技术特征:
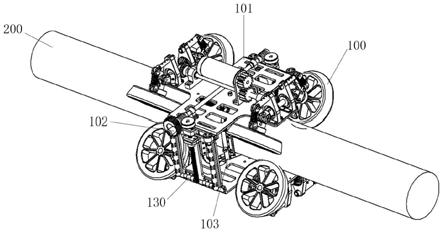
1.一种柱形体攀爬机器人,其特征在于,包括:两个小车模块和调节张紧模块;所述调节张紧模块为龙门式结构,包括横向架体及所述横向架体两侧设置的第一架体及第二架体,所述横向架体与所述两个小车模块中一个小车模块固定连接,所述第一架体与所述两个小车模块中的另一个小车模块的一侧连接,所述第二架体与所述另一个小车模块的另一侧连接,且两个所述小车模块可被调节至相对位置关系以包围所述柱形体;所述第一架体和/或所述第二架体在所述横向架体的配合下,用于调节两个所述小车模块之间的相对距离以适应所述柱形体的尺径;所述小车模块包括电机,所述小车模块在所述电机的驱动下可沿所述柱形体攀爬。2.根据权利要求1所述的柱形体攀爬机器人,其特征在于,所述小车模块包括:车架、传动组件以及车轮组件;所述电机设于所述车架上;所述电机通过所述传动组件与所述车轮组件连接,以驱动车轮组件沿所述柱形体攀爬。3.根据权利要求2所述的柱形体攀爬机器人,其特征在于,所述车轮组件包括:车轮轴、弹簧减震预紧机构、万向节、连接组件以及车轮;所述连接组件与所述车架固定连接;所述连接组件与所述弹簧减震预紧机构的一端活动连接,所述连接组件与所述万向节的一端固定连接;所述车轮与所述弹簧减震预紧机构的另一端连接且所述车轮与所述万向节的另一端固定连接;所述车轮轴固定在所述连接组件且所述传动组件与所述车轮轴驱动连接,在所述传动组件的驱动下所述车轮可沿所述柱形体攀爬。4.根据权利要求1所述的柱形体攀爬机器人,其特征在于,所述横向架体设置有手轮,所述第一架体及第二架体中的任一架体设置有架体传动机构及丝杆传动机构,同一架体的架体传动机构及丝杆传动机构驱动连接;所述横向架体通过固定基座与所述丝杆传动机构固定连接;所述手轮通过所述第一架体的架体传动机构带动所述第一架体的丝杆传动机构沿着所述第一架体的延伸方向进行运动,以调节所述横向架体与所述第一架体之间的距离;和/或,所述手轮通过所述第二架体的架体传动机构带动所述第二架体的丝杆传动机构沿着所述第二架体的延伸方向进行运动,以调节所述横向架体与所述第二架体之间的距离。5.根据权利要求4所述的柱形体攀爬机器人,其特征在于,所述横向架体包括联动轴,所述联动轴的一端与所述手轮驱动连接;所述联动轴分别与所述第一架体的架体传动机构及所述第二架体的架体传动机构驱动连接;所述手轮通过所述联动轴驱动所述第一架体的架体传动机构及所述第二架体的架体传动机构的同步转动。6.根据权利要求4所述的柱形体攀爬机器人,其特征在于,所述第一架体及所述第二架体中的任一架体包括:导向轴及与所述导向轴相互配合的通道基座;所述通道基座固定安装于所述架体的延伸平面,且所述通道基座的延伸方向与所述架
体的丝杆传动机构的运动方向相互平行;所述导向轴的一端固定安装于所述固定基座,且所述导向轴贯穿于所述通道基座运动,所述导向轴及所述通道基座用于配合限制所述架体沿所述架体的所述丝杆传动机构的运动方向运动。7.根据权利要求1所述的柱形体攀爬机器人,其特征在于,所述第一架体通过活动连接件与所述两组小车模块中的另一组小车模块的一侧活动连接;所述第二架体通过固定卡扣与所述另一组小车模块的另一侧可拆卸连接。8.根据权利要求1所述的柱形体攀爬机器人,其特征在于,所述柱形体攀爬机器人还包括:两个负载牵引模块;所述负载牵引模块为u型结构,包括固定杆及与所述固定杆侧向连接的两条压紧杆,所述u型结构的开口朝向所述柱形体;所述固定杆沿着与所述开口朝向相反的方向通过旋转轴与所述小车模块活动连接;至少一条所述压紧杆设置有压掌及连接部;所述连接部可通过牵引件连接沿着所述柱状体运动的负载设备。9.根据权利要求8所述的柱形体攀爬机器人,其特征在于,所述负载牵引模块包括:两条可调节长度的连接杆;一条所述压紧杆通过一条所述连接杆连接于所述固定杆,且所述连接杆的连接长度可调节;所述固定杆沿所述开口朝向的平行方向设置有通孔,所述通孔用于供所述旋转轴贯穿通过,以使所述固定杆通过所述旋转轴与所述车架旋转连接。10.根据权利要求8所述的柱形体攀爬机器人,其特征在于,所述两条压紧杆包括上压紧杆及下压紧杆,且仅所述下压紧杆设置有所述连接部;所述固定杆的靠近所述下压紧杆的部分设有吊环;所述固定杆通过一端连接所述吊环及一端连接所述车架的弹性件与所述车架活动连接。
技术总结
本申请实施例公开了一种柱形体攀爬机器人,用于适应不同尺径的柱形体。具体包括:两个小车模块和调节张紧模块;龙门式调节张紧模块包括横向架体及横向架体两侧设置的第一架体及第二架体,横向架体与两个小车模块中一个小车模块连接,第一架体与两个小车模块中的另一个小车模块的一侧连接,第二架体与另一个小车模块的另一侧连接,以调节两个小车模块之间的相对距离以适应柱形体的尺径;小车模块在电机的驱动下可沿所述柱形体攀爬。的驱动下可沿所述柱形体攀爬。的驱动下可沿所述柱形体攀爬。
技术研发人员:丁宁 胡小立 张爱东
受保护的技术使用者:深圳市人工智能与机器人研究院
技术研发日:2021.09.09
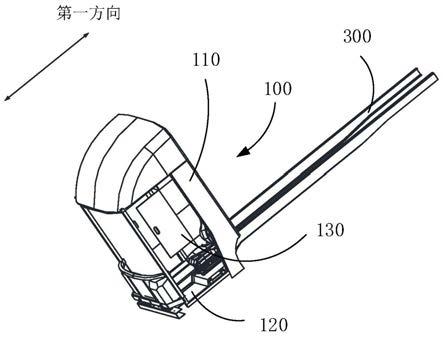
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。