1.本发明涉及自动化设备技术领域,特别是一种自动化清尘装置。
背景技术:
2.高密度人口的经济及社会活动必然会排放大量细颗粒物,一旦排放超过大气循环能力和承载度,细颗粒物浓度将持续积聚,并堆积在地面上,不仅影响美观,被风吹过后还会飘散。
3.现有的清尘装置在清尘过程往往会将颗粒物扬起,无法将其清洁完全,并且大都是安装在清扫车上,在一些空间狭小和有拐角的地区无法进行清洁。
技术实现要素:
4.根据本发明需要解决的技术问题,本发明提供了一种自动化清尘装置,可通过收集展臂在清尘过程中防止颗粒物扬起,并且还可通过收集展臂进行颗粒物的收集,拐角地区可以调节角度进行清尘。
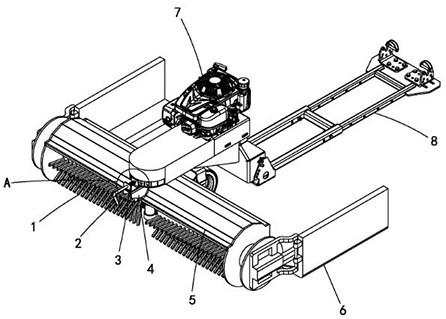
5.为实现上述目的,本发明提供了一种自动化清尘装置,包括发动机,所述发动机固定于传动箱体上平面,所述传动箱体顶端的下方设置有罩壳,所述罩壳内腔中设置有清洁刷,所述清洁刷的转轴与传动箱体之间蜗杆传动,所述罩壳与传动箱体之间连接有水平角度调节装置,所述罩壳两端侧均设置有结构相同的收集展臂,所述传动箱体尾端与牵引部连接,所述收集展臂包括连接盘、伸缩电缸、固定臂、展臂板和连接座,所述连接盘固定在罩壳侧端的旋转电缸旋转轴上,所述连接盘另一面固定有固定臂,所述固定臂一端与展臂板一端活动连接,所述固定臂中部设置有伸缩电缸,所述伸缩电缸伸缩端与展臂板内壁上的连接座连接。
6.本发明在一较佳实施方式中可进一步配置为,所述传动箱体内部两端分别固定有驱动轮和从动轮,所述驱动轮和从动轮通过皮带传动,所述驱动轮与顶部发动机输出轴连接,所述从动轮中心固定有蜗杆,所述蜗杆与下方旋转轴上的涡轮啮合。
7.本发明在一较佳实施方式中可进一步配置为,所述驱动轮和从动轮之间固定有轴套,所述轴套内套有轮叉,所述轮叉的转轴上位于轮叉梁臂与传动箱体下平面之间设置有弹簧,所述轮叉的叉臂之间固定有支撑轮。
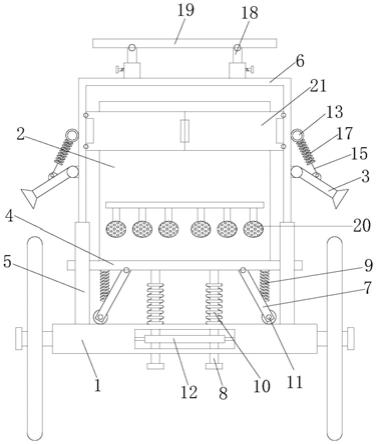
8.本发明在一较佳实施方式中可进一步配置为,所述水平角度调节装置包括拉杆、支撑块、连接块和调节口,所述调节口固定于传动箱体的顶部,所述连接块底部与罩壳固定,顶部与传动箱体下平面相抵,所述连接块顶面固定有支撑块,所述支撑块其中一端与调节口相抵,所述支撑块穿接有拉杆,所述拉杆靠近传动箱体一端处设置有挡柱,所述拉杆杆体上位于挡柱与支撑块另一端之间设置有弹簧。
9.本发明在一较佳实施方式中可进一步配置为,所述调节口由若干个带腰孔的矩形块围成。
10.本发明在一较佳实施方式中可进一步配置为,所述展臂板靠近内部的端头部固定
有三角封板。
11.本发明在一较佳实施方式中可进一步配置为,所述牵引部包括调节板、固定架、调节架和连接架,所述调节板顶部与传动箱体的支座相接,底部固定于固定架上,所述调节架的两插臂插于固定架的两架管内,所述调节架的另一端固定有连接架。
12.有益效果:本发明的自动化清尘装置,在清洁刷进行滚动过程中,收集展臂与清洁刷呈垂直状态,可以防止颗粒物扬起;需要收集时,收集展臂与清洁刷呈平行状态,颗粒物通过清洁刷直接进入收集展臂内,展臂伸展后整体转动,将颗粒物倒出;拐角处可通过水平角度调节装置调节以适应拐角。
附图说明
13.下面结合附图和具体实施方式对本发明作进一步详细的说明。
14.图1为本发明整体结构示意图。
15.图2为本发明收集展臂结构示意图。
16.图3为本发明旋转电缸示意图。
17.图4为本发明调节口以及牵引部示意图。
18.图5为本发明的a部放大示意图。
19.图中:1为清洁刷;2为拉杆;3为支撑块;4为连接块;5为罩壳;6为收集展臂;7为发动机;8为牵引部;9为连接盘;10为伸缩电缸;11为固定臂;12为展臂板;13为连接座;14为旋转电缸;15为调节口;16为支撑轮;17为调节板;18为固定架;19为调节架;20为连接架;21为挡柱。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护范围。
21.如图1
‑
5所示,一种自动化清尘装置,包括发动机7,所述发动机7固定于传动箱体上平面,所述传动箱体顶端的下方设置有罩壳5,所述罩壳5内腔中设置有清洁刷1,所述清洁刷1的转轴与传动箱体之间蜗杆传动,所述罩壳5与传动箱体之间连接有水平角度调节装置,所述罩壳5两端侧均设置有结构相同的收集展臂6,所述传动箱体尾端与牵引部8连接,所述收集展臂6包括连接盘9、伸缩电缸10、固定臂11、展臂板12和连接座13,所述连接盘9固定在罩壳5侧端的旋转电缸14旋转轴上,所述连接盘9另一面固定有固定臂11,所述固定臂11一端与展臂板12一端活动连接,所述固定臂11中部设置有伸缩电缸10,所述伸缩电缸10伸缩端与展臂板12内壁上的连接座13连接。在收集展臂6的作用下,不仅在清洁刷1滚动过程中可以防止颗粒物扬起,还能起到收集作用;根据不同环境调节清尘部分与传动箱体之间的角度;牵引部8则可以搭载任意适用的行驶工具。
22.在其中一个实施例中,如图1和图4所示,所述传动箱体内部两端分别固定有驱动轮和从动轮,所述驱动轮和从动轮通过皮带传动,所述驱动轮与顶部发动机7输出轴连接,所述从动轮中心固定有蜗杆,所述蜗杆与下方旋转轴上的涡轮啮合,所述驱动轮和从动轮
之间固定有轴套,所述轴套内套有轮叉,所述轮叉的转轴上位于轮叉梁臂与传动箱体下平面之间设置有弹簧,所述轮叉的叉臂之间固定有支撑轮16。通过轮叉固定的支撑轮16转向更加灵敏,也更加容易操控。
23.在其中一个实施例中,如图1、图4和图5所示,所述水平角度调节装置包括拉杆2、支撑块3、连接块4和调节口15,所述调节口15固定于传动箱体的顶部,所述连接块4底部与罩壳5固定,顶部与传动箱体下平面相抵,所述连接块4顶面固定有支撑块3,所述支撑块3其中一端与调节口15相抵,所述支撑块3穿接有拉杆2,所述拉杆2靠近传动箱体一端处设置有挡柱21,所述拉杆2杆体上位于挡柱21与支撑块3另一端之间设置有弹簧,所述调节口15由若干个带腰孔的矩形块围成。通过将拉杆2抽出并转动,对准所需的矩形块后松开拉杆2,从而改变角度。
24.在其中一个实施例中,如图2所示,所述展臂板12靠近内部的端头部固定有三角封板。设置成三角封板可以防止颗粒物漏出。
25.在其中一个实施例中,如图4所示,所述牵引部8包括调节板17、固定架18、调节架19和连接架20,所述调节板17顶部与传动箱体的支座相接,底部固定于固定架18上,所述调节架19的两插臂插于固定架18的两架管内,所述调节架19的另一端固定有连接架20。调节板17可以调节固定架18与传动箱体的角度,调节架19可根据情况调节插入固定架18的深度,便于与不同牵引车连接。
26.工作原理:首先通过调节板17将固定架18与传动箱体之间的角度调节至合适位置,再将调节架19插入固定架18的深度调节至合适深度,再将连接架20与牵引机相连,启动发动机7,发动机7输出轴带动驱动轮,驱动轮通过皮带带动从动轮转动,随之从动轮内的蜗杆转动,清洁刷1内的转轴中心处的涡轮与蜗杆啮合,转轴随之转动,转轴外部的清洁刷1也开始转动,清洁刷1工作时,两侧的展臂板12相互平行,在清洁时防止颗粒物向四周扬起,清扫结束时两侧的展臂板12向内折,清洁刷1转动时就会将颗粒物扫至展臂板12上,颗粒物全部位于展臂板12上时,展臂板12重新展开呈之前的状态,然后旋转电缸14带动整个收集展臂6转动,将展臂板12与地面形成角度,使得颗粒物向地处滑落,进而完成收集。
27.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体与另一个实体区分开来,而不一定要求或者暗示这些实体存在任何这种实际的关系或者顺序。
28.以上举例仅仅是对本发明的举例说明,并不构成对本发明的保护范围的限制,凡是与本发明相同或相似的设计均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。