1.本实用新型涉及焊接工装的技术领域,具体为基于机器视觉的去应力焊接工装。
背景技术:
2.现有的产品通过焊接工位进行焊接后,需要将产品从焊接工位的焊接平台上取下,之后转运到检测工位进行焊缝检测,焊缝检测完成后,需要通过高频振荡器对产品进行去应力处理,在这个过程中产品需要转运到至少三个工位,其使得整个生产周期复杂,生产成本高;为此,急需一款能够快速进行焊缝检测和应力去除的焊接工装。
技术实现要素:
3.针对上述问题,本实用新型提供了基于机器视觉的去应力焊接工装,其在焊接平台的上部区域布置摄像机实时检测焊缝,且在焊接平台的上部设置高频振荡器,使得去应力快速可靠进行,缩短了产品的生产周期、降低了生产成本。
4.基于机器视觉的去应力焊接工装,其特征在于:其包括底座,所述底座的中心位置设置有回转台,所述回转台的上部转轴输出端连接有焊接平台,所述焊接平台用于产品焊接,所述底座的一侧设置有第一立式支架,所述第一立式支架的底部固装于所述底座的一侧上表面,所述第一立式支架的高度方向设置有升降气缸,第一水平气缸的缸座固装于升降气缸的上部输出端,所述第一水平气缸的伸缩杆的内端固装有高频振荡器,所述高频振荡器布置于所述焊接平台的正上方的一侧位置布置,所述底座的另一侧固设第二立式支架,所述第二立式支架的上部固设有第二水平支架,所述第二水平支架的内端上部固装有摄像机,所述摄像机的镜头朝向焊接平台的上表面布置,所述摄像机通过数据传输连接外部的电脑。
5.其进一步特征在于:
6.所述焊接平台的上部还环设有若干夹爪,所述夹爪用于夹持定位产品,所述焊接平台的外周设置有焊机,所述焊机的焊枪用于产品的焊接;
7.所述底座的上表面对应于所述伸缩杆的下部位置布置有控制装置,所述控制装置用于控制焊接平台是否旋转、摄像机拍摄、高频振荡器的启闭;
8.所述底座的底部四周设置有若干下凸的支撑脚,确保整个结构稳固可靠;
9.所述第二水平支架的内端还设置有水平布置的前凸透明玻璃板,所述摄像机的镜头位于前凸透明玻璃板的正上方,所述摄像机的镜头透过前凸透明玻璃板朝向焊接平台的上表面布置,确保镜头不会被溅起的焊渣破坏;
10.所述前凸透明玻璃板插装于第二水平支架的内凹插装槽,确保前凸透明玻璃板可方便更换。
11.采用本实用新型后,焊接平台上的产品通过焊接进行焊接时,摄像机捕捉焊缝进行拍摄图片,之后将图片通过有线传输或无线传输的方式传送至外部的电脑,电脑通过人工实时识别或内置比对软件和标准焊缝识别,实时进行焊缝检测,焊接合格后且检测合格
状态下,驱动升降气缸、第一水平气缸调整高频振荡器的位置,使得高频振荡器用于产品的应力去除,应力去除后的产品脱离焊接平台,其在焊接平台的上部区域布置摄像机实时检测焊缝,且在焊接平台的上部设置高频振荡器,使得去应力快速可靠进行,缩短了产品的生产周期、降低了生产成本。
附图说明
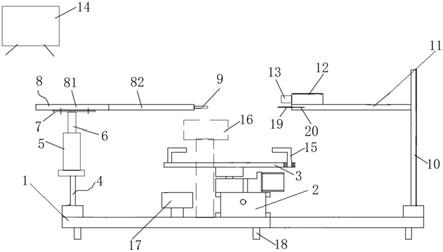
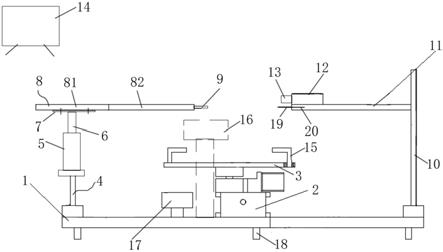
12.图1为本实用新型的主视图结构示意图;
13.图中序号所对应的名称如下:
14.底座1、回转台2、焊接平台3、第一立式支架4、升降气缸5、上部输出端6、连接盘7、第一水平气缸8、缸座81、伸缩杆82、高频振荡器9、第二立式支架10、第二水平支架11、摄像机12、镜头13、电脑14、夹爪15、焊机16、控制装置17、支撑脚18、前凸透明玻璃板19、内凹插装槽20。
具体实施方式
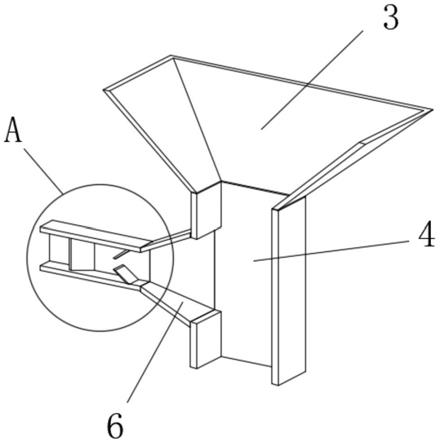
15.基于机器视觉的去应力焊接工装,见图1:其包括底座1,底座1的中心位置设置有回转台2,回转台2的上部转轴输出端连接有焊接平台3,焊接平台3用于产品焊接,底座1的一侧设置有第一立式支架4,第一立式支架4的底部固装于底座1的一侧上表面,第一立式支架4的高度方向设置有升降气缸5,升降气缸5的上部输出端6固设有连接盘7,连接盘7固接第一水平气缸8的缸座81;
16.第一水平气缸8的伸缩杆82的内端固装有高频振荡器9,高频振荡器9布置于焊接平3台的正上方的一侧位置布置,底座1的另一侧固设第二立式支架10,第二立式支架10的上部固设有第二水平支架11,第二水平支架11的内端上部固装有摄像机12,摄像机12的镜头13朝向焊接平台3的上表面布置,摄像机12通过数据传输连接外部的电脑14。
17.焊接平台3的上部还环设有若干夹爪15,夹爪15用于夹持定位产品,焊接平台3的外周设置有焊机16,焊机16的焊枪用于产品的焊接;
18.底座1的上表面对应于伸缩杆82的下部位置布置有控制装置17,控制装置17用于控制焊接平台3是否旋转、摄像机12拍摄、高频振荡器9的启闭;
19.底座1的底部四周设置有若干下凸的支撑脚18,确保整个结构稳固可靠;
20.第二水平支架11的内端还设置有水平布置的前凸透明玻璃板19,摄像机12的镜头13位于前凸透明玻璃板19的正上方,摄像机12的镜头13透过前凸透明玻璃板19朝向焊接平台3的上表面布置,确保镜头不会被溅起的焊渣破坏;
21.前凸透明玻璃板19插装于第二水平支架11的内凹插装槽20,确保前凸透明玻璃板19可方便更换。
22.其工作原理如下:焊接平台上的产品通过焊接进行焊接时,摄像机捕捉焊缝进行拍摄图片,之后将图片通过有线传输或无线传输的方式传送至外部的电脑,电脑通过人工实时识别或内置比对软件和标准焊缝识别,实时进行焊缝检测,焊接合格后且检测合格状态下,驱动升降气缸、第一水平气缸调整高频振荡器的位置,使得高频振荡器用于产品的应力去除,应力去除后的产品脱离焊接平台,其在焊接平台的上部区域布置摄像机实时检测焊缝,且在焊接平台的上部设置高频振荡器,使得去应力快速可靠进行,缩短了产品的生产
周期、降低了生产成本。
23.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
24.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
技术特征:
1.基于机器视觉的去应力焊接工装,其特征在于:其包括底座,所述底座的中心位置设置有回转台,所述回转台的上部转轴输出端连接有焊接平台,所述焊接平台用于产品焊接,所述底座的一侧设置有第一立式支架,所述第一立式支架的底部固装于所述底座的一侧上表面,所述第一立式支架的高度方向设置有升降气缸,第一水平气缸的缸座固装于升降气缸的上部输出端,所述第一水平气缸的伸缩杆的内端固装有高频振荡器,所述高频振荡器布置于所述焊接平台的正上方的一侧位置布置,所述底座的另一侧固设第二立式支架,所述第二立式支架的上部固设有第二水平支架,所述第二水平支架的内端上部固装有摄像机,所述摄像机的镜头朝向焊接平台的上表面布置,所述摄像机通过数据传输连接外部的电脑。2.如权利要求1所述的基于机器视觉的去应力焊接工装,其特征在于:所述焊接平台的上部还环设有若干夹爪,所述夹爪用于夹持定位产品,所述焊接平台的外周设置有焊机,所述焊机的焊枪用于产品的焊接。3.如权利要求1所述的基于机器视觉的去应力焊接工装,其特征在于:所述底座的上表面对应于所述伸缩杆的下部位置布置有控制装置,所述控制装置用于控制焊接平台是否旋转、摄像机拍摄、高频振荡器的启闭。4.如权利要求1所述的基于机器视觉的去应力焊接工装,其特征在于:所述底座的底部四周设置有若干下凸的支撑脚。5.如权利要求1所述的基于机器视觉的去应力焊接工装,其特征在于:所述第二水平支架的内端还设置有水平布置的前凸透明玻璃板,所述摄像机的镜头位于前凸透明玻璃板的正上方,所述摄像机的镜头透过前凸透明玻璃板朝向焊接平台的上表面布置。6.如权利要求5所述的基于机器视觉的去应力焊接工装,其特征在于:所述前凸透明玻璃板插装于第二水平支架的内凹插装槽。
技术总结
本实用新型提供了基于机器视觉的去应力焊接工装,其缩短了产品的生产周期、降低了生产成本。底座的中心位置设置有回转台,回转台的上部转轴输出端连接有焊接平台,焊接平台用于产品焊接,底座的一侧设置有第一立式支架,第一立式支架的底部固装于底座的一侧上表面,第一立式支架的高度方向设置有升降气缸,第一水平气缸的缸座固装于升降气缸的上部输出端,第一水平气缸的伸缩杆的内端固装有高频振荡器,高频振荡器布置于焊接平台的正上方的一侧位置布置,底座的另一侧固设第二立式支架,第二立式支架的上部固设有第二水平支架,第二水平支架的内端上部固装有摄像机,摄像机的镜头朝向焊接平台的上表面布置,摄像机通过数据传输连接外部的电脑。输连接外部的电脑。输连接外部的电脑。
技术研发人员:沈海玉 顾万建 黄林涛 吴鹏飞
受保护的技术使用者:江苏金环科技有限公司
技术研发日:2021.04.02
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。