1.本发明涉及自动控制领域,尤其涉及一种控制方法、控制装置、可移动平台、遥控终端、控制系统以及计算机存储介质。
背景技术:
2.可移动平台的使用过程中,为了保障使用安全,通常设有禁止进入区、限制进入区等安全策略限制可移动平台的移动范围。安全策略可以是二维的,也可以是三维的。以无人飞行器为例,其安全策略主要根据国家空域飞行许可区域制定,主要手段为设定禁飞区域与限制飞行高度。
3.穿越机是无人飞行器的一种,与航拍机相比,穿越机飞行速度快、可完成如翻滚等高难度的飞行姿态。用户在使用穿越机时由于操控难度高等问题,很容易出现飞丢的情况。上述的安全策略并不能保证避免穿越机飞丢的情况。竞速车是无人车的一种,也具有速度快、可完成如急转弯、爬陡坡等高难度的行驶模式。此外,尽管在穿越机、竞速车等可移动平台的使用过程中可通过布置保护网等物理围栏实现安全保护策略,但物理围栏成本高昂,通常只用于竞技比赛中,一般用户无法自行设置。因此在现有技术中,并不存在一种一般用户也能使用的可移动平台安全保护策略。
技术实现要素:
4.本发明提供了一种控制方法、装置、可移动平台、遥控终端、控制系统以及计算机存储介质,适用于一般可移动平台用户,且可有效避免可移动平台超越运动范围。
5.为了达到上述技术效果,本发明实施例公开了如下技术方案:
6.第一方面,提供了一种控制方法,用于控制可移动平台,包括:
7.获取指示运动范围的信息;
8.获取所述可移动平台的实时刹车距离;
9.若所述可移动平台在所述运动范围内的实时刹车距离大于所述可移动平台的实时位置在运动方向上与所述运动范围的边界的距离,则接管所述可移动平台。
10.第二方面,提供了一种控制装置,用于控制可移动平台,包括:
11.处理器;
12.用于存储处理器可执行指令的存储器;
13.所述处理器被配置为:
14.获取指示运动范围的信息;
15.获取所述可移动平台的实时刹车距离;
16.若所述可移动平台在所述运动范围内的实时刹车距离大于所述可移动平台的实时位置在运动方向上与所述运动范围的边界的距离,则接管所述可移动平台。
17.第三方面,提供了一种可移动平台,包括:
18.机体;
19.动力装置;
20.控制装置,所述控制装置包括:
21.处理器;
22.用于存储处理器可执行指令的存储器;
23.所述处理器被配置为:
24.获取指示运动范围的信息;
25.获取所述可移动平台的实时刹车距离;
26.若所述可移动平台在所述运动范围内的实时刹车距离大于所述可移动平台的实时位置在运动方向上与所述运动范围的边界的距离,则接管所述可移动平台。
27.第四方面,提供了一种遥控终端,与可移动平台通信连接,用于控制所述可移动平台,包括:
28.输入设备,用于设定运动范围;
29.控制装置,所述控制装置包括:
30.处理器;
31.用于存储处理器可执行指令的存储器;
32.所述处理器被配置为:
33.获取指示运动范围的信息;
34.获取所述可移动平台的实时刹车距离;
35.若所述可移动平台在所述运动范围内的实时刹车距离大于所述可移动平台的实时位置在运动方向上与所述运动范围的边界的距离,则接管所述可移动平台。
36.第五方面,提供了一种控制系统,包括可移动平台,与所述可移动平台通信连接的遥控终端;
37.所述遥控终端用于生成指示飞行范围的信息;
38.所述可移动平台包括:
39.处理器;
40.用于存储处理器可执行指令的存储器;
41.所述处理器被配置为执行上述实施例所述的方法。
42.第六方面,提供了一种计算机存储介质,其上存储有计算机程序,所述计算机程序被执行时实现上述实施例所述的方法。
43.本发明提供的用于控制可移动平台的控制方法,通过实时跟踪计算可移动平台的刹车距离,并在确定刹车后可移动平台将越出预设的运动范围时,则接管控制可移动平台。通过以上的方法,可以有效控制可移动平台在所限定的范围内运动,避免出现可移动平台失控、失联继而丢失的情况,保障了可移动平台的运动安全。
附图说明
44.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
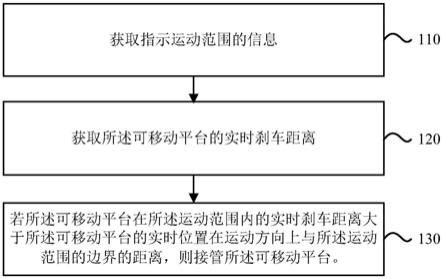
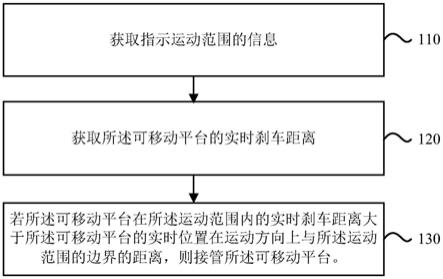
45.图1是本发明根据一示例性实施例示出的一种控制方法。
46.图2是本发明提供的运动范围部分设定界面示意图。
47.图3是本发明根据另一示例性实施例示出的一种控制方法。
48.图4是本发明根据另一示例性实施例示出的一种控制方法。
49.图5是本发明根据另一示例性实施例示出的一种控制方法。
50.图6是本发明根据另一示例性实施例示出的一种控制方法。
51.图7是本发明提供的控制装置的结构示意图。
52.图8是本发明提供的可移动平台的结构示意图。
53.图9是本发明提供的遥控终端的结构示意图。
54.图10是本发明提供的控制系统的结构示意图。
具体实施方式
55.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
56.本发明提供的一种控制方法,用于控制可移动平台,所述可移动平台包括但不仅限于无人飞行器、无人车、无人船等。其中无人飞行器包括但不仅限于航拍机以及穿越机。对于可移动平台的用户,特别是刚接触的新手用户,可能由于操作不熟悉导致操作失误,或因可移动平台运动速度过快导致可移动平台丢失遥控信号等主观与客观的因素,都会无法保障可移动平台的安全运动。尤其对于飞行速度快、可完成如翻滚等高难度飞行姿态的穿越机,更是容易出现飞丢的情况。为了保障可移动平台的安全运动,本发明提供了一种可移动平台的控制方法,具体实现方式如下:
57.参见图1,为本发明所提供的一种控制方法,该方法可以由可移动平台执行,作为例子,所述可移动平台中装载有可执行该控制方法的处理器或处理芯片。该控制方法还可以由控制可移动平台的遥控终端执行,所述遥控终端可以是遥控器;可以是可运行具有遥控功能的虚拟界面的终端设备,例如移动终端(手机、ipad、平板、笔记本等)、固定终端(台式电脑),还可以是移动终端和遥控器通过电连接或无线连接的组合。所述遥控终端装载有执行该控制方法的处理器或处理芯片。
58.如图1所示,包括以下步骤:
59.步骤110:获取指示运动范围的信息;
60.步骤120:获取所述可移动平台的实时刹车距离;
61.步骤130:若所述可移动平台在所述运动范围内的实时刹车距离大于所述可移动平台的实时位置在运动方向上与所述运动范围的边界的距离,则接管所述可移动平台。
62.步骤110中的运动范围,即仅允许可移动平台在该范围内运动,禁止越过该范围。步骤120中的实时刹车距离可基于可移动平台的运动参数信息确定。当可移动平台的实时刹车距离大于其与运动范围边界的距离,即可移动平台刹车后会越出所述运动范围,则接管所述可移动平台。
63.本发明提供的用于控制可移动平台的控制方法,通过实时跟踪计算可移动平台的
刹车距离,当刹车后可移动平台会越出预设的运动范围,则接管控制可移动平台。通过以上的方法,可以有效控制可移动平台在所限定的范围内运动,避免出现可移动平台失控、失联继而丢失的情况,保障了可移动平台的运动安全。
64.参见图2,为可移动平台运动范围的部分设定界面。用户可在控制可移动平台的遥控终端,如遥控器中,手动设定运动范围。具体地,通过可移动平台或遥控器上所装载的定位模块,如gps模块,确定当前所处位置,并在遥控器上加载显示包含当前所处位置的一定范围的区域地图,当然,也可以结合可移动平台和定位模块一起来确定当前所处位置。所述区域地图可以是已存储在本地的地图,也可以是即时联网获取的地图。所属领域技术人员可根据实际需求获取,本发明在此不作限制。
65.用户可在遥控器屏幕上显示的区域地图中手动设定运动范围,也可以由遥控器基于地图中地形信息确定运动范围。如在图2所示的部分设定界面中,所显示的区域地图的右上角显示了山丘a的地形信息,为了避免可移动平台在运动时与山丘a相撞,遥控器可以将该区域排除在运动范围以外。作为例子,如果用户手动设定运动范围时,忽略了该地形信息,把山丘a加入了运动范围内,遥控器也可以对用户进行提示。当可移动平台为无人飞行器或无人船时,遥控器还可以基于国家划定的禁飞区或禁航区确定运动范围。设定的运动范围如图2所示,运动范围的边界可以是任意规则或不规则形状,并不仅限于图2的矩形边界。
66.一个例子中,在设定好运动范围后,可移动平台开始运动前,还包括如图3的步骤,包括:
67.步骤310:获取指示运动范围的信息;
68.步骤320:检查是否接收到gps信号,可移动平台当前位置是否在所述运动范围中;若是则执行步骤330,若否则返回步骤310。
69.若接收不到gps信号,或可移动平台当前位置在运动范围以外,则不允许开始运动,需要由用户调整运动范围,使可移动平台进入运动范围内,或将可移动平台移动至运动范围内且gps信号较强的位置。
70.步骤330:记录所述当前位置,并设定为返航点。
71.若gps信号良好且可移动平台在运动范围内,则将可移动平台的当前位置设定为返航点。
72.当可移动平台在所述运动范围中开始运动后,如无人飞行器起飞后、无人船起航后、无人车开始驾驶后,执行步骤120:获取所述可移动平台的实时刹车距离。具体地,所述实时刹车距离基于但不仅限于实时速度信息、或预设刹车时间、或预设加速度等至少其中一个确定。例如,用户可以预设一个刹车时间t0,以使可移动平台在所述预设刹车时间t0内完成刹车,则所述实时刹车距离s可根据公式计算得出,其中,v为可移动平台的实时速度。所述预设刹车时间还可以由可移动平台出厂时设置为默认值。再例如,用户可以预设一个加速度a0作为刹车加速度,规定可移动平台在所述预设加速度a0下进行刹车。则所述实时刹车距离s可以根据公式计算得出。
73.其中,上述可移动平台的实时速度可以基于但不仅限于定位系统测量的数据、所
检测的可移动平台的电机转速和/或运动姿态数据、所述遥控终端上控件的变化量、可移动平台的视觉传感器所测数据等,至少一种数据确定得出。
74.此外,当所述可移动平台为无人飞行器,或可移动平台处于飞行状态时,所述实时刹车距离包括竖直方向实时刹车距离和水平方向实时刹车距离的至少一个;所述竖直方向实时刹车距离至少部分地基于重力加速度、预设刹车时间和预设加速度中的至少一个确定。具体地,在飞行状态下,可移动平台的运动可分解为水平方向运动与竖直方向运动。实时刹车距离也包括水平方向实时刹车距离和竖直方向实时刹车距离的至少一个。所述水平方向实时刹车距离的获取如上所述。当所述可移动平台在竖直方向上刹车时,除了考虑可移动平台本身的刹车加速度,还要考虑重力加速度对刹车过程的影响。实际上,可移动平台的竖直方向上的刹车加速度,是可移动平台本身的刹车加速度在竖直方向上的分量与重力加速度之和,而竖直方向实时刹车距离至少部分地基于重力加速度、预设刹车时间和预设加速度中的至少一个确定,其与水平方向上实时刹车距离的计算原理类似,区别仅在于加速度中还需要考量重力加速度,因此依旧可以参考上述水平方向上实时刹车距离的计算方式。
75.作为一个例子,本发明提供的一种控制方法,还可以包括如图4的步骤,包括:
76.步骤410:基于所述可移动平台在所述运动范围内的实时运动信息确定预设反应时间后所述可移动平台的预测位置。
77.例如,可基于所述可移动平台的实时速度、加速度以及预设反应时间中的至少一个得到所述预设反应时间内所述可移动平台的运动轨迹,所述预设反应时间可以包括用户的反应时间,例如用户发现需要介入操作时到实际介入操作之间的时间,或收到预警提示时到实际介入操作之间的时间,或是其他情况下的用户开始操作前的反应时间。预设反应时间可以是用户自行设置,也可以是可移动平台出厂时设置的默认值。对于新手用户,可以设置一个长反应时间,对于操作熟练的用户,可以设置一个短反应时间。如所述预设反应时间为t0,所述可移动平台的实时速度为v,加速度为a,则可通过计算出在所述反应时间内,可移动平台的运动轨迹。再结合所述可移动平台的当前位置以及运动方向,可预测在预设反应时间后,所述可移动平台的位置。通过为可移动平台配置预设反应时间,可以进一步避免可移动平台超越运动范围,为用户预留充足的操作时间以保障使用安全并享受使用乐趣,也能更好地适配各种可移动平台用户的需求。
78.步骤420:所述预测位置是否在所述运动范围内。
79.若是,则执行步骤430a,若否,则执行步骤430b。
80.步骤430a:获取所述可移动平台的实时刹车距离。
81.获取实时刹车距离的具体实现方式如前面实施例所述,在此不再赘述。
82.步骤430b:接管所述可移动平台。
83.在上述优选方案中,结合考虑了用户的反应时间,判断是否要提前接管可移动平台。所述反应时间是指用户从发现情况到采取措施制动刹车之间所需要的时间,如用户从发现可移动平台与建筑物即将发生碰撞,到采取制动刹车之间,可能需要0.5秒到2秒的时间。在这段反应时间内,可移动平台仍以当前的速度、加速度在当前方向上运动。若预测到在所述反应时间后,可移动平台已经越出所述运动范围,则提前接管所述可移动平台,无需
再执行步骤120计算实时刹车距离。只有在满足经过预设反应时间后,所述可移动平台依然在所述运动范围内的前提下,再通过实时刹车距离判断是否需要接管所述可移动平台。通过上述优选方案,可更有效地保障可移动平台在所述运动范围中运动。
84.当可移动平台的实时刹车距离大于其与运动范围边界的距离,即可移动平台刹车后会越出所述运动范围,则需要接管并控制所述可移动平台。其中,所述接管可移动平台可以理解为由执行该控制方法的主体接管可移动平台的控制权限。即锁定了用户的控制权限,用户无法自主控制可移动平台,具体表现为锁定遥控终端的控件,如锁定遥控器摇杆、拨轮等。在接管状态下,用户无法通过拨动摇杆、拨轮等控件来控制可移动平台。所述接管的任务类型可以是控制所述可移动平台执行刹车指令等操作。此外,当所述可移动平台处于飞行状态时,在完成刹车后,可以继而控制其于空中悬停或原地降落;还可以控制其朝预先记录的返航点返航,所述返航点可以通过执行步骤110
‑
步骤112确定,将开始运动前可移动平台所处的位置设置为返航点,还可以由用户在所述运动范围内选取任一位置作为返航点。优选的,所述返航点可以设置在所述运动范围内,从而确保所述可移动平台在接管后可返回所述运动范围内,当然,也并非一定要设置在运动范围内,其还可以是其他用户自定义的返航点。此外,示例性地,在返航过程中,当可移动平台返航至所述运动范围内,允许取消所述可移动平台的接管。具体地,在返航过程中,若检测到可移动平台的实时位置处于所述运动范围内,则取消锁定遥控终端的控件,用户可以重新通过遥控终端来控制可移动平台,并取消返航。但若用户未对遥控终端上的控件进行拨动等操作,则继续返航直至回到返航点或用户重新控制可移动平台。
85.当所述可移动平台处于飞行状态下,在返航过程中,当可移动平台返航至所述运动范围内,优选地,当所述可移动平台在所述运动范围内的实时位置与所述运动范围的边界的最短距离大于预留距离,则取消接管,且控制可移动平台切换至刹车前的第一飞行模式。通过设定一个安全的预留距离,只有在所述可移动平台与所述运动范围的边界的最短距离大于该预留距离时,才能取消接管,并将可移动平台切换回第一飞行模式,可以避免在可移动平台刚返航至所述运动范围内时,由于用户错误操作等,导致可移动平台又重新越出所述运动范围,降低了可移动平台反复越出运动范围的风险。其中第一飞行模式可以是在可移动平台在被接管前所处的飞行模式,也可以是其他指定的飞行模式,对此不做限定。
86.可选地,本发明提供的一种控制方法还包括如图5的步骤,包括:
87.步骤510:判断处于所述运动范围内的可移动平台与所述运动范围的边界距离是否小于预设距离。
88.其中,所述预设距离至少部分地基于所述可移动平台的最大刹车距离确定。所述最大刹车距离至少部分地基于所述可移动平台的最大速度和最大加速度确定。如根据所述可移动平台的最大速度v
max
和最大刹车加速度a
max
,通过公式可计算出所述可移动平台的最大刹车距离s
max
。所述预设距离应当至少大于所述最大刹车距离。对于新手用户,可以设置一个长预设距离,对于操作熟练的用户,可以设置一个短预设距离。
89.步骤520:发出指示可移动平台靠近边界的提示信息。
90.当可移动平台与所述运动范围的边界距离小于所述预设距离时,则发出靠近边界
的提示信息。所述预设距离至少大于所述最大刹车距离,给用户提供了充分的时间进行减速或转变运动方向。
91.上述步骤120
‑
130与步骤510
‑
520的执行没有先后时间顺序,步骤120
‑
130与步骤510
‑
520可同时执行。
92.本发明提供的用于控制可移动平台的控制方法,通过实时跟踪计算可移动平台的刹车距离,当刹车后可移动平台会越出预设的运动范围,则接管控制可移动平台。通过以上的方法,可以有效控制可移动平台在所限定的范围内运动,避免出现可移动平台失控、失联继而丢失的情况,保障了可移动平台的运动安全。
93.参见图6,为本发明根据一个优选的实施例示出的一种控制方法,用于控制无人飞行器,具体包括:
94.步骤611:获取指示运动范围的信息。
95.所述运动范围为无人飞行器允许飞行的飞行范围,可以由用户设定;也可以由地理位置信息确定,如避开国家规定的禁飞区;还可以基于检测的地形信息确定,如避开树林、建筑物密集的区域。
96.步骤612:检查是否能接收gps信号,无人飞行器当前位置是否在所述运动范围中。
97.若是,则执行步骤613,若否,则返回步骤611,通过调整运动范围,或无人飞行器的位置,将无人飞行器移动至所述运动范围内。
98.步骤613:记录所述当前位置,并定义为返航点。
99.步骤620:用户控制无人飞行器飞行。
100.无人飞行器在所述当前位置起飞,且由用户控制其在所述运动范围内自由飞行。
101.步骤631:基于所述无人飞行器在所述运动范围内的实时运动信息确定预测反应时间后所述无人飞行器的预测位置。
102.包括:基于所述无人飞行器的实时速度、加速度以及预设反应时间中的至少一个得到所述预设反应时间内所述无人飞行器的运动轨迹;并基于所述运动轨迹确定预设反应时间后所述无人飞行器的预测位置。
103.步骤632:所述预测位置是否在所述运动范围内。
104.若是,则执行步骤633a,若否,则执行步骤633b。
105.步骤633a:获取所述无人飞行器的实时刹车距离。
106.所述实时刹车距离基于但不仅限于实时速度信息、或预设刹车时间、或预设加速度等,至少其中一个确定。具体实现方式如上所述,在此不再赘述。
107.步骤633b:接管所述无人飞行器,刹车、悬停并返航。
108.在步骤633a后,执行步骤634:刹车距离是否大于所述无人飞行器实时位置与所述运动范围边界距离。
109.若是,代表所述无人飞行器刹车后会越出所述运动范围,则执行步骤633b。若否,则返回步骤633a,继续计算获取实时刹车距离。
110.在步骤633b后,执行步骤635:所述无人飞行器的当前位置是否在所述运动范围内。
111.在返航过程中,无人飞行器会从所述运动范围外的区域进入到所述运动范围内。若是,则执行步骤636,若否,则返回步骤633b,继续返航。
112.步骤636:继续返航,但允许取消锁定遥控控件。
113.若可移动平台返航至所述运动范围内,允许取消对所述可移动平台的接管。用户可以重新通过遥控终端来控制可移动平台,并取消返航。
114.步骤637:用户是否重新控制无人飞行器。
115.若用户重新对遥控控件进行拨动等操作,则返回步骤620,让用户重新控制无人飞行器飞行,若用户未对遥控控件进行拨动等操作,则返回步骤636,继续返航直至回到返航点或用户重新控制无人飞行器。
116.在执行步骤631
‑
637,还可以同时执行步骤641
‑
642。
117.步骤641:判断处于所述运动范围内的无人飞行器与所述运动范围的边界距离是否小于预设距离。
118.其中,所述预设距离至少部分地基于所述无人飞行器的最大刹车距离确定;所述最大刹车距离至少部分地基于所述无人飞行器的最大速度和最大加速度确定。
119.步骤642:发出指示无人飞行器靠近边界的提示信息。
120.当无人飞行器与所述运动范围的边界距离小于所述预设距离时,则发出靠近边界的提示信息。给用户提供了充分的时间进行减速或转变运动方向。
121.本发明提供的用于控制可移动平台的控制方法,通过实时跟踪计算可移动平台的刹车距离,当刹车后可移动平台会越出预设的运动范围,则接管控制可移动平台。通过以上的方法,可以有效控制可移动平台在所限定的范围内运动,避免出现可移动平台失控、失联继而丢失的情况,保障了可移动平台的运动安全。
122.基于上述任意实施例所述的控制方法,本发明还提供了如图7所示的控制装置的结构示意图。如图7,在硬件层面,该控制装置包括处理器、内部总线、网络接口、内存以及非易失性存储器,当然还可能包括其他业务所需要的硬件。
123.处理器从非易失性存储器中读取对应的计算机程序到内存中运行,以实现上述任意实施例所述的控制方法。
124.基于上述任意实施例所述的控制方法,本发明还提供了如图8所示的可移动平台的结构示意图。如图8,在硬件层面,该无人飞行器包括机体、动力装置与控制装置,所述控制装置为如图7所示的控制装置,包括处理器、内部总线、网络接口、内存以及非易失性存储器,当然还可能包括其他业务所需要的硬件。处理器从非易失性存储器中读取对应的计算机程序到内存中运行,以实现上述任意实施例所述的控制方法。
125.基于上述任意实施例所述的控制方法,本发明还提供了如图9所示的遥控终端的结构示意图。如图9,在硬件层面,该遥控终端包括输入设备与控制装置,所述控制装置为如图7所示的控制装置,包括处理器、内部总线、网络接口、内存以及非易失性存储器,当然还可能包括其他业务所需要的硬件。处理器从非易失性存储器中读取对应的计算机程序到内存中然后运行,以实现上述任意实施例所述的控制方法。其中输入设备可以用来供用户输入所想要设定的参数,例如前面实施例中所提到的飞行范围、返航点、反应时间、加速度等,输入设备的类型可以根据遥控终端的类型而确定,对此不做限定。例如在遥控终端为手机端时,输入设备可能是触摸显示屏,在遥控终端为笔记本电脑时,输入设备可能是键盘、鼠标等。
126.基于上述任意实施例所述的控制方法,本发明还提供了如图10所示的控制系统的
结构示意图。如图10,在硬件层面,该控制系统包括可移动平台,与所述可移动平台通信连接的遥控终端。所述遥控终端用于生成指示运动范围的信息;所述可移动平台包括如图7所示的控制装置,当然,不排除遥控终端也同时包括如图7所示的控制装置,从而既可以由可移动平台接管自身,也可以是由遥控终端接管可移动平台,还可能是由可移动平台上和遥控终端上共同接管,来实现上述任意实施例所述的控制方法。
127.本发明还提供了一种计算机存储介质,存储介质存储有计算机程序,计算机程序被处理器执行时可用于执行上述任意实施例所述的控制方法。
128.对于装置实施例而言,由于其基本对应于方法实施例,所以相关之处参见方法实施例的部分说明即可。以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
129.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
130.以上对本发明实施例所提供的方法和装置进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。