技术特征:
1.一种双臂机器人控制方法,其特征在于,所述方法包括:在双臂机器人夹持负载时,将双臂末端的六维力转换至负载坐标系下,所述负载坐标系为以所述负载的中心为原点建立的坐标系;根据所述负载坐标系下的各个末端的六维力确定各个末端对应的内力、外力和外力矩,所述各个末端对应的内力用于夹持负载,所述各个末端对应的外力和外力矩用于控制所述双臂机器人夹持负载跟随所述外力和外力矩运动;根据所述负载坐标系下的各个末端对应的内力、外力和外力矩控制所述双臂机器人的双臂做协同运动。2.根据权利要求1所述的双臂机器人控制方法,其特征在于,所述将双臂末端的六维力转换至负载坐标系下,包括:根据所述负载坐标系和第一末端坐标系之间的第一坐标系旋转矩阵将第一末端的六维力转换至所述负载坐标系下;根据所述负载坐标系和第二末端坐标系之间的第二坐标系旋转矩阵将第二末端的六维力转换至所述负载坐标系下。3.根据权利要求1所述的双臂机器人控制方法,其特征在于,所述根据所述负载坐标系下的各个末端对应的内力、外力和外力矩控制所述双臂机器人的双臂做协同运动,包括:根据第一末端对应的内力确定第一末端坐标系下的所述第一末端的第一内力控制调整量和第二末端坐标系下的第二末端的第二内力控制调整量;根据所述第一末端对应的外力确定所述第一末端坐标系下的第一外力控制调整量和所述第二末端坐标系下的第二外力控制调整量;根据所述第一末端对应的外力矩确定所述第一末端坐标系下的第一位姿调整量和所述第二末端坐标系下的第二位姿调整量;根据所述第一内力控制调整量、所述第一外力控制调整量和所述第一位姿调整量控制所述双臂机器人的第一机械臂,同时根据所述第二内力控制调整量、所述第二外力控制调整量和所述第二位姿调整量控制所述双臂机器人的第二机械臂。4.根据权利要求3所述的双臂机器人控制方法,其特征在于,所述根据所述第一末端对应的内力确定第一末端坐标系下的所述第一末端的第一内力控制调整量和第二末端坐标系下的第二末端的第二内力控制调整量,包括:根据所述第一末端对应的内力确定所述负载坐标系下的第一内力调整量;根据所述第一内力调整量确定所述负载坐标系下的所述第二末端的第二内力调整量;根据所述负载坐标系和第一末端坐标系之间的第一坐标系旋转矩阵确定所述第一内力调整量在所述第一末端坐标系下的第一内力控制调整量;根据所述负载坐标系和第二末端坐标系之间的第二坐标系旋转矩阵确定所述第二内力调整量在所述第二末端坐标系下的第二内力控制调整量。5.根据权利要求3所述的双臂机器人控制方法,其特征在于,所述根据所述第一末端对应的外力确定所述第一末端坐标系下的第一外力控制调整量和所述第二末端坐标系下的第二外力控制调整量,包括:根据所述第一末端对应的外力确定所述负载坐标系下的第一外力调整量;根据所述第一外力调整量确定所述负载坐标系下的所述第二末端的第二外力调整量;
根据所述负载坐标系和第一末端坐标系之间的第一坐标系旋转矩阵确定所述第一外力调整量在所述第一末端坐标系下的第一外力控制调整量;根据所述负载坐标系和第二末端坐标系之间的第二坐标系旋转矩阵确定所述第二外力调整量在所述第二末端坐标系下的第二外力控制调整量。6.根据权利要求3所述的双臂机器人控制方法,其特征在于,所述第一位姿调整量包括所述第一末端坐标系下的第一角度调整量和第一位置调整量,第二位姿调整量包括所述第二末端坐标系下的第二角度调整量和第二位置调整量,所述根据所述第一末端对应的外力矩确定所述第一末端坐标系下的第一位姿调整量和所述第二末端坐标系下的第二位姿调整量,包括:根据所述第一末端对应的外力矩确定负载角度变化量;根据所述负载角度变化量确定姿态旋转矩阵;确定第一末端坐标系原点和第二末端坐标系原点之间的距离;根据所述距离确定所述第一末端坐标系原点在所述负载坐标系下的第一位置坐标;根据所述距离确定所述第二末端坐标系原点在所述负载坐标系下的第二位置坐标;根据所述负载角度变化量、所述第一位置坐标和所述姿态旋转矩阵确定所述第一末端坐标系下的所述第一角度调整量和所述第一位置调整量;根据所述负载角度变化量、所述第二位置坐标和所述姿态旋转矩阵确定所述第二末端坐标系下的所述第二角度调整量和所述第二位置调整量。7.根据权利要求6所述的双臂机器人控制方法,其特征在于,所述根据所述负载角度变化量、所述第一位置坐标和所述姿态旋转矩阵确定所述第一末端坐标系下的所述第一角度调整量和所述第一位置调整量,包括:根据所述负载坐标系和第一末端坐标系之间的第一坐标系旋转矩阵确定所述负载角度变化量在所述第一末端坐标系下的所述第一角度调整量;根据所述姿态旋转矩阵预测所述第一位置坐标对应的姿态调整后的第一预测位置坐标;根据所述第一预测位置坐标和所述第一位置坐标确定第一末端位置变化量;根据所述第一坐标系旋转矩阵确定所述第一末端位置变化量在所述第一末端坐标系下的所述第一位置调整量。8.根据权利要求6所述的双臂机器人控制方法,其特征在于,所述根据所述负载角度变化量、所述第二位置坐标和所述姿态旋转矩阵确定所述第二末端坐标系下的所述第二角度调整量和所述第二位置调整量,包括:根据所述负载坐标系和第二末端坐标系之间的第二坐标系旋转矩阵确定所述负载角度变化量在所述第二末端坐标系下的所述第二角度调整量;根据所述姿态旋转矩阵预测所述第二位置坐标对应的姿态调整后的第二预测位置坐标;根据所述第二预测位置坐标和所述第二位置坐标确定第二末端位置变化量;根据所述第二坐标系旋转矩阵确定所述第二末端位置变化量在所述第二末端坐标系下的所述第二位置调整量。9.一种双臂机器人控制装置,其特征在于,所述装置包括:
坐标系转换模块,用于在双臂机器人夹持负载时,将双臂末端的六维力转换至负载坐标系下,所述负载坐标系为以所述负载的中心为原点建立的坐标系;内外力确定模块,用于根据所述负载坐标系下的各个末端的六维力确定各个末端对应的内力、外力和外力矩,所述各个末端对应的内力用于夹持负载,所述各个末端对应的外力和外力矩用于控制所述双臂机器人夹持负载跟随所述外力和外力矩运动;协同控制模块,用于根据所述负载坐标系下的各个末端对应的内力、外力和外力矩控制所述双臂机器人的双臂做协同运动。10.一种双臂机器人,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序在所述处理器上运行时执行权利要求1至8任一项所述的双臂机器人控制方法。11.一种可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上运行时执行权利要求1至8任一项所述的双臂机器人控制方法。
技术总结
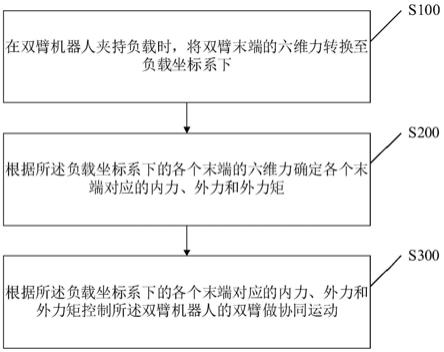
本申请公开一种双臂机器人控制方法、装置、双臂机器人和可读存储介质,在双臂机器人夹持负载时,将双臂机器人的各个末端的六维力转换至负载坐标系下,负载坐标系为以所述负载的中心为原点建立的坐标系;根据负载坐标系下的各个末端的六维力确定各个末端对应的内力、外力和外力矩,各个末端对应的内力用于夹持负载,所述各个末端对应的外力和外力矩用于控制所述双臂机器人夹持负载跟随所述外力和外力矩运动;根据所述负载坐标系下的各个末端对应的内力、外力和外力矩控制所述双臂机器人的双臂做协同运动。本申请所有计算在同一坐标系下进行,可以降低计算过程的复杂性,提高计算速度,进而提高双臂协同工作的协同性,有效降低负载跌落的风险。负载跌落的风险。负载跌落的风险。
技术研发人员:曾献文 刘益彰 张美辉 熊友军
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:2021.08.25
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。