1.本发明属于数字测试技术领域,尤其涉及一种基于幅度转换时序的高精度数字抖动注入装置。
背景技术:
2.当前,随着数字电路系统之间传输速率达到gbps级,高速率下的数据传输准确性与稳定性成为评价数字系统是否正常、稳定工作的重要判据。而数字信号在时序上的抖动又是影响数据在高速率下正确传递的关键因素。通过对波形数据信号产生多种类型的幅度、频率可控的抖动,使波形数据信号针对性的产生抖动分量,从而满足现代数字信号领域中高速数字系统的抖动性能测试。
3.在当前的抖动合成方法中,最为常用的有基于延时链和基于模拟调制两种方法。其中,采用基于延时链的方法受限于延时链的精度和线性度,抖动幅度和频率参数可调性差,影响抖动注入精度。基于模拟调制方法是通过对信号的调制实现抖动产生。两个信号发生器的其中一信号发生器作为调制源,产生调制信号;另一信号发生器作为时钟源,用于产生抖动的时钟,并同时将它作为产生码型信号的时钟,实现加抖的数据码型。该方法需要多个仪器的配合,系统组建复杂、仪器同步困难,并且模拟信号作为调制信号会直接引入难以消除的噪声,影响抖动合成的效果,抖动注入精度较低。
技术实现要素:
4.本发明的目的在于:提供一种基于幅度转换时序的高精度数字抖动注入装置,以解决抖动合成方法基于延时链和基于模拟调制两种常用方法中存在的抖动幅度和频率参数可调性差、抖动注入精度低的问题。
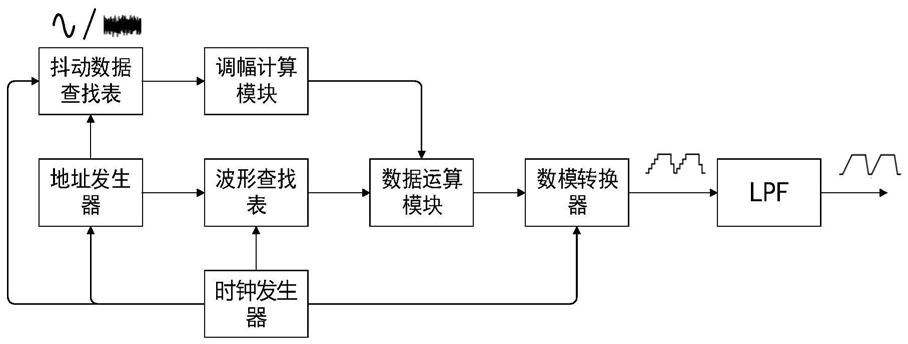
5.一种基于幅度转换时序的高精度数字抖动注入装置,包括:时钟发生器、地址发生器、波形查找表、抖动数据查找表、调幅计算模块、数据运算模块、数模转换器以及低通滤波器lpf;
6.时钟发生器为可变时钟发生器,根据设定的采样率产生用于控制地址发生器、波形查找表、抖动数据查找表以及数模转换器的时钟信号;
7.地址发生器用于接收来自时钟发生器的时钟信号,并以该时钟信号为时序控制信号,产生用于波形查找表和抖动数据查找表寻址查找波形样点数据的地址;
8.波形查找表接收来自地址发生器产生的地址,其内存储有各种原始波形样点数据,以地址发生器提供的地址为依据,通过寻址的方式查找出每个地址对应的波形样点数据;
9.抖动数据查找表接收来自地址发生器产生的地址,其内存储有各种不同类型的抖动样点数据,以地址发生器提供的地址为依据,通过寻址的方式查找出每个地址对应的原始抖动样点数据提供给调幅计算模块;
10.调幅计算模块以设定的时序抖动幅度要求为依据,对来自抖动数据查找表的原始
抖动样点数据进行调整,并将调整后的抖动样点数据提供给数据运算模块;
11.数据运算模块用于接收来自波形查找表的波形样点数据和来自调幅计算模块的抖动样点数据,并根据不同的抖动注入类型,采用与抖动注入类型相匹配的数据计算方式,得到加抖后的数据信号波形样点数据;
12.数模转换器接收来自时钟发生器产生的时钟信号,以及来自数据运算模块的数据信号波形样点数据,并以时钟信号为时序控制信号对上一行的数据信号波形样点数据进行数字模拟转换得到模拟信号,然后将转换后的模拟信号送入低通滤波电器lpf;
13.低通滤波器lpf对数模转换器输出的模拟信号进行低通滤波去除杂散信号,提升脉冲波形纯度。
14.进一的,所述数据运算模块根据不同的抖动注入需求,采用与抖动注入类型相匹配的数据幅度直接相加、或筛选出边沿数据样点的方式,得到加抖后的数据信号波形样点数据。
15.本发明的原理:
16.信号的边沿跳变时刻偏离了理想信号的边沿跳变时刻即为信号在时序上的抖动。数字信号边沿在时序上的偏移量化为抖动的幅度。用常用的抖动分析方法—时间间隔误差(time interval error,tie),可以分析和定义出抖动幅度数据的特性、类型、正弦、方波、高斯等。基于此,本发明利用幅度转换时序的原理(幅度转换时序原理可参阅图2),将地址发生器与时钟发生器相连,使地址发生器产生的地址与时序关联,通过波形查找表查找出与地址对应的原始波形样点数据,通过抖动数据查找表查找出原始抖动样点数据。然后利用调幅运算模块和数据运算模块,针对不同的数据抖动幅度和抖动类型的注入要求,采用与抖动注入类型相匹配的数据直接幅度相加、或筛选出边沿数据样点即改变原本波形信号数据的边沿样点幅度数据的方式,实现加抖的目的。
17.本发明的加抖由数据运算模块实现,且在加抖过程中,采用不同于现有的以模拟信号作为调制信号的方式,即数据运算模块在加抖过程中是以原始波形样点作为基础数据,根据实际需求,直接对原始波形样点进行加抖,能够使最终波形样点数据的抖动注入精度量级达到垂直分辨率再除以波形数据信号压摆率后的数据精度量级,具有更高的抖动注入精度。在信号抖动幅度的调节方面,本发明直接通过调幅运算模块对原始波形的幅度进行调节;在信号抖动频率的调节方面,本发明的可变时钟发生器同时连接控制地址发生器、波形查找表、抖动数据查找表、以及数模转换器,通过改变采样率的方式即可实现。相较于现有基于延时链方法,本发明抖动幅度和频率参数可调性更好,且操作更简单。此外,通过可变时钟发生器、地址发生器、波形查找表、抖动数据查找表、以及数模转换器、调幅计算模块与数据运算模块的共同作用,可同时实现抖动幅度和频率参数高可调性,提升了抖动注入的精度,无需增加额外的仪器,降低成本的同时集成度更高。
附图说明
18.图1是本发明一种基于幅度转换时序的高精度数字抖动注入装置原理框图;
19.图2是基于幅度转换时序的数字抖动注入原理图;
20.图3是数据信号抖动注入时序示意图。
具体实施方式
21.下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
22.实施例
23.图1是本发明一种基于幅度转换时序的高精度数字抖动注入装置原理框图。
24.在本实施例中,如图1所示,本发明提供的一种基于幅度转换时序的高精度数字抖动注入装置,包括:可变时钟发生器模块、波形查找表模块、抖动数据查找表模块、调幅计算模块、数据运算模块、数模转换器、低通滤波模块;
25.下面对各个子模块进行详细描述:
26.可变时钟发生器连接地址发生器模块、波形查找表、抖动数据查找表和数模转换器,按照设定的采样频率产生用于控制地址发生器、波形查找表、抖动数据查找表、以及数模转换器的时钟信号。本实施例中,设可变时钟频率为f
s
,若周期波形每个周期由n个采样点构成,则该波形输出频率为:f
o
=1/t
o
=1/nt
s
=f
s
/n;式中t
o
为输出信号波形周期,t
s
为可变时钟周期,输出信号频率取决于可变时钟频率f
s
和每周期波形的采样点数n。
27.地址发生器模块分别连接波形数据查找表和抖动数据查找表;该模块以时钟信号为依据,产生用于波形查找表和抖动数据查找表寻址查找波形样点数据的地址。具体的,在每一个时钟信号的上升沿,地址发生器的输出地址加1,地址发生器的输出地址数据,分别对波形数据查找表和抖动数据查找表进行寻址,逐点读出波形样点数据和抖动样点数据。
28.波形查找表接收来自地址发生器的地址,其内存储有各种原始波形样点数据,用于以地址发生器提供的地址为依据,通过寻址的方式查找出每个地址对应的波形样点数据;
29.波形查找表模块连接数据运算模块,用于接收并存储来自地址发生器的地址,其内存储有原始波形样点数据;以接收的地址为依据,通过寻址的方式查找出每个地址对应的原始波形样点数据。
30.抖动数据查找表模块连接调幅计算模块,用于接收来自地址发生器的地址,其内存储有各种不同类型的抖动样点数据;抖动数据查找表,通过寻址的方式查找出每个地址对应的原始抖动样点数据提供给调幅计算模块。
31.调幅计算模块以设定的时序抖动幅度要求为依据,对来自抖动数据查找表的原始抖动样点数据进行调整,并将调整后的抖动样点数据提供给数据运算模块;
32.数据运算模块连接数模转换器,接收来自波形查找表的波形样点数据和来自调幅计算模块的抖动样点数据。数据运算模块用于对原本波形数据和抖动数据进行运算;并根据不同的抖动注入类型,采用与抖动注入类型相匹配的数据直接幅度相加、或筛选出边沿数据样点再进行幅度修改的方式,得到加抖后的数据信号波形样点数据;
33.数模转换模块连接低通滤波器,用于接收加抖后波形样点数据和时钟信号,并以时钟信号为依据进行数字模拟转换得到模拟信号,然后将转换后的模拟信号送入低通滤波器;本实施例中,数模转换器的采样率为f
s
。
34.低通滤波器lpf连接外部设备,用于对数模转换器输出的模拟信号进行滤波,滤除杂散信号。由于数模转换器的零阶保持特性,其输出的模拟信号包含镜像频率在内的杂散
信号,需要对包含杂散信号的模拟信号进行滤波以提高脉冲信号纯净度。低通滤波器对用户所需脉冲信号带宽外的高次谐波和镜像频率进行滤除得到高分辨率脉冲上升沿可控的脉冲信号。
35.图2是基于幅度转换时序的数字抖动注入原理图。如图2所示,在数据信号波形上升边沿处,数据信号上升边沿电压值到达判决电压的时刻决定数据信号高电平或低电平跳变时刻的判决,通过改变判决电压处的上升沿的电压幅度可以影响判决跳变时刻,当将判决电压处的信号电压幅度增加δa,判决时刻时序就会发生前移δt,同样的当将判决电压处的信号电压幅度减小δa,判决时刻时序就会发生滞后δt;这个时序的偏移量δt还由信号边沿的压摆率sr决定,三者间满足关系:δt=δa/sr,信号边沿压摆率一般可由上升时间tr和边沿的20%~80%或是10%~90%的幅度差确定,在本实施例中,波形信号边沿压摆率由可变时钟发生器的采样率f
s
以及波形数据样点参数确定:
36.sr=δa'/(1/f
s
);
37.式中δa'为波形数据样点的两点间隔幅度差;
38.由此可以确定时序偏移量:
39.δt=δa/[δa'/(1/f
s
)];
[0040]
由于可见,本发明提出的基于幅度转换时序的高精度数字抖动注入装置能实现实现抖动注入类型的任意性。
[0041]
图3是数据信号抖动注入时序示意图。如图3所示,对于原本数据信号的波形数据进行加抖运算后得到加抖数据信号波形,加抖数据波形的上升沿的抖动幅度和抖动时序的前移或是滞后由加抖数据和数据运算规则设定,如图3加抖类型为正弦性抖动,加抖后的数据信号上升边沿时间间隔误差即tie轨迹体现正弦性的特性。
[0042]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。