耳138处拖拽负载设备。
79.在负载重力的作用下,负载牵引模块103绕旋转轴137转动,使每组模块的上下压掌136抱紧柱形体200表面并提供摩擦支撑力,在结构件强度范围内,负载重力越大,压掌136提供的摩擦支撑力越大,可实现大负载设备的牵引拖拽。
80.固定杆132的靠近下压紧杆135的部分设有吊环139,固定杆132通过一端连接吊环139及一端连接小车模块101的车架108的拉伸弹簧140与车架108活动连接,以实现吊耳138上没有牵引负载设备的情况下,负载牵引模块103能够在拉伸弹簧140的作用下复位。
81.本实施例中,负载牵引模块103可以通过压掌136抱紧柱形体200提供足够的摩擦力来牵引负载设备,在不牵引负载设备的情况下,负载牵引模块103复位,防止压掌136与柱形体接触产生不必要的摩擦。
82.以上内容时结合具体实施例方式对本技术做出的说明,不能认定为本技术的具体实施仅限于这些实施例。对于本技术所属技术领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干的变换与替换,此时都应视为属于本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。