1.本发明涉及信号诊断技术领域,尤其涉及一种电驱总成控制器容错型故障检测与保护方法。
背景技术:
2.随着充电桩的普及以及国家政策的大力支持,新能源汽车的发展日渐迅速,市场连续高速增长,技术不断发展创新,越来越多的人选择新能源汽车作为其代步工具,既能节能减排,又可以节约用车成本。在这样一个发展现状下,新能源汽车的驾驶安全性、稳定性、舒适性以及用户使用满意度日益受到关注。电驱总成控制器是新能源汽车的核心零部件,为其提供运行动力,在电驱总成控制器中,igbt功率管作为控制器逆变电路控制的核心部件,其故障检测及保护极为重要,驱动芯片作为igbt功率管的控制单元,定义其输出故障为最高等级故障。驱动板含有6个驱动芯片对6个igbt功率管进行实时的故障检测及保护,避免其在有故障时运行,造成损坏。若启动时检测到驱动故障,则整车启动失败,禁止上电;若运行中检测到驱动故障,则立刻停止功率管输出,整车动力丢失。
3.在整车系统中,由于驱动电路设计、车载低压波动、电磁干扰等因素的影响,导致硬件驱动故障检测电路误检到故障,会导致电驱总成控制器检测到严重故障,造成整车启动失败或行驶中动力丢失等严重后果。因此,需要对检测到的故障的真实性进行判别。
技术实现要素:
4.本发明主要解决现有的电驱总成控制器的故障检测方法中无法对检测到的故障的真实性进行判别的技术问题;提供一种电驱总成控制器容错型故障检测与保护方法,对检测到故障的真实性进行判别,很大程度上避免了整车出现因驱动故障误检测造成的启动失败问题。
5.本发明的上述技术问题主要是通过下述技术方案得以解决的:本发明包括以下步骤:
6.a)设定接收到整车启动的请求信号至整车完全启动的时间间隔为t;
7.b)接收到整车启动的请求信号后对电驱总成控制器进行故障检测;
8.c)判断在时间间隔t内是否检测到故障,若未检测到故障,则输出电驱总成控制器无故障,整车正常启动;若检测到故障,则进入步骤d);
9.d)对检测到的故障进行真假判断,若检测到的故障为假故障,则输出电驱总成控制器无故障,整车正常启动;若检测到的故障为真故障,则输出电驱总成控制器存在故障,整车禁止启动。
10.对检测到故障的真实性进行判别,很大程度上避免了整车出现因驱动故障误检测造成的启动失败问题。
11.作为优选,所述的步骤d)中对检测到的故障进行真假判断具体包括:
12.重复对故障进行复位操作,若在时间间隔t内复位成功,则停止复位操作且检测到
的故障为假故障,反之,若在时间间隔t内未复位成功,则检测到的故障为真故障。作为优选,所述的。
13.作为优选,所述的复位操作具体包括:
14.1)对复位次数进行一次累加;
15.2)判断复位次数是否达到设定复位次数的上限,若未到达设定复位次数的上限,则进入步骤3),反之,若到达设定复位次数的上限,则进入步骤6);
16.3)进行驱动故障复位动作;
17.4)延时δt1后,结束驱动故障复位动作,进行总故障复位动作;
18.5)延时δt2后,结束总故障复位动作;
19.6)对驱动板下电;
20.7)延时δt3后,对驱动板上电;
21.8)延时δt4后,完成驱动板重启动作,并对复位次数清零,并返回步骤1)。
22.驱动故障复位操作,复位时间δt1,复位完成后进行总故障复位操作,复位时间δt2,若故障未复位成功,则连续重复执行两个复位动作,若连续多次复位失败到达复位次数的上限,则进行驱动板重启动作,驱动板下电时间δt3,重新上电后延时δt4,再次重复驱动故障复位与总故障复位动作,直至故障复位成功或复位超时。
23.作为优选,所述的在重复对故障进行复位操作前,对检测到故障的当前时刻进行判断,判断当前时候是否为整车完全启动时刻,若是,则输出电驱总成控制器存在故障,整车禁止启动,反之,则重复对故障进行复位操作。
24.由于对检测到的故障进行真假判断需要一定的时间,故当检测到故障的当前时刻为整车完全启动时间时,无需对检测到的故障进行真假判断,直接默认其为真故障。
25.作为优选,所述的步骤c)中,若持续t'时间内未检测到故障,则输出电驱总成控制器无故障,停止故障检测,整车正常启动,其中0.02t≤t'≤0.05t。减少了资源的浪费。
26.作为优选,所述的步骤2)中通过故障检测电路进行故障检测,所述故障检测电路包括电压转换芯片u11、电阻r1~电阻r8、电容c1~电容c6、与非门u12c和三极管q5,所述电压转换芯片u11的vccb引脚与电阻r1的一端、电容c2的一端和 5v电源电连接,所述电压转换芯片u11的b1引脚与电阻r1的另一端电连接并接收驱动板输出的故障信号,所述电压转换芯片u11的b2引脚接收驱动板输出的故障信号,所述电压转换芯片u11的dir引脚与电阻r2、电阻r3的一端和电容c1的一端电连接,所述电压转换芯片u11的vcca引脚与电容c4的一端电连接并输出 3.3v电源,所述电压转换芯片u11的a1引脚与电阻r4的一端、电容c3的一端和与非门u12c的a输入引脚电连接并输出故障信号至主控芯片,所述电压转换芯片u11的a2引脚与电阻r5的一端、电容c5的一端和与非门u12c的b输入引脚电连接并输出故障信号至主控芯片,所述电阻r4的另一端和电阻r5的另一端与 3.3v电源电连接,所述与非门u12c的y输出引脚通过电阻r6与电阻r7的一端、电容c6的一端和三极管q5的基极电连接,所述三极管q5的集电极与总故障锁存和复位电路电连接,所述三极管q5的集电极通过电阻r8与 3.3v电源电连接,所述电阻r3的另一端、电容c1的另一端、电容c2的另一端、电容c4的另一端、电容c3的另一端、电容c5的另一端、电阻r7的另一端、电容c6的另一端、电压转换芯片u11的gnd引脚和三极管q5的发射极均接地。
27.电压转换芯片u11接收驱动板输出的驱动故障信号和过流故障信号并将上述故障
信号输出接至主控芯片,作为主芯片故障检测输入信号;同时电压转换芯片u11输出驱动故障信号和过流故障信号至与非门u12c的a输入引脚和b输入引脚,有故障信号输入时,输入引脚输入的是低电平,当两个引脚有至少1个输入为低电平时,y输出引脚输出高电平,否则输出低电平;与非门u12c的y输出引脚经过rc滤波电路后接至三极管q5,控制三极管通断状态,三极管q5d集电极接总故障锁存和复位电路中的故障锁存电路。
28.作为优选,所述的步骤4)中通过总故障锁存和复位电路进行总故障复位动作,所述总故障锁存和复位电路包括电阻r9~电阻r22、电容c7~电容c14、三极管q6~三极管q6、与非门u12a、与非门u12b、与非门u12d、发光二极管led、二极管d23和二极管d22,所述与非门u12d的a输入引脚和b输入引脚均与电阻r18的一端和电阻r17的一端电连接,所述电阻r18的另一端接入 3.3v电源,所述电阻r17的另一端接收主控芯片输出的总故障复位信号,所述与非门u12d的y输出引脚与电阻r19的一端和电阻r20的一端电连接,所述电阻r20的另一端与电容c10的一端和三极管q8的基极电连接,三极管q8的集电极通过电阻r21与电容c11的一端、电容c12的一端、电阻r22的一端和与非门u12a的b输入引脚端电连接,所述电阻r22的另一端接入 3.3v电源,所述与非门u12a的a输入引脚与与非门u12b的y输出引脚电连接,所述与非门u12a的y输出引脚与与非门u12b的b输入引脚电连接,所述与非门u12a的vcc引脚接入 3.3v电源,所述与非门u12a的vcc引脚通过电容c13接地,所述与非门u12a的gnd引脚接地,所述与非门u12b的y输出引脚与电阻r15的一端、电阻r16的一端和电容c14的一端电连接并输出总故障信号,所述电阻r15的另一端接入 3.3v电源,所述电阻r16的另一端通过发光二极管led接地,所述非门u12b的a输入引脚与电阻r14的一端和三极管q6的集电极电连接并通过二极管d22与故障检测电路电连接,所述电阻r14的另一端接入 3.3v电源,所述三极管q6的基极与电容c9的一端、电阻r13的一端和电阻r12的一端电连接,所述电阻r12的另一端与二极管d23的正极电连接,所述二极管d23的负极与电容c8的一端、电阻r11的一端和三极管q7的集电极电连接,所述电阻r11的另一端接入 3.3v电源,所述三极管q7的基极通过电阻r10接地,所述三极管q7的基极依次通过电阻r9和电容c7与方波输入信号电连接,所述电阻r19的另一端、电容c10的另一端、三极管q8的发射极、电容c11的另一端、电容c12的另一端、电容c14的另一端、三极管q6的发射极、电容c9的另一端、电阻r13的另一端、电容c8的另一端、三极管q7的发射极和电阻r10的另一端均接地。
29.总故障锁存和复位电路接收主控芯片输出的总故障复位信号,作为总故障锁存和复位电路中复位电路的输入,输入低电平进行总故障复位动作,此时与非门u12a的y输出引脚输出高电平,反之则输出低电平;当与非门u12b的a输入引脚和b输入引脚中有至少1个输入为低电平时,其y输出引脚输出高电平,输出总故障信号至控主芯片;与非门u12b的a输入引脚反应当前故障状态,有驱动故障或过流故障时该引脚为低电平状态;与非门u12b的b输入引脚反应故障锁存及复位状态,若无复位动作,且上一时刻有总故障,该脚为低电平状态,若无复位动作,且上一时刻无总故障,该脚为高电平状态;若有复位动作,无论上一时刻有无故障,该脚为高电平状态。
30.作为优选,所述的对电压转换芯片u11接收到的故障信号进行衰减补偿,具体包括:
31.根据电压转换芯片u11接收到的故障信号的强度所在区段范围选择其对应的衰减补偿函数δm=f
i
(m
d
),其中m
d
表示电压转换芯片u11接收到的故障信号的强度,δm表示传
输过程中故障信号的强度的衰减量,i表示区段编号;
32.通过衰减补偿函数求得故障信号的强度从驱动板传输至电压转换芯片u11过程中的衰减量,并将其与电压转换芯片u11接收到的故障信号的强度相加即完成对电压转换芯片u11接收到的故障信号的衰减补偿。
33.对驱动板传输到电压转换芯片的故障信号进行衰减补偿,提高故障信号的质量,保证了故障检测的精准度。
34.作为优选,所述的衰减补偿函数通过以下方法获取:
35.i)制作衰减补偿函数获取模型,所述衰减补偿函数获取模型包括驱动板故障信号输出模拟器、通信线缆和电压转换芯片,所述驱动板故障信号输出模拟器能够模拟输出驱动板故障信号,所述通信线缆与整车中连接驱动板和电压转换芯片u11的通信线缆为同一根通信线缆,所述电压转换芯片与整车中的电压转换芯片u11相同;
36.ii)控制驱动板故障信号输出模拟器阶梯式输出故障信号,测量输出的故障信号的强度m和电压转换芯片接收的故障信号的强度m
d
,相减得到传输过程中故障信号的强度的衰减量δm;
37.iii)已知驱动板故障信号输出模拟器输出的故障信号的最小强度和和最大强度,得到驱动板故障信号输出模拟器输出的故障信号的强度范围,将强度范围平均分成n个区段,用i表示区段编号,i=1,2,
…
,n;
38.iv)将步骤ii)中的电压转换芯片接收的故障信号的强度md和传输过程中故障信号的强度的衰减量δm根据步骤iii)中所划分的区段进行归类,归类结束后拟合获取每个区段所对应的衰减补偿函数δm=f
i
(m
d
)。
39.提高了故障信号衰减补偿的精准确度。
40.作为优选,所述的衰减补偿函数获取方法还包括以下步骤:
41.v)将每个区段平均分成n个分段;
42.vi)计算每个分段所对应的衰减补偿函数的函数图像的面积与该分段的标准衰减补偿函数的函数图像的面积之差,若面积之差小于设定值,则无需对该分段所对应的衰减补偿函数修正,反之,则进入步骤vii)对该分段所对应的衰减补偿函数进行修正;
43.vii)从步骤ii)中获取该分段所对应的电压转换芯片接收的故障信号的强度md和传输过程中故障信号的强度的衰减量δm,拟合获取给分段所对应的衰减补偿函数δm=f
i
j(m
d
),其中j表示该分段在其所在区段内的分段编号。
44.提高了故障信号衰减补偿的精准确度。
45.本发明的有益效果是:
46.1)接收到整车启动请求到整车完全启动存在一定的时间间隔,利用该时间间隔,进行故障检测,若检测到驱动故障,并且未到整车启动时刻,则先进行驱动故障复位操作,延时后进行总故障复位操作;若连续多次复位失败到达复位次数的上限,则进行驱动板重新上下电操作,重启驱动板后继续对故障进行复位操作,若在此期间故障复位成功,则停止复位动作,输出无故障;若直至到达整车完全启动时间,仍存在故障未复位成功,则输出存在驱动故障及总故障,整车检测到严重故障,整车启动失败,充分利用了接收到整车启动请求到完全启动的时间间隔,很大程度上避免了整车出现因驱动故障误检测造成的启动失败问题;
47.2)对驱动板传输到电压转换芯片的故障信号进行衰减补偿,提高故障信号的质量,保证了故障检测的精准度。
附图说明
48.图1是本发明的一种方法流程示意图。
49.图2是本发明的故障检测电路以及总故障锁存和复位电路的一种电路原理图。
50.图3是本发明的一种复位操作执行时序图
具体实施方式
51.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
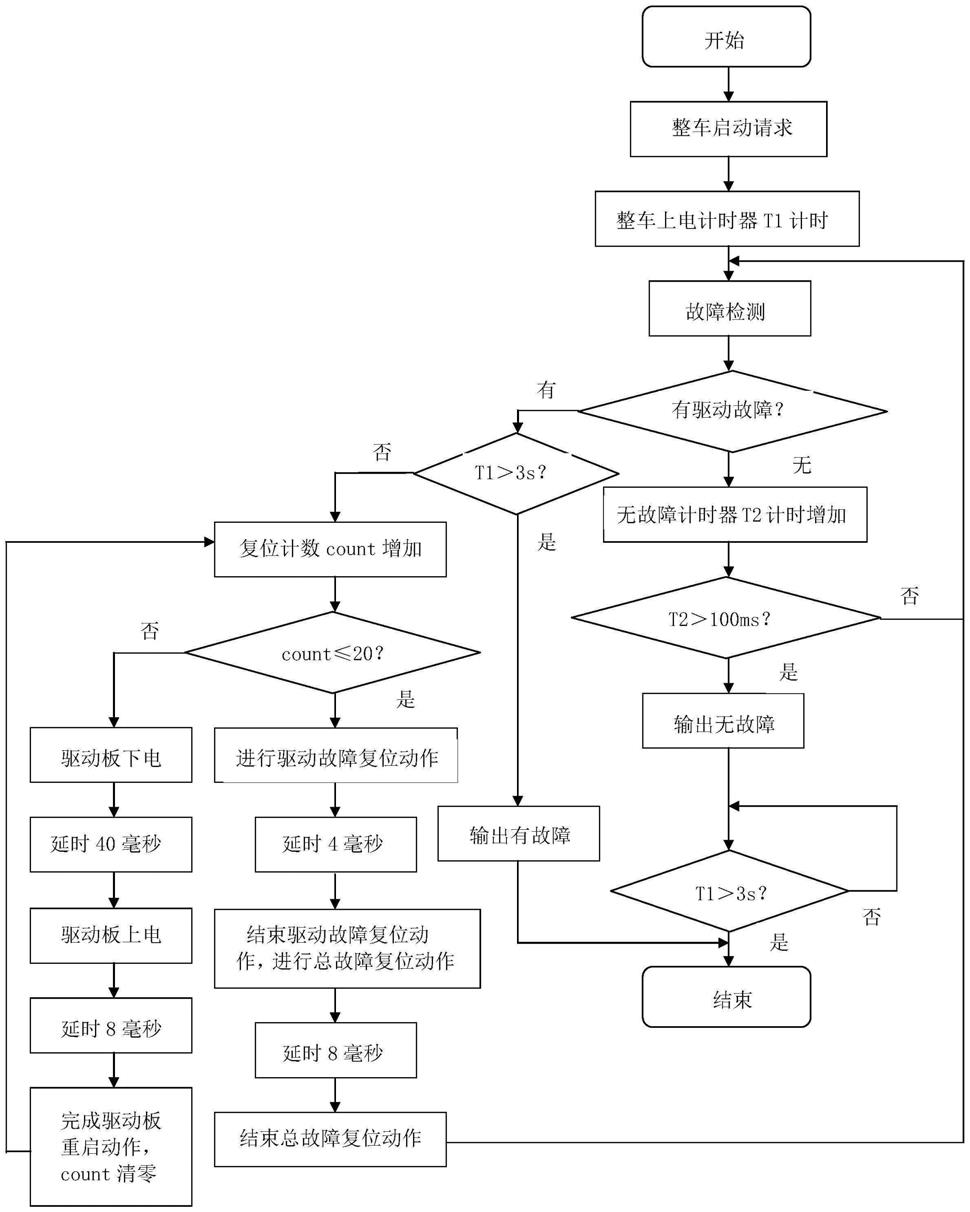
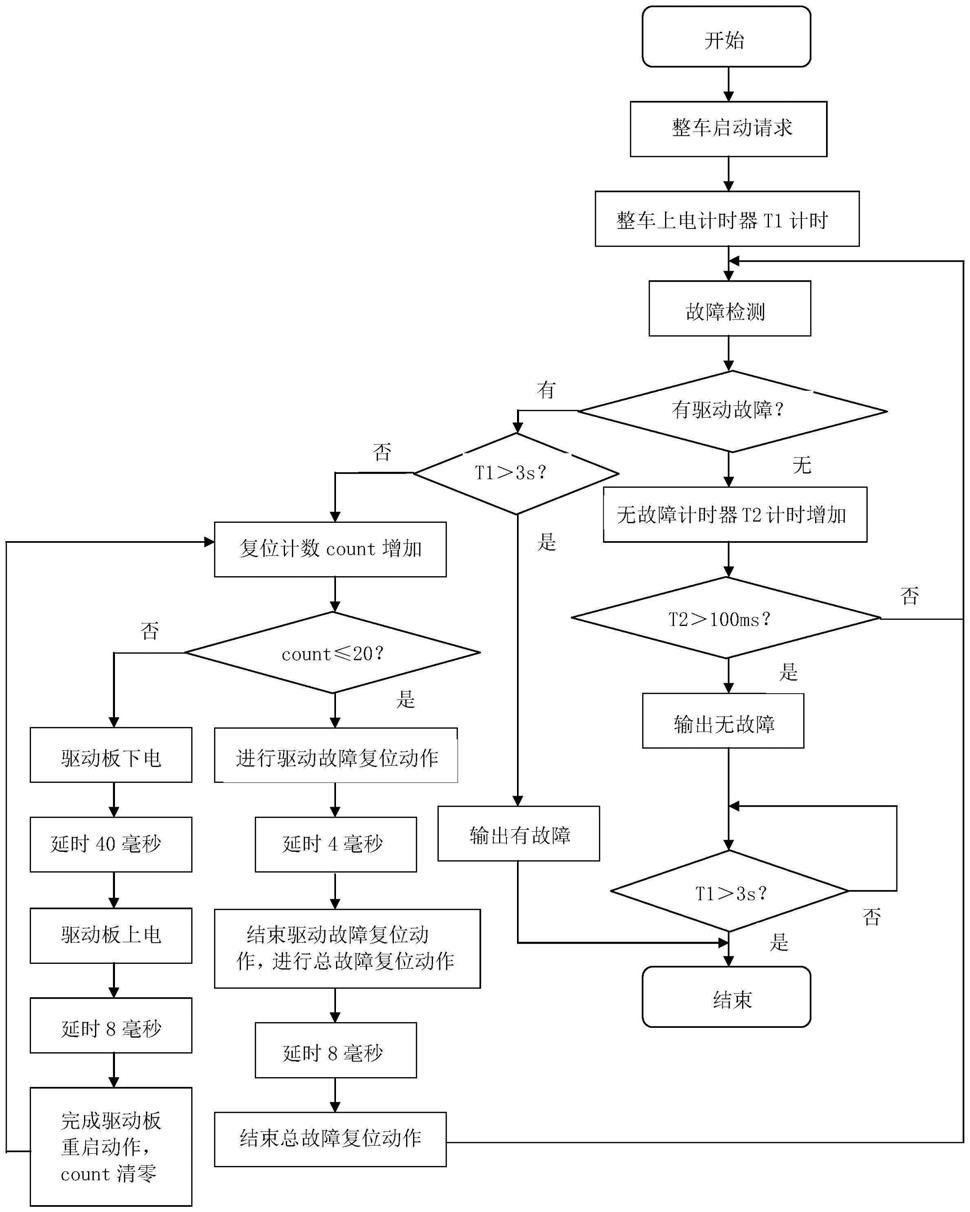
52.实施例1:本实施例的一种电驱总成控制器容错型故障检测与保护方法,如图1所示,包括以下步骤:
53.a)设定接收到整车启动的请求信号至整车完全启动的时间间隔为t,在本实施例中t=3秒;
54.b)接收到整车启动的请求信号后对电驱总成控制器进行故障检测;
55.c)判断在时间间隔t内是否检测到故障,若未检测到故障,则输出电驱总成控制器无故障,整车正常启动;若检测到故障,则进入步骤d);
56.进一步的,在时间间隔t内,若持续t'时间内未检测到故障,则输出电驱总成控制器无故障,并停止故障检测,等待整车完全启动时刻达到后整车正常启动,其中0.02t≤t'≤0.05t,在本实施例中,t'=100毫秒;
57.d)对检测到的故障进行真假判断:
58.对检测到故障的当前时刻进行判断,判断当前时候是否为整车完全启动时刻,若是,则输出电驱总成控制器存在故障,整车禁止启动,反之,则重复对故障进行复位操作,若在时间间隔t内复位成功,则停止复位操作且检测到的故障为假故障,反之,若在时间间隔t内未复位成功,则检测到的故障为真故障。
59.其中复位操作具体包括:
60.1)对复位次数进行一次累加;
61.2)判断复位次数是否达到设定复位次数的上限,若未到达设定复位次数的上限,则进入步骤3),反之,若到达设定复位次数的上限,则进入步骤6);
62.3)进行驱动故障复位动作;
63.4)延时δt1后,结束驱动故障复位动作,进行总故障复位动作;
64.5)延时δt2后,结束总故障复位动作,判断是否复位成功,若未复位成功,则返回步骤2),反之,若复位成功,则结束复位操作;
65.6)对驱动板下电;
66.7)延时δt3后,对驱动板上电;
67.8)延时δt4后,完成驱动板重启动作,并对复位次数清零,并返回步骤1)。
68.复位操作的执行时序图如图3所示,驱动故障复位操作,复位时间δt1,复位完成后进行总故障复位操作,复位时间δt2,若故障未复位成功,则连续重复执行两个复位动作,若连续20次复位失败,则进行驱动板重启动作,驱动板下电时间δt3,重新上电后延时
δt4,再次重复驱动故障复位与总故障复位动作,直至故障复位成功或复位超时。
69.在本实施例中,δt1=4毫秒,驱动故障复位信号保持时间,参考驱动故障复位所需最短时间确定;δt2=8毫秒,总故障复位信号保持时间,参考总故障复位所需最短时间确定;δt3=40毫秒,驱动板下电维持时间,参考驱动板完全下电休眠所需最短时间确定;δt4=8毫秒,驱动板上电到开始故障检测间隔时间,参考驱动板完成上电所需最短时间确定;复位次数的上限为20次。
70.若检测到的故障为假故障,则输出电驱总成控制器无故障,整车正常启动;若检测到的故障为真故障,则输出电驱总成控制器存在故障,整车禁止启动。
71.故障检测通过故障检测电路实现,总故障复位动作通过总故障锁存和复位电路实现,驱动故障复位通过主控芯片发送复位信号至驱动板,驱动板上下电实现复位。主控芯片的型号为恩智浦的mpc5744prm主芯片。
72.接收到整车启动请求到整车完全启动存在一定的时间间隔,利用该时间间隔,对igbt功率管进行故障检测,若检测到驱动故障,并且未到整车启动时刻,则先进行驱动故障复位操作,延时后进行总故障复位操作;若连续20次驱动故障复位失败,则进行驱动板重新上下电操作,重启驱动板后继续对故障进行复位操作,若在此期间故障复位成功,则停止复位动作,输出无故障;若直至到达整车完全启动时间,仍存在故障未复位成功,则输出存在驱动故障及总故障,整车检测到严重故障,整车启动失败。充分利用了接收到整车启动请求到完全启动的时间间隔,很大程度上避免了整车出现因驱动故障误检测造成的启动失败问题。
73.如图2所示,故障检测电路包括电压转换芯片u11、电阻r1~电阻r8、电容c1~电容c6、与非门u12c和三极管q5,电压转换芯片u11的vccb引脚与电阻r1的一端、电容c2的一端和 5v电源电连接,电压转换芯片u11的b1引脚与电阻r1的另一端电连接并接收驱动板输出的故障信号,电压转换芯片u11的b2引脚接收驱动板输出的故障信号,电压转换芯片u11的dir引脚与电阻r2、电阻r3的一端和电容c1的一端电连接,电压转换芯片u11的vcca引脚与电容c4的一端电连接并输出 3.3v电源,电压转换芯片u11的a1引脚与电阻r4的一端、电容c3的一端和与非门u12c的a输入引脚电连接并输出故障信号至主控芯片,电压转换芯片u11的a2引脚与电阻r5的一端、电容c5的一端和与非门u12c的b输入引脚电连接并输出故障信号至主控芯片,电阻r4的另一端和电阻r5的另一端与 3.3v电源电连接,与非门u12c的y输出引脚通过电阻r6与电阻r7的一端、电容c6的一端和三极管q5的基极电连接,三极管q5的集电极与总故障锁存和复位电路电连接,三极管q5的集电极通过电阻r8与 3.3v电源电连接,电阻r3的另一端、电容c1的另一端、电容c2的另一端、电容c4的另一端、电容c3的另一端、电容c5的另一端、电阻r7的另一端、电容c6的另一端、电压转换芯片u11的gnd引脚和三极管q5的发射极均接地。
74.总故障锁存和复位电路包括电阻r9~电阻r22、电容c7~电容c14、三极管q6~三极管q6、与非门u12a、与非门u12b、与非门u12d、发光二极管led、二极管d23和二极管d22,与非门u12d的a输入引脚和b输入引脚均与电阻r18的一端和电阻r17的一端电连接,电阻r18的另一端接入 3.3v电源,电阻r17的另一端接收主控芯片输出的总故障复位信号,与非门u12d的y输出引脚与电阻r19的一端和电阻r20的一端电连接,电阻r20的另一端与电容c10的一端和三极管q8的基极电连接,三极管q8的集电极通过电阻r21与电容c11的一端、电容
c12的一端、电阻r22的一端和与非门u12a的b输入引脚端电连接,电阻r22的另一端接入 3.3v电源,与非门u12a的a输入引脚与与非门u12b的y输出引脚电连接,与非门u12a的y输出引脚与与非门u12b的b输入引脚电连接,与非门u12a的vcc引脚接入 3.3v电源,与非门u12a的vcc引脚通过电容c13接地,与非门u12a的gnd引脚接地,与非门u12b的y输出引脚与电阻r15的一端、电阻r16的一端和电容c14的一端电连接并输出总故障信号,电阻r15的另一端接入 3.3v电源,电阻r16的另一端通过发光二极管led接地,非门u12b的a输入引脚与电阻r14的一端和三极管q6的集电极电连接与二极管d22的正极电连接,二极管d22的负极与故障检测电路中的三级管q5的集电极电连接,电阻r14的另一端接入 3.3v电源,三极管q6的基极与电容c9的一端、电阻r13的一端和电阻r12的一端电连接,电阻r12的另一端与二极管d23的正极电连接,二极管d23的负极与电容c8的一端、电阻r11的一端和三极管q7的集电极电连接,电阻r11的另一端接入 3.3v电源,三极管q7的基极通过电阻r10接地,三极管q7的基极依次通过电阻r9和电容c7与方波输入信号电连接,电阻r19的另一端、电容c10的另一端、三极管q8的发射极、电容c11的另一端、电容c12的另一端、电容c14的另一端、三极管q6的发射极、电容c9的另一端、电阻r13的另一端、电容c8的另一端、三极管q7的发射极和电阻r10的另一端均接地。
75.电压转换芯片u11接收驱动板输出的驱动故障信号和过流故障信号并将上述故障信号输出接至主控芯片,作为主芯片故障检测输入信号;同时电压转换芯片u11输出驱动故障信号和过流故障信号至与非门u12c的a输入引脚和b输入引脚,有故障信号输入时,输入引脚输入的是低电平,当两个引脚有至少1个输入为低电平时,y输出引脚输出高电平,否则输出低电平;与非门u12c的y输出引脚经过rc滤波电路后接至三极管q5,控制三极管通断状态,三极管q5d集电极接总故障锁存和复位电路中的故障锁存电路。
76.总故障锁存和复位电路接收主控芯片输出的总故障复位信号,作为总故障锁存和复位电路中复位电路的输入,输入低电平进行总故障复位动作,此时与非门u12a的y输出引脚输出高电平,反之则输出低电平;当与非门u12b的a输入引脚和b输入引脚中有至少1个输入为低电平时,其y输出引脚输出高电平,输出总故障信号至控主芯片;与非门u12b的a输入引脚反应当前故障状态,有驱动故障或过流故障时该引脚为低电平状态;与非门u12b的b输入引脚反应故障锁存及复位状态,若无复位动作,且上一时刻有总故障,该脚为低电平状态,若无复位动作,且上一时刻无总故障,该脚为高电平状态;若有复位动作,无论上一时刻有无故障,该脚为高电平状态。
77.实施例2:本实施例的一种电驱总成控制器容错型故障检测与保护方法,由于故障信号在从驱动板到电压转换芯片的过程中会出现信号衰减,为了保证电压转换芯片接收到的故障信号的质量,本实施例在实施例1的基础上对电压转换芯片u11接收到的故障信号进行衰减补偿,具体包括:
78.①
获取标准衰减补偿函数:
79.i)制作衰减补偿函数获取模型,所述衰减补偿函数获取模型包括驱动板故障信号输出模拟器、通信线缆和电压转换芯片,所述驱动板故障信号输出模拟器能够模拟输出驱动板故障信号,所述通信线缆为制作工艺优良无瑕疵且与整车使用的通信线缆为同一规格,所述电压转换芯片与整车中的电压转换芯片u11相同;
80.ii)控制驱动板故障信号输出模拟器阶梯式输出故障信号,测量输出的故障信号
的强度m和电压转换芯片接收的故障信号的强度m
d
,相减得到传输过程中故障信号的强度的衰减量δm;
81.iii)已知驱动板故障信号输出模拟器输出的故障信号的最小强度和和最大强度,得到驱动板故障信号输出模拟器输出的故障信号的强度范围,将强度范围平均分成n个区段,用i表示区段编号,i=1,2,
…
,n;
82.iv)将步骤ii)中的电压转换芯片接收的故障信号的强度md和传输过程中故障信号的强度的衰减量δm根据步骤iii)中所划分的区段进行归类,归类结束后拟合获取每个区段所对应的标准衰减补偿函数δm’=f
i
(m
d
)。
83.②
获取衰减补偿函数
84.i)制作衰减补偿函数获取模型,所述衰减补偿函数获取模型包括驱动板故障信号输出模拟器、通信线缆和电压转换芯片,所述驱动板故障信号输出模拟器能够模拟输出驱动板故障信号,所述通信线缆与整车中连接驱动板和电压转换芯片u11的通信线缆为同一根通信线缆,所述电压转换芯片与整车中的电压转换芯片u11相同;
85.ii)控制驱动板故障信号输出模拟器阶梯式输出故障信号,测量输出的故障信号的强度m和电压转换芯片接收的故障信号的强度m
d
,相减得到传输过程中故障信号的强度的衰减量δm;
86.iii)已知驱动板故障信号输出模拟器输出的故障信号的最小强度和和最大强度,得到驱动板故障信号输出模拟器输出的故障信号的强度范围,将强度范围平均分成n个区段,用i表示区段编号,i=1,2,
…
,n;
87.iv)将步骤ii)中的电压转换芯片接收的故障信号的强度md和传输过程中故障信号的强度的衰减量δm根据步骤iii)中所划分的区段进行归类,归类结束后拟合获取每个区段所对应的衰减补偿函数δm=f
i
(m
d
);
88.v)将每个区段平均分成n个分段,j=1,2,
…
,n;
89.vi)计算每个分段所对应的衰减补偿函数的函数图像的面积与该分段的标准衰减补偿函数的函数图像的面积之差,若面积之差小于设定值,则无需对该分段所对应的衰减补偿函数修正,反之,则进入步骤vii)对该分段所对应的衰减补偿函数进行修正;
90.vii)从步骤ii)中获取该分段所对应的电压转换芯片接收的故障信号的强度md和传输过程中故障信号的强度的衰减量δm,拟合获取给分段所对应的衰减补偿函数δm=f
i
j(m
d
),其中j表示该分段在其所在区段内的分段编号。
91.③
根据电压转换芯片u11接收到的故障信号的强度所在区段范围选择其对应的衰减补偿函数,衰减补偿函数为δm=f
i
(m
d
)或δm=f
i
j(m
d
);
92.④
通过衰减补偿函数求得故障信号的强度从驱动板传输至电压转换芯片u11过程中的衰减量,并将其与电压转换芯片u11接收到的故障信号的强度相加即完成对电压转换芯片u11接收到的故障信号的衰减补偿。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。