1.本发明属于特种机器人的技术领域,特别涉及一种水陆两栖式的清洁机器人装置。
背景技术:
2.石油化工类大型储罐、核电站等工业类管道、水库涵洞等在实际工作过程中会长时间受振动、压力、腐蚀等外部因素的影响,易发生泄漏事故,造成严重的经济损失,也会对环境带来危害,更有甚者会危及居民和国家安全。为使其安全稳定的工作并延长其使用寿命,必须定期的对相关设施进行清洁与维修。随着人工成本、对工作效率要求和工作环境安全系数的不断提高,特种清洁机器人的用途越发广泛。
3.但目前特种清洁机器人的工作环境单一、使用功能都具有极强的针对性,在一些环境下难以使用,更难以实现一机多用。
技术实现要素:
4.为了解决上述问题,本发明提出了一种水陆两栖履带式清洁机器人。该机器人可适应水陆两栖不同工作环境,模块化设计、结构简洁,具有优越性。
5.本发明可用于清洁大型浮顶储油罐、大型化工储罐、液化天然气储罐等需进行定期清洁并存在较大人工清洁风险的储罐;清洁核电站核岛稳压器及其相应管道、阀门等组成的一回路系统、常规岛给水泵及相应管道、阀门等组成的二回路系统、大型水利工程管网、城市给排水管道系统等需定期清洁、疏通且无法人工到达的管道网络;或清理河流及航道底部、水库涵洞、海底及地面的淤泥与小型垃圾。
6.本发明的技术方案是:一种水陆两栖履带式清洁机器人,包括承重架、两组履带式行走机构、置于机体前端的三自由度抬升摆动机构、安装于机体后端的三自由度高压水射流云台、两个驱动电机、安装于机体外部的离心抽污泵吸污系统、机器人视觉及检测控制系统;三自由度抬升摆动机构的第一电动推杆通过固定件与承重架相连;第二电动推杆通过固定件安装于机体前端的三自由度抬升摆动机构内部;置于机体前端的三自由度抬升摆动机构通过空心铆钉与第一电动推杆与承重架相连;安装于机体后端的三自由度高压水射流云台通过螺母柱与承重架相连;两个驱动电机分别与承重架通过电机支架相连,且位于承重架前端两侧;两组履带式行走机构通过螺丝与承重架相连,且位于承重架两侧;两组履带式行走机构分别与置于承重架前端两侧的驱动电机连接。
7.优选地,履带式行走机构包括履带横梁架、行走机构外侧盖板、一个驱动轮、两块承重轮支撑板、一个承重轮、两个导向轮支撑件、八个导向轮和三个支撑轮;行走机构外侧盖板通过螺丝与履带横梁架相连;两块承重轮支撑板分别位于履带横梁架两侧;所述承重轮通过轴与承重轮支撑板相连;八个导向轮两两组合分别通过轴与导向轮支撑件相连后,导向轮支撑件再通过销分别与履带横梁架相连接;所述支撑轮通过轴与履带横梁架相连;
驱动电机与驱动轮相连接。
8.优选地,置于机体前端的三自由度抬升摆动机构包括第一电动推杆、第二电动推杆、两个电动推杆固定件、两个耳轴架、两块耳轴板、连接台、摆动头、摆动推杆;两个耳轴架分别与承重架前端相连,所述第一电动推杆通过电动推杆固定件与承重架相连,所述第二电动推杆通过电动推杆固定件固定在摆动头内部,两块耳轴板分别安装于两个耳轴架外侧,所述连接台通过空心铆钉分别与两侧的耳轴板相连接,且通过销与第一电动推杆相连,所述摆动头通过空心铆钉分别与连接台上下相连,所述摆动推杆通过螺母柱与第二电动推杆前端相连,且通过空心铆钉与摆动头相连。
9.优选地,安装于机体后端的三自由度高压水射流云台包括水射流喷射头、高压水射流固定架、三个高压水射流支撑架、三个舵机固定架、三个小型法兰、三个舵机、轴承、两块轴承内板、云台支撑板、上水软管;三个高压水射流支撑架分别为第一高压水射流支撑架、第二高压水射流支撑架以及第三高压水射流支撑架,三个舵机固定架分别为第一舵机固定架、第二舵机固定架以及第三舵机固定架,三个舵机分别为第一舵机、第二舵机以及第三舵机,三个小型法兰分别为第一小型法兰、第二小型法兰以及第三小型法兰;所述云台支撑板通过螺母柱于机器人顶盖相连,所述轴承安装在云台支撑板上,所述轴承内板分别安装在轴承两侧,第一舵机固定架安装于承重架后方,所述第一舵机安装于第一舵机固定架内,所述第一小型法兰于下方轴承内板相连,所述第一舵机与第一小型法兰相连,所述第一高压水射流支撑架、第二高压水射流支撑架底部相连,所述第一高压水射流支撑架、第二高压水射流支撑架分别与第二小型法兰、第三小型法兰连接,且在内部异侧连接第二舵机、第三舵机固定架,所述第二舵机、第三舵机分别与第二舵机固定架、第三舵机固定架相连,所述的第二舵机固定架与上方轴承内板相连,所述第三高压水射流支撑架与第三舵机固定架相连,且与高压水射流固定架相连,所述水射流喷射头置于高压水射流固定架内,所述上水软管与水射流喷射头相连。
10.优选地,安装于机体外部的离心抽污泵吸污系统包括离心抽污泵、吸污头;所述吸污头与所述三自由度抬升摆动机构前端相连,吸污头通过吸污软管连接离心抽污泵。
11.优选地,所述的机器人控制系统、视觉及检测系统包括机器人双控系统、两个探照灯、两个摄像头、机器人前部支架。所述的机器人前部支架与机器人摆动头相连,两个探照灯及两个摄像头分别与机器人前部支架及第三高压水射流支撑架相连。
12.本发明有益效果在于:本发明提供一种水陆两栖履带式清洁机器人,履带式行走机构支撑面积大,下陷度小,以能够增强机器人对未知复杂地形的适应能力。三自由抬升摆动机构通过两个电动推杆满足机器人前端灵活的三自由度需求、三自由度高压水射流云台针对具有一定高度的特殊污垢进行冲刷冲洗处理、吸污头可根据不同目标物以及应用场景进行切换、离心抽污泵吸污系统可无差别对目标物进行吸取处理,四者相互配合,共同增强机器人对不同未知工作环境下的作业能力。机器人视觉及检测系统通过机器人搭载的探照灯及摄像头分辨目标物,实时反馈给机器人操作员,增强机器人的人机交互及作业能力。
附图说明
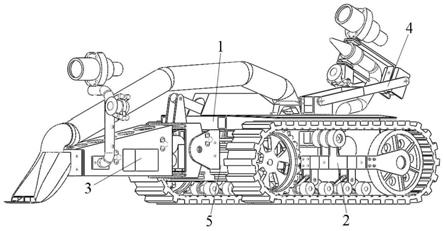
13.图1是本发明的结构示意图;
图2是底座承重架示意图;图3是履带行走机构示意图;图4是三自由度抬升摆动机构示意图;图5是三自由度高压水射流云台;图6是本发明结构左视图;图7是本发明结构俯视图;图中:底盘承重架1、承重架底座1
‑
1、承重架顶架1
‑
2、机器人顶盖1
‑
3、机器人后盖1
‑
4、不锈钢把手1
‑
5、履带式行走机构2、履带横梁架2
‑
1、驱动轮2
‑
2、承重轮支撑板2
‑
3、承重轮2
‑
4、导向轮支撑件2
‑
5、导向轮2
‑
6、电机支架2
‑
7、支撑轮2
‑
8、行走机构外侧盖板2
‑
9、履带2
‑
10、三自由度抬升摆动机构3、耳轴架3
‑
1、耳轴板3
‑
2、连接台3
‑
3、电动推杆固定件3
‑
4、第一电动推杆3
‑
5、摆动推杆3
‑
6、摆动头3
‑
7、电动推杆固定架3
‑
8、第二电动推杆3
‑
9、三自由度高压水射流云台4、第一舵机固定架4
‑1‑
1、第二舵机固定架4
‑1‑
2、第三舵机固定架4
‑1‑
3、第一高压水射流支撑架4
‑2‑
1、第二高压水射流支撑架4
‑2‑
2、第三高压水射流支撑架4
‑2‑
3、第一舵机4
‑3‑
1、第二舵机4
‑3‑
2、第三舵机4
‑3‑
3、轴承内板4
‑
4、轴承4
‑
5、云台支撑板4
‑
6、螺母柱4
‑
7、水射流喷射头4
‑
8、上水软管4
‑
9、第一小型法兰4
‑
10
‑
1、第二小型法兰4
‑
10
‑
2、第三小型法兰4
‑
10
‑
3、[邸1] 驱动电机5、吸污头6
‑
1、吸污软管6
‑
2、机器人前部支架7
‑
1、前置探照灯固定夹7
‑
2、前置探照灯7
‑
3、前置摄像头固定夹7
‑
4、前置摄像头7
‑
5、后置摄像头固定夹7
‑
6、后置摄像头7
‑
7、后置探照灯固定夹7
‑
8、后置探照灯7
‑
9。
[0014]
具体实施方式:为了使本技术领域的人员更好地理解本技术中的技术方案,下面对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术终地实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
[0015]
下面结合附图对本发明的技术方案做进一步的详细描述:如图1
‑
7所示,一种水陆两栖履带式清洁机器人,包括承重架1、两组履带式行走机构2、置于机体前端的三自由度抬升摆动机构3、安装于机体后端的三自由度高压水射流云台4、两个驱动电机5、安装于机体外部的离心抽污泵吸污系统、机器人视觉及检测控制系统;三自由度抬升摆动机构3的第一电动推杆3
‑
5通过固定件与承重架1相连;第二电动推杆3
‑
9通过固定件安装于机体前端的三自由度抬升摆动机构3内部;置于机体前端的三自由度抬升摆动机构3通过空心铆钉与第一电动推杆3
‑
5与承重架1相连;安装于机体后端的三自由度高压水射流云台4通过螺母柱与承重架1相连;两个驱动电机5分别与承重架1通过电机支架2
‑
7相连,且位于承重架1前端两侧;两组履带式行走机构2通过螺丝与承重架1相连,且位于承重架1两侧;两组履带式行走机构2分别与置于承重架1前端两侧的驱动电机5连接。
[0016]
优选地,履带式行走机构2包括履带横梁架2
‑
1、行走机构外侧盖板2
‑
9、一个驱动轮2
‑
2、两块承重轮支撑板2
‑
3、一个承重轮2
‑
4、两个导向轮支撑件2
‑
5、八个导向轮2
‑
6和三个支撑轮2
‑
8;行走机构外侧盖板2
‑
9通过螺丝与履带横梁架2
‑
1相连;两块承重轮支撑板2
‑
3分别位于履带横梁架2
‑
1两侧;所述承重轮2
‑
4通过轴与承重轮支撑板2
‑
3相连;八个导向
轮2
‑
6两两组合分别通过轴与导向轮支撑件2
‑
5相连后,导向轮支撑件2
‑
5再通过销分别与履带横梁架2
‑
1相连接;所述支撑轮2
‑
8通过轴与履带横梁架2
‑
1相连;驱动电机5与驱动轮2
‑
2相连接。
[0017]
优选地,置于机体前端的三自由度抬升摆动机构3包括第一电动推杆3
‑
5、第二电动推杆3
‑
9、两个电动推杆固定件3
‑
4、两个耳轴架3
‑
1、两块耳轴板3
‑
2、连接台3
‑
3、摆动头3
‑
7、摆动推杆3
‑
6;两个耳轴架3
‑
1分别与承重架1前端相连,所述第一电动推杆3
‑
5通过电动推杆固定件3
‑
4与承重架1相连,所述第二电动推杆3
‑
9通过电动推杆固定件3
‑
4固定在摆动头3
‑
7内部,两块耳轴板3
‑
2分别安装于两个耳轴架3
‑
1外侧,所述连接台3
‑
3通过空心铆钉分别与两侧的耳轴板3
‑
2相连接,且通过销与第一电动推杆3
‑
5相连,所述摆动头3
‑
7通过空心铆钉分别与连接台3
‑
3上下相连,所述摆动推杆3
‑
6通过螺母柱与第二电动推杆3
‑
9前端相连,且通过空心铆钉与摆动头3
‑
7相连。
[0018]
优选地,安装于机体后端的三自由度高压水射流云台4包括水射流喷射头4
‑
8、高压水射流固定架、三个高压水射流支撑架、三个舵机固定架、三个小型法兰、三个舵机、轴承4
‑
5、两块轴承内板4
‑
4、云台支撑板4
‑
6、上水软管4
‑
9;三个高压水射流支撑架分别为第一高压水射流支撑架4
‑2‑
1、第二高压水射流支撑架4
‑2‑
2以及第三高压水射流支撑架4
‑2‑
3,三个舵机固定架分别为第一舵机固定架4
‑1‑
1、第二舵机固定架4
‑1‑
2以及第三舵机固定架4
‑1‑
3,三个舵机分别为第一舵机4
‑3‑
1、第二舵机4
‑3‑
2以及第三舵机4
‑3‑
3,三个小型法兰分别为第一小型法兰4
‑
10
‑
1、第二小型法兰4
‑
10
‑
2以及第三小型法兰4
‑
10
‑
3;所述云台支撑板4
‑
6通过螺母柱于机器人顶盖相连,所述轴承4
‑
5安装在云台支撑板4
‑
6上,所述轴承内板4
‑
4分别安装在轴承4
‑
5两侧,第一舵机固定架4
‑1‑
1安装于承重架1后方,所述第一舵机4
‑3‑
1安装于第一舵机固定架4
‑1‑
1内,所述第一小型法兰4
‑
10
‑
1于下方轴承内板4
‑
4相连,所述第一舵机4
‑3‑
1与第一小型法兰4
‑
10
‑
1相连,所述第一高压水射流支撑架4
‑2‑
1、第二高压水射流支撑架4
‑2‑
2底部相连,所述第一高压水射流支撑架4
‑2‑
1、第二高压水射流支撑架4
‑2‑
2分别与第二小型法兰4
‑
10
‑
2、第三小型法兰4
‑
10
‑
3连接,且在内部异侧连接第二舵机4
‑3‑
2、第三舵机固定架4
‑1‑
3,所述第二舵机4
‑3‑
2、第三舵机4
‑3‑
3分别与第二舵机固定架4
‑1‑
2、第三舵机固定架4
‑1‑
3相连,所述的第二舵机固定架4
‑1‑
2与上方轴承内板4
‑
4相连,所述第三高压水射流支撑架4
‑2‑
3与第三舵机固定架4
‑1‑
3相连,且与高压水射流固定架4
‑
11相连,所述水射流喷射头4
‑
8置于高压水射流固定架内,所述上水软管4
‑
9与水射流喷射头4
‑
8相连。
[0019]
优选地,安装于机体外部的离心抽污泵吸污系统包括离心抽污泵、吸污头6
‑
1;所述吸污头6
‑
1与所述三自由度抬升摆动机构前端相连,吸污头6
‑
1通过吸污软管6
‑
2连接离心抽污泵。离心抽污泵可根据需求搭载于机器人或其余合适位置。
[0020]
优选地,机器人控制系统、视觉及检测系统包括机器人双控系统、两个探照灯、两个摄像头、机器人前部支架。机器人前部支架7
‑
1与机器人摆动头3
‑
7相连,两个探照灯7
‑
3、7
‑
8及两个摄像头7
‑
5、7
‑
7分别与机器人前部支架7
‑
1及第三高压水射流支撑架4
‑2‑
3相连,前置探照灯7
‑
3通过前置探照灯固定夹7
‑
2固定,前置摄像头7
‑
5通过前置摄像头固定夹7
‑
4固定,后置摄像头7
‑
7通过后置摄像头固定夹7
‑
6固定,后置探照灯7
‑
9通过后置探照灯固定夹7
‑
8固定。
[0021]
综上所述,本发明的工作原理如下:
本发明中,底盘为“工”形与“口”形的结合承重架,两组履带行走机构2通过螺丝分别连接于底盘承重架两侧,整体构成本发明的行走机构。置于机体前端的三自由度抬升摆动机构3由耳轴架3
‑
1通过螺丝与承重架顶架1
‑
2相连,电动推杆固定架3
‑
8通过螺丝与承重架底座1
‑
1相连。安装于机体后端的三自由度高压水射流云台整体由螺母柱4
‑
7与机器人顶盖1
‑
3相连,两个驱动电机5通过电机支架2
‑
7与驱动轮2
‑
2两者结合固定后由电机支架2
‑
7和承重架顶架1
‑
2固定,使得两个驱动电机5分别固定于底盘承重架1前端两侧。
[0022]
清洁机器人移动时,底座承重架1前端的两个驱动电机5分别驱动带动前侧驱动轮2
‑
2转动,从而驱动机器人向前移动。同时,机器人转弯、后退、掉头都采用坦克转弯及运动原理进行。
[0023]
清洁机器人工作时,针对于位于类地面位置的目标清洁物,机器人通过前置探照灯7
‑
3、前置摄像头7
‑
5对清洁物进行识别,由置于机体前端的三自由度抬升摆动机构3通过由第一电动推杆3
‑
5和第二电动推杆3
‑
9配合工作进行灵活的抬升摆动使得吸污头6
‑
1到达目标清洁物位置。此时,外置离心抽污泵开始工作,通过吸污头6
‑
1,经过吸污软管6
‑
2,将目标清洁物进行处理从而达到清洁效果。
[0024]
清洁机器人工作时,针对于位于类高于地面位置的目标清洁物,机器人通过后置探照灯7
‑
9、后置摄像头7
‑
7对清洁物进行识别后,安装于机体后端的三自由度高压水射流云台通过三个舵机4
‑
3相互配合,使得水射流喷射头4
‑
8对准目标清洁物后,高压水射流启动冲洗清洁目标清洁物。此时,机器人通过前置探照灯7
‑
3、前置摄像头7
‑
5对清洁物进行识别,由置于机体前端的三自由度抬升摆动机构3通过由第一电动推杆3
‑
5和第二电动推杆3
‑
9配合工作进行灵活的抬升摆动使得吸污头6
‑
1到达目标清洁物位置。此时,外置离心抽污泵开始工作,通过吸污头6
‑
1,经过吸污软管6
‑
2,将目标清洁物进行处理从而达到清洁效果。
[0025]
清洁机器人工作时,针对上述两种情况结合的工作环境或类地面位置的工作环境下,机器人亦可通过前置探照灯7
‑
3、前置摄像头7
‑
5对清洁物进行识别驱动置于机体前端的三自由度抬升摆动机构3工作的同时,后置探照灯7
‑
9、后置摄像头7
‑
7对清洁物进行识别,安装于机体后端的三自由度高压水射流云台通过三个舵机4
‑
3相互配合,使得水射流喷射头4
‑
8同步工作,使得位于高处或地面的目标清洁物被更好的清洁,提高机器人工作效率和工作质量。
[0026]
以上述所述实施例的各技术特征可以进行任意的组合,为使简述描述,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合,不存在矛盾,都应当认为是本说明书记载的范围。
[0027]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。