1.本发明涉及状态判断装置、状态判断方法和计算机可读取的存储介质。
背景技术:
2.专利文献1中公开有一种基片输送机构,其设置于对半导体晶片等基片进行处理的基片处理装置。基片输送机构构成为能够在基片处理装置中的不同模块间移动。输送机构例如在承载器与处理模块之间移动,来从收纳多个基片的承载器取出一个基片,并将该基片输送到处理模块。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2013
‑
133192号公报
技术实现要素:
6.发明要解决的技术问题
7.本发明说明能够简易且高精度地判断基片的驱动机构的状态的状态判断装置、状态判断方法和计算机可读取的存储介质。
8.用于解决技术问题的技术方案
9.本发明的一个观点的状态判断装置,判断构成为能够在基片处理装置中保持基片并且使之动作的驱动机构的状态。该状态判断装置包括:构成为能够获取驱动机构的动作数据的获取部;模型生成部,其构成为能够基于正常动作数据,执行使用自动编码器的机器学习,来生成驱动机构的监视模型,其中,正常动作数据来自于在驱动机构的正常动作时由获取部获取到的动作数据;和第一判断部,其构成为能够基于将评价数据输入监视模型而得到的第一输出数据,判断驱动机构的状态,其中,评价数据来自于在驱动机构的评价时由获取部获取到的动作数据。
10.发明效果
11.依照本发明的状态判断装置、状态判断方法和计算机可读取的存储介质,能够简易且高精度地判断基片的驱动机构的状态。
附图说明
12.图1是概略地表示基片处理系统的一例的俯视图。
13.图2是概略地表示输送装置的一例的侧面图。
14.图3是表示控制器的功能性结构的一例的框图。
15.图4是表示控制器的硬件结构的一例的框图。
16.图5是表示输送装置的状态判断流程的一例的流程图。
17.图6是表示监视模型的生成流程的一例的流程图。
18.图7是用于说明基于调整部的获取数据的调整的图。
19.图8是用于说明通过机器学习而生成的监视模型的图。
20.图9是用于说明通过机器学习而生成的监视模型的图。
21.图10是用于说明监视模型中包含的容许误差的图表。
22.图11的(a)和图11的(b)是用于说明容许误差与输出值之间的偏差率的图。
23.图12是用于说明偏差率的阈值的设定方法的图表。
24.图13是表示输送装置的监视流程的一例的流程图。
25.图14是表示监视模型的验证结果的一例的图表。
26.图15是表示监视模型的验证结果的一例的图表。
具体实施方式
27.以下,关于本发明的实施方式的一例,一边参照附图一边更详细地进行说明。在以下的说明中,对于相同要素或者具有相同功能的要素使用相同的附图标记,省略重复的说明。
28.[基片处理装置]
[0029]
图1中所示的基片处理系统1是构成为能够对晶片w实施基片处理的系统。基片处理系统1包括基片处理装置2和控制器60。晶片w可以呈圆板状,也可以使圆形的一部分缺口,还可以呈多边形等圆形以外的形状。晶片w例如可以为半导体基片、玻璃基片、掩模基片、fpd(flat panel display:平板显示器)基片等其它各种基片。晶片w的直径例如为200mm~450mm程度。
[0030]
如图1所示,基片处理装置2包括处理单元3a、3b和输送装置10(驱动机构)。处理单元3a、3b是构成为能够对晶片w实施规定的处理的单元。处理单元3a、3b可以是对晶片w的表面供给处理液的液处理单元。处理单元3a、3b可以是对形成于晶片w的表面的覆膜进行热处理(加热或者冷却)的热处理单元。处理单元3a、3b可以具有彼此相同的功能,也可以具有彼此不同的功能。在图1所示的例子中,在水平方向上,处理单元3a、3b沿着箭头d1方向(图1的左右方向)排列地配置。
[0031]
[输送装置的详情]
[0032]
下面,参照图1和图2,对输送装置10进一步详细地进行说明。输送装置10构成为能够输送晶片w。输送装置10例如可以在处理单元3a与处理单元3b之间输送晶片w。输送装置10可以从基片处理装置2内的其它单元向处理单元3a、3b输送晶片w,也可以从处理单元3a、3b向其它单元输送晶片w。输送装置10可以与处理单元3a、3b相对地配置。输送装置10包括驱动部20和保持部30。
[0033]
驱动部20构成为能够使保持部30在规定的方向上往复移动。驱动部20例如如图1所示,可以使保持部30在处理单元3a和处理单元3b排列的方向(箭头d1方向)上往复移动(动作)。驱动部20包括壳体21、直线移动体22、导轨23、滑轮24、25、传动带26和电动机27。壳体21收纳驱动部20中包含的各要素。在壳体21中的与处理单元3a、3b相对的壁设置有开口21a。
[0034]
直线移动体22是沿着箭头d2的方向(图1的上下方向)延伸的部件。直线移动体22的根端部在壳体21内连接于导轨23和传动带26。直线移动体22的前端部通过开口21a突出到壳体21之外。导轨23以沿着箭头d1方向(壳体21的宽度方向)直线状地延伸的方式铺设于
circuit,专用集成电路)来实现。
[0045]
读取部71具有从计算机可读取的存储介质rm读取程序的功能。存储介质rm存储有用于使伴随晶片w的输送的输送装置10内的各部动作的程序和用于由状态判断部70判断输送装置10的状态的程序。作为存储介质rm,例如可以是半导体存储器、光盘、磁盘、光磁盘。
[0046]
存储部72具有存储各种数据的功能。存储部72例如存储有读取部71中从存储介质rm读取到的程序、判断输送装置10的状态时的各种数据、关于输送装置10的状态的判断结果等。
[0047]
指示部73具有基于存储在存储部72中的使输送装置10内的各部动作的程序,发送控制信号的功能。具体而言,指示部73通过使驱动部33的电动机33f驱动,生成使臂34沿着箭头d2方向移动的控制信号。指示部73通过使驱动部20的电动机27驱动,生成使臂34沿着箭头d1方向移动的控制信号。
[0048]
获取部74具有获取输送装置10的动作数据的功能。获取部74例如可以将电动机33f的扭矩信号作为动作数据来获取。获取部74可以获取臂34的每个动作的扭矩信号。扭矩信号可以是从电动机33f的扭矩的时间变化(模拟信号)按规定的采样周期获得的时序数据。臂34的一个动作,例如可以是通过电动机33f的驱动而臂34在箭头d2方向上单向地移动的动作。获取部74例如也可以从扭矩的时间变动按臂34的每个动作获取100个~200个程度的离散值。获取部74将获取到的扭矩信号输出到调整部75。
[0049]
调整部75具有将由获取部74获取到的动作数据(扭矩信号)的数据量调整成一定数量的功能。臂34的一个动作的动作时间,即使是相同的动作也存在稍微变动的情况。因此,在利用获取部74按一定的采样周期获得扭矩信号的离散值的情况下,存在数据量按臂34的每个动作而不同的情况。调整部75将按臂34的每个动作而不同的扭矩信号的数据量调整成一定数量。调整部75例如也可以对扭矩信号进行离散傅立叶变换(dft:discrete fourier transform)来获取频率数据,对于该频率数据进行离散傅立叶逆变换(idft:inverse discrete fourier transform)以使得变换后的数据量成为规定数量(例如128个)。
[0050]
通过调整扭矩信号的数据量,例如也可以生成数据量被压缩了的扭矩信号。即,可以将具有比规定数量多的数据量的动作数据,调整成被压缩为规定数量的数据量的动作数据(压缩动作数据)。调整部75将调整了数据量的动作数据输出到存储部72和判断部77。调整部75也可以通过其它方法调整动作数据的数据量。调整部75例如在动作数据的数据量超过128个的情况下,也可以将第129个以后的数据除去。调整部75也可以代替数据量的压缩,而调整数据量以使得数据量相对于调整前的扭矩信号的数据量增加。以下,以压缩数据量的情况为例进行说明。
[0051]
模型生成部76具有生成与输送装置10有关的监视模型的功能。在由状态判断部70进行状态判断的对象为驱动部33的情况下,模型生成部76在驱动部33正常动作时基于来自于获取部74获取到的动作数据(扭矩信号)的正常动作数据,执行使用自动编码器的机器学习,由此而生成监视模型。模型生成部76在生成监视模型后,将该监视模型输出到存储部72。正常动作是指,判断为没有发生驱动部33的劣化或者异常等的状态下的驱动部33的动作。正常动作数据可以是由调整部75压缩了数据量的动作数据(压缩动作数据),也可以是由获取部74获取到的动作数据。关于监视模型的生成方法的详情,在后文说明。
[0052]
判断部77具有判断输送装置10的状态的功能。判断部77基于将评价数据输入监视模型而得到的输出数据(第一输出数据),判断驱动机构的状态,其中评价数据来自于在输送装置10的评价时由获取部74获取到的动作数据。评价时是指,例如在操作员等不能掌握输送装置10的状态等的状态下,在基片处理装置2中继续进行晶片w的处理的状态。评价数据可以是由调整部75压缩了数据量后的动作数据(压缩动作数据),也可以是由获取部74获取到的动作数据。关于判断部77的判断方法,在后文说明。判断部77将判断结果输出到存储部72。
[0053]
判断部78具有基于在规定期间在存储部72中所存积的判断部77的判断结果,判断输送装置10接近异常状态的程度的功能。关于判断部78的判断方法,在后文说明。判断部78将判断结果输出到输出部79。
[0054]
输出部79具有将判断部78的判断结果输出的功能。输出部79例如也可以对控制器60内的其它要素输出表示判断结果的信号,也可以对控制器60外输出表示判断结果的信号。输出部79也可以输出作为表示判断结果的信号的、表示输送装置10接近异常状态的信号(以下称为“警告信号”。)。控制器60在输出了警告信号的情况下,可以使由输送装置10进行的输送动作暂时停止,也可以使基片处理装置2中的对晶片w的处理暂时停止。或者,基片处理装置2还包括通知部(未图示),通知部在从输出部79接收了警告信号时,通知操作员等输送装置10接近异常状态。
[0055]
控制器60的硬件例如由一个或者多个控制用的计算机构成。控制器60作为硬件上的构成,例如具有图4所示的电路81。电路81可以由电路器件(circuitry)构成。电路81具体而言具有处理器82、内存83(存储部)、存储器84(存储部)和输入输出端口85。处理器82与内存83和存储器84中的至少一者协作地执行程序,执行经由输入输出端口85的信号的输入输出,由此构成上述的各功能模块。输入输出端口85在处理器82、内存83和存储器84与基片处理装置2的各种装置(输送装置10)之间进行信号的输入输出。
[0056]
在本实施方式中,基片处理系统1具有一个控制器60,但也可以具有由多个控制器60构成的控制器组(控制部)。在基片处理系统1具有控制器组的情况下,上述的功能模块可以分别由一个控制器60实现,也可以由2个以上的控制器60的组合来实现。控制器60由多个计算机(电路81)构成的情况下,上述功能模块可以分别由一个计算机(电路81)实现,也可以由2个以上的计算机(电路81)的组合来实现。控制器60可以具有多个处理器82。在该情况下,上述功能模块可以分别由一个或者多个处理器82来实现。
[0057]
[状态判断方法]
[0058]
下面,参照图5,对判断输送装置10的状态的方法进行说明。
[0059]
首先,控制器60基于驱动部33正常动作时的动作数据,生成驱动部33的监视模型(图5的步骤s10)。接着,控制器60使用所生成的监视模型,基于驱动部33的评价时的动作数据,监视驱动部33的状态(图5的步骤s20)。控制器60可以反复执行步骤s20的处理。进行步骤s10中的处理的阶段为“学习阶段”,继续步骤s20中的处理的阶段为“监视(评价)阶段”。
[0060]
[监视模型的生成方法]
[0061]
下面,参照图6~图12,对步骤s10中的监视模型的生成方法更详细地进行说明。该监视模型的生成例如可以在不进行基于基片处理装置2的晶片w的处理时进行。此外,在由操作员判断为驱动部33的状态正常时,可以进行监视模型的生成。
[0062]
首先,状态判断部70获取驱动部33正常动作时的动作数据(图6的步骤s11)。在步骤s11中,首先,指示部73通过控制电动机33f,使臂34沿着箭头d2方向进行一次动作。接着,获取部74将按规定的采样周期对该动作中的扭矩的时间变化进行采样得到的扭矩信号作为动作数据来获取。获取部74可以将根据指示部73对电动机33f的电流指令值得到的扭矩信号作为动作数据来获取,也可以将根据设置于电动机33f的扭矩传感器的检测结果得到的扭矩信号作为动作数据来获取。图7中,将由获取部74得到的动作数据的一例作为动作数据t1表示。在该例子中,动作数据t1的数据量为136个。即,动作数据t1由136个离散值表示。获取部74将获取到的动作数据输出到调整部75。
[0063]
接着,状态判断部70调整由获取部74获取到的动作数据(图6的步骤s12)。在步骤s12中,调整部75将动作数据的数据量调整成一定数量。调整部75例如也可以通过对动作数据进行离散傅立叶变换和离散傅立叶逆变换,生成压缩动作数据。图7中,将由调整部75生成的压缩动作数据的一例作为压缩动作数据t2表示。在该例子中,通过将动作数据t1的136个数据量调整为128个数据量(压缩),生成压缩动作数据t2。横轴的采样计数与时间相对应,如图7所示,压缩动作数据t2成为在时间轴(纸面横向)上将动作数据t1压缩了的波形。调整部75将所生成的压缩动作数据输出到存储部72。正常动作时得到的压缩动作数据,被用作生成监视模型时的学习用数据(正常动作数据)。
[0064]
接着,状态判断部70判断由调整部75生成的正常动作数据的个数是否达到了预先设定的数量(以下称为“收集数量”。)(图6的步骤s13)。在判断为正常动作数据的个数没有达到收集数量的情况下(步骤s13:否),状态判断部70反复进行步骤s11、s12。这时,状态判断部70使驱动部33反复进行相同的动作,以获取多个正常动作数据。状态判断部70例如使在驱动部33中反复进行将晶片w送入处理单元3a(处理单元3b)时的动作,或者从处理单元3a将晶片w送出时的动作。
[0065]
由此,多个(例如600~1800个)正常动作数据作为学习用数据组被存储在存储部72中。也可以为,状态判断部70对于传动带33e的张力(振动频率)被设定为彼此不同的值的各情况,将多个学习用数据组存储在存储部72中。例如,也可以为,学习用数据组包括:与张力对应的振动频率为140hz的情况下获取到的200~600个正常动作数据;振动频率为130hz的情况下获取到的200~600个正常动作数据;和振动频率为120hz的情况下获取到的200~600个正常动作数据。
[0066]
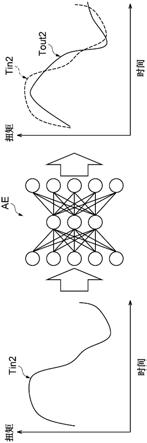
在判断为学习用数据组中包含的正常动作数据的数量达到了收集数量的情况下(步骤s13:是),状态判断部70基于所存积的学习用数据组生成监视模型ae(参照图8)(图6的步骤s14)。该监视模型ae为基于驱动部33的特性的模型,用于判断该驱动部33的状态。在步骤s14中,模型生成部76基于学习用数据组内的多个正常动作数据,通过进行机器学习,生成与驱动部33的特定动作对应的监视模型。
[0067]
模型生成部76通过使用作为一种神经网络的自动编码器(autoencoder)的机器学习,基于学习数据组中包含的多个正常扭矩信号生成监视模型ae。通过使用自动编码器的机器学习生成具有中间层的模型,该中间层为相对于一定数据量的输入数据,相同数据量的输出数据输出与输入数据相同值这样的层。该模型的中间层中,包括从输入数据使特征量依次降维并使之依次复原的多个层。在由调整部75调整的数据量例如为128个的情况下,生成输入128个数据而得到128个输出数据这样的监视模型ae。模型生成部76将所生成的监
视模型ae输出到存储部72。
[0068]
图8表示正常动作数据tin1被输入到监视模型ae的情况下得到的输出数据的例子。由于监视模型ae是基于正常动作数据生成的模型,因此当对监视模型ae输入正常动作数据tin1时,从监视模型ae输出接近正常动作数据tin1的波形的输出数据tout1。另一方面,图9表示驱动部33不是正常状态的情况下的压缩动作数据tin2被输入监视模型ae时得到的输出数据的例子。在该情况下,从监视模型ae输出相对于压缩动作数据tin2的波形偏离较大的输出数据tout2。即,利用在驱动部33接近异常的情况下,从监视模型ae输出的输出数据相对于对监视模型ae输入的输入数据的误差(偏离)变大这一点,能够判断驱动部33的状态。
[0069]
接着,状态判断部70(判断部78)在监视模型ae中计算容许误差ea(图6的步骤s15)。在此,虽然监视模型ae是基于正常动作数据而生成的,但是即使再次输入相同的正常动作数据,也不能输出与输入数据完全一致的输出数据。即,在正常动作数据为输入数据的情况下,在输入数据与输出数据之间可能产生由监视模型ae自身引起的误差(偏离)。因此,在本实施方式中,状态判断部70将由监视模型ae自身引起的误差作为容许误差ea来计算。在步骤s15中,首先,模型生成部76将学习用数据组中包含的多个正常动作数据分别输入监视模型ae,将输入数据与输出数据(第二输出数据)之间的差分作为误差eb(第一误差)来计算。
[0070]
图10表示误差eb的计算结果的一例。在图10中,作为一例,在输入到监视模型ae的正常动作数据为10个的情况下,“编号(tick no)”作为一例表示了111~114的误差eb的计算结果。在此,“编号”与图7中所示的采样计数值对应,例如“编号”为111的情况下,表示第111个数据。以下将“编号”为1~128的数据分别称为“第1数据~第128数据”来进行说明。
[0071]
也可以为,判断部78在学习用数据组中包含的全部或者一部分正常动作数据中,分别计算第1数据~第128数据的误差eb。也可以为,模型生成部76基于误差eb计算由监视模型ae自身引起的容许误差ea。模型生成部76将参数μ1、σ1分别设为
[0072]
μ1:误差eb的平均值
[0073]
σ1:误差eb的标准偏差
[0074]
时的μ1±
3σ1的范围设定作为容许误差ea。判断部78将计算出的容许误差ea存储在存储部72中。
[0075]
接着,控制器60计算偏差率da(第一偏差率)的阈值th1(图6的步骤s16)。偏差率da是表示在评价时驱动部33接近异常状态的程度的指标。阈值th1表示对象的驱动机构接近异常状态。在此,在说明了偏差率的算出方法之后,对偏差率da的阈值th1的计算方法的具体例进行说明。
[0076]
在步骤s16中,判断部77对于多个正常动作数据,分别按第1数据~第128数据的每一者,计算误差eb与容许误差ea的差分作为修正误差ec。如果误差eb的值包含在容许误差ea的范围内,则判断部77可以将修正误差ec计算为0。如果误差eb的值在容许误差ea的范围外,则判断部77可以计算容许误差ea的上限值或下限值与误差eb的值的差分作为修正误差ec。
[0077]
图11的(a)表示误差eb和容许误差ea的计算结果的一例。图11的(a)中,误差eb的值用黑色圆点表示,容许误差ea的范围用竖实线表示。在图11的(a)所示的例中,对于第7数
据~第9数据,误差eb在容许误差ea的范围外,对于第10数据~第12数据,误差eb在容许误差ea的范围内。图11的(b)将图11的(a)所示的误差eb与容许误差ea的差分(修正误差ec)的计算结果作为一例表示。对于第7数据~第9数据,由于误差eb在容许误差ea的范围外,因此修正误差ec不为0。另一方面,对于第10数据~第12数据,由于误差eb在容许误差ea的范围内,因此修正误差ec为0。
[0078]
也可以为,判断部77基于第1数据~第128数据各自的修正误差ec,对于多个正常动作数据实施计算学习用的偏差率dr(第二偏差率)的处理。也可以为,判断部77例如对多个正常动作数据实施如下处理,即将计算第1数据~第128数据的修正误差ec(误差eb与容许误差ea的差分)的均方根误差(rmse:root mean squared error)得到的值作为学习用的偏差率dr来计算的处理。基于误差eb与容许误差ea的均方根误差,能够通过按每个正常动作数据,计算对第1数据~第128数据各自的修正误差ec的平方值求取平均而得到的平均值的平方根来得到。
[0079]
图12表示学习用数据组的偏差率dr的计算结果的一例。图12中,学习用的偏差率dr的计算结果由“箱形图”表示。图12中表示了基于学习用数据组的偏差率dr的计算结果,因此表示四分位范围的箱被描绘在偏差率dr为0附近,该箱成为用眼不能观察到的状态。判断部77对于评价时使用的偏差率da的阈值th1,将参数σ2设为
[0080]
σ2:基于误差eb与容许误差ea的比较而得到的、与容许误差ea的学习用的偏差率dr的标准偏差时,利用
[0081]
th1=3σ2[0082]
可以计算阈值th1。判断部77将该阈值th1输出到存储部72。
[0083]
[输送装置的状态监视方法]
[0084]
下面,参照图13,对图5所示的步骤s20中的驱动部33的状态监视方法更详细地进行说明。该驱动部33的状态监视例如可以在由基片处理装置2处理晶片w时继续进行。
[0085]
首先,状态判断部70获取驱动部33的评价时的动作数据(图13的步骤s21)。在步骤s21中,指示部73与基片处理装置2中的晶片w的处理同步(相应)地控制电动机33f,由此使臂34沿着箭头d2方向进行一次动作。接着,获取部74将按规定的采样周期对该动作中的扭矩的时间变化进行采样得到的扭矩信号(评价扭矩信号)作为动作数据来获取。该步骤s21除了不明确驱动部33的状态是否正常这一点以外,与步骤s11同样地进行。获取部74将获取到的动作数据输出到调整部75。
[0086]
接着,状态判断部70调整由获取部74获取到的动作数据(图13的步骤s22)。在步骤s22中,与步骤s12同样地,调整部75将动作数据的数据量调整成一定数量(例如128个),来生成压缩动作数据。调整部75将所生成的压缩动作数据输出到判断部77。将评价时得到的压缩动作数据,作为用于判断驱动部33的状态的评价用的数据(评价数据)使用。
[0087]
接着,状态判断部70基于由调整部75生成的评价数据计算偏差率da(图13的步骤s23)。在步骤s23中,判断部77基于在存储部72中存储的监视模型ae计算偏差率da。首先,判断部77例如可以计算出将评价数据输入监视模型ae而得到的输出数据与所输入的评价数据之间的误差ed(第二误差)。然后,判断部77通过将误差ed与监视模型ae的容许误差ea进行比较来计算偏差率da。该偏差率da可以与在步骤16中的偏差率dr的计算同样地,通过计算基于误差ed和容许误差ea的(将误差ed和容许误差ea进行了比较而得的)均方根误差来
求取。基于误差ed和容许误差ea的均方根误差,通过按每个评价数据,计算对第1数据~第128数据各自的误差ed与容许误差ea的差分的平方值求取平均得到的平均值的平方根来获得。
[0088]
接着,状态判断部70基于计算出的偏差率da进行判断作为对象的驱动机构的状态的一次判断(图13的步骤s24)。在步骤s24中,判断部77可以基于偏差率da是否超过了存储于存储部72的阈值th1,判断作为对象的驱动机构的状态。判断部77可以将偏差率da是否超过了阈值th1的判断结果输出到存储部72。
[0089]
接着,状态判断部70判断从开始驱动部33的监视起是否经过了规定期间(图13的步骤s25)。在判断为没有经过规定期间的情况下(步骤s25:否),状态判断部70反复进行步骤s21~步骤s25。由此,在存储部72中存储在规定期间将基于偏差率da的驱动部33的状态的判断结果存积而得的数据组(以下称为“判断数据组”。)。存储部72可以存储有规定期间,规定期间例如也可以由操作员预先设定。作为规定期间,例如可以设定为1小时、数小时、半日、1日或者1周等。
[0090]
在判断为经过了规定期间的情况下(步骤s25:是),状态判断部70进行基于判断数据组判断驱动部33接近异常状态的程度的2次判断(图13的步骤s26)。在步骤s26中,例如判断部78基于判断数据组中的偏差率da超过阈值th1的数据的比例(以下称为“数据比例”。),判断驱动部33接近异常状态的程度。数据比例为,在规定期间中,相对于由判断部77判断的全部判断次数,判断为超过了阈值th1的判断结果的数量的比例。
[0091]
也可以为,在数据比例超过了预先设定的阈值th2的情况下,判断部78判断为对象的驱动机构接近异常状态。阈值th2可以由操作员等设定为任意的值,也可以在70%~100%的范围内设定,也可以在80%~100%的范围内设定,还可以在90%~100%的范围内设定。判断部78将判断结果输出到输出部79。
[0092]
接着,状态判断部70输出判断结果(图13的步骤s27)。在步骤s27中,输出部79例如也可以将表示作为对象的驱动机构接近异常状态的信号(警告信号),作为表示判断结果的信号输出。
[0093]
[验证结果]
[0094]
下面,参照图14和图15,对与使用监视模型的输送机构的判断有关的验证结果进行说明。图14表示在驱动部33的传动带33e具有彼此不同的张力的情况下,基于验证用的多个(500个)正常动作数据,使用监视模型ae计算出偏差率da的结果。
[0095]
在图14所示的例子中,分别计算出使与输送机构的传动带33e的张力对应的振动频率在140hz~60hz的范围内按10hz为单位变化的情况下的偏差率da。表明振动频率越小,张力越降低。并且,表明张力越降低,输送机构的传动带33e越劣化。图14中,将每个张力(振动频率)的偏差率da的计算结果的分布表示为箱形图。根据图14所示的计算结果可知,张力越降低,偏差率da的最大值越上升,由箱表示的四分位范围中包含的偏差率da上升。
[0096]
图15表示在与图14所示的偏差率da的验证结果相同的条件下,偏差率da超过阈值th1的比例即数据比例。如图15所示,在振动频率为90hz以下的情况下,数据比例成为75%以上,在振动频率为80hz以下的情况下,数据比例成为90%以上。由于振动频率(张力)越降低而驱动部33越接近异常状态,因此例如通过将阈值th2设定为75%,能够由判断部78判断为驱动部33接近异常状态。或者,通过将阈值th2设定为90%,能够由判断部78判断为驱动
部33接近异常状态。
[0097]
[作用]
[0098]
依照以上的例子,基于输出数据来判断输送装置10的状态,该输出数据是将来自于评价输送装置10时由获取部获取到的动作数据的评价数据输入监视模型而得到的。在该情况下,在对通过使用自动编码器的基于正常动作数据的机器学习而生成的监视模型,输入了正常动作数据的情况和输入了输送装置10的异常动作时的动作数据的情况下,能够输出相差较大的值。因此,基于来自监视模型的第一输出数据,能够简单且高精度地判断输送装置10的状态。
[0099]
依照以上的例子,判断部77执行基于正常动作数据与将正常动作数据输入监视模型而得到的输出数据之间的误差eb,获取容许误差ea的处理(步骤s15)。此外,判断部77执行:通过将评价数据和输出数据之间的误差ed与容许误差ea进行比较,获取与容许误差ea的偏差率da的处理;以及基于该偏差率da判断输送装置10的状态的处理(步骤s24)。
[0100]
在该情况下,通过使用自动编码器的机器学习,能够以正常动作数据与从输入了该正常动作数据的监视模型输出的输出数据的误差变得非常小的方式,生成该监视模型。换言之,当将输送装置10的异常动作时的动作数据输入该监视模型时,异常动作时的该动作数据与来自该监视模型的输出数据的误差变大。因此,能够简单且高精度地判断输送装置10的状态。
[0101]
依照以上的例子,容许误差ea为μ1±
3σ1的范围。在该情况下,将正常动作数据中可能包含的异常值除去后的范围成为容许误差。通过用这样的容许误差与误差ed进行比较,能够从误差ed所包含的值中高精度地区分出作为误差较大的值。因此,能够更准确地判断输送装置10的异常动作。
[0102]
依照以上的例子,评价时的偏差率da为,基于评价时的误差ed和容许误差ea计算均方根误差而得到的值。在该情况下,该偏差率da表示评价数据作为整体从容许误差偏离了何种程度。通过基于这样的偏差率da判断输送装置10的状态,能够进一步提高异常判断的准确性。
[0103]
依照以上的例子,基于评价时的偏差率da判断输送装置10的状态的处理,包括基于该偏差率da是否超过了规定的阈值th1来进行判断的处理。在该情况下,通过将偏差率da与阈值th1进行比较这样非常简单的方法,能够判断输送装置10的状态。
[0104]
依照以上的例子,阈值th1是根据3σ2求取的值。通过使用这样的阈值th1与评价时的偏差率da进行比较,能够高精度地区分出得到的该偏差率之中超过了正常动作数据可固有的偏差率的部分。因此,能够更准确地判断输送装置10的异常动作。
[0105]
依照以上的例子,也可以为,学习时的偏差率dr是基于正常动作时的误差eb和容许误差ea计算均方根误差而得到的值。在该情况下,正常动作时的偏差率dr表示正常动作时的误差eb作为整体从容许误差ea偏离了何种程度。通过使用基于这样的正常动作时的偏差率dr得到的阈值th1来判断输送装置10的状态,能够进一步提高异常判断的准确性。
[0106]
依照以上的例子,还包括:存储部72,其存储在规定期间将基于评价时的偏差率da的输送装置10的状态的判断结果存积而得的数据组;和判断部78,其基于数据组之中偏差率da超过规定的阈值th1的数据的比例,判断输送装置10接近异常状态的程度。在该情况下,基于判断部78的判断结果,能够掌握输送装置10的维护时期。
[0107]
依照以上的例子,包括调整部75,其将由获取部74获取到的动作数据的数据量调整成一定数量。在该情况下,能够简便地执行之后的数据处理。
[0108]
依照以上的例子,输送装置10包括支承晶片w的臂34和使臂34动作的电动机33f,获取部74获取电动机的扭矩信号作为动作数据。在该情况下,能够使用可容易地获取的扭矩信号作为输送装置10的动作数据,来判断输送装置10的异常动作。
[0109]
[变形例]
[0110]
本说明书中公开的全部的内容均为例示,而不应该认为是限定性的内容。在不脱离权利要求及其主旨的范围内,能够对以上的例子进行各种省略、替换、改变等。
[0111]
(1)由状态判断部70进行状态判断的对象,可以是在输送装置10的箭头d1方向上输送晶片w的保持部30。或者,状态判断的对象也可以是驱动旋转轴32的驱动机构,还可以是使臂34沿着上下方向移动的机构。
[0112]
(2)状态判断部70也可以不包括判断部78。在该情况下,状态判断部70可以基于输送机构的一动作中的评价时的偏差率da,仅进行一次判断。状态判断部70可以仅将一次判断结果存储在存储部72中,可以输出一次判断结果。
[0113]
(3)容许误差ea不限于上述的例子。容许误差ea例如可以为μ1±
2σ1的范围,也可以为μ1±
σ1的范围,还可以为μ1±
n
×
σ1的范围(n为任意的数)。
[0114]
(4)阈值th1不限于通过上述的例子求取的值。阈值th1也可以是通过n1
×
σ2(n1为任意的正数)求取的值。
[0115]
(5)状态判断部70(状态判断装置)也可以收纳在与控制器60不同的壳体中,作为与控制器60不同的计算机(电路)构成。状态判断部70也可以由能够从外部与基片处理装置2连接的计算机或者伺服装置构成。像这样,状态判断部70不需要与基片处理装置2或者控制器60一体地构成,可以根据需要作为能够通过有线或者无线进行通信连接的外部装置来实现。
[0116]
(6)模型生成部76也可以由与控制器60不同的其它控制器实现。例如,与基片处理装置2分体的伺服装置等也可以具有该其它控制器。在该情况下,也可以为,控制器60通过在其与该其它控制器之间经由网络等规定的通信方式进行通信,得到由该其它控制器的模型生成部76生成的监视模型。
[0117]
[其它例子]
[0118]
例1.本发明的一个例子的状态判断装置(70),判断构成为能够在基片处理装置(2)中保持基片(w)并且使之动作的驱动机构(10)的状态。该状态判断装置(70)包括:构成为能够获取驱动机构(10)的动作数据的获取部(74);模型生成部(76),其构成为能够基于正常动作数据,执行使用自动编码器的机器学习,来生成驱动机构(10)的监视模型,其中,该正常动作数据来自于在驱动机构(10)的正常动作时由获取部(74)获取到的动作数据;和第一判断部(77),其构成为能够基于将评价数据输入监视模型而得到的第一输出数据,判断驱动机构(10)的状态,其中该评价数据来自于在驱动机构(10)的评价时由获取部(74)获取到的动作数据。在该情况下,在对通过使用自动编码器的基于正常动作数据的机器学习而生成的监视模型,输入了正常动作数据的情况和输入了驱动机构的异常动作时的动作数据的情况下,能够输出相差较大的值。因此,基于来自监视模型的第一输出数据,能够简单且高精度地判断驱动机构的状态。
[0119]
例2.在例1的装置中,也可以为第一判断部(77)执行如下处理:基于正常动作数据与将正常动作数据输入监视模型而得到的第二输出数据之间的第一误差(eb),获取容许误差(ea)的处理;通过将评价数据和第一输出数据之间的第二误差(ed)与容许误差(ea)进行比较,获取与容许误差(ea)的第一偏差率(da)的处理;基于第一偏差率(da)判断驱动机构(10)的状态的处理。在该情况下,通过使用自动编码器的机器学习,以正常动作数据与从输入了该正常动作数据的监视模型输出的输出数据的误差变得非常小的方式,生成该监视模型。换言之,当将驱动机构的异常动作时的动作数据输入该监视模型时,异常动作时的该动作数据与从该监视模型输出的输出数据的误差变大。因此,能够简单且高精度地判断驱动机构的状态。
[0120]
例3.在例2的装置中,也可以为,将参数μ1、σ1分别设为:
[0121]
μ1:第一误差(eb)的平均值
[0122]
σ1:第一误差(eb)的标准偏差
[0123]
时,容许误差(ea)为μ1±
3σ1的范围。在该情况下,将正常动作数据中可能包含的异常值除去了的范围成为容许误差。通过使用这样的容许误差与第二误差进行比较,能够从第二误差所包含的值中高精度地区分出作为误差较大的值。因此,能够更准确地判断驱动机构的异常动作。
[0124]
例4.在例2或者例3的装置中,也可以为第一偏差率是基于第二误差和容许误差计算均方根误差(rmse)而得到的值。在该情况下,第一偏差率表示评价数据作为整体从容许误差偏离了何种程度。通过基于这样的第一偏差率判断驱动机构的状态,能够进一步提高异常判断的准确性。
[0125]
例5.在例2~例4中的任一装置中,也可以为,基于第一偏差率(da)判断驱动机构(10)的状态的处理,包括基于第一偏差率(da)是否超过了规定的阈值(th1)来进行判断的处理。在该情况下,通过将第一偏差率与阈值进行比较这样非常简单的方法,能够判断驱动机构的状态。
[0126]
例6.例5的装置中,也可以为,将参数σ2设为
[0127]
σ2:基于第一误差(eb)与容许误差(ea)的比较而获得的、与容许误差(ea)的第二偏差率(dr)的标准偏差
[0128]
时,阈值(th1)是根据3σ2来求取的值。通过使用这样的阈值与第一偏差率进行比较,能够高精度地区分出得到的第一偏差率之中超过正常动作数据可固有的偏差率的部分。因此,能够更准确地判断驱动机构的异常动作。
[0129]
例7.在例6的装置中,也可以为,第二偏差率(dr)是基于第一误差(eb)和容许误差(ea)计算均方根误差(rmse)而得到的值。在该情况下,第二偏差率表示第一误差作为整体从容许误差偏离了何种程度。通过基于使用这样的第二偏差率得到的阈值判断驱动机构的状态,能够进一步提高异常判断的准确性。
[0130]
例8.在例5~例7中的任一装置中,也可以为,还包括:存储部(72),其构成为能够存储在规定期间将基于第一偏差率(da)的驱动机构(10)的状态的判断结果存积而得的数据组;和第二判断部(78),其构成为能够基于数据组之中第一偏差率(da)超过规定的阈值(th1)的数据的比例,判断驱动机构(10)接近异常状态的程度。在该情况下,基于第二判断部的判断结果,能够掌握驱动机构的维护时期。
[0131]
例9.在例1~例8中的任一装置中,也可以为,还包括调整部(75),其构成为能够将由获取部(74)获取到的动作数据的数据量调整成一定数量,正常动作数据为用调整部(75)将在驱动机构(10)的正常动作时由获取部(74)获取到的动作数据的数据量调整成一定数量而得到的数据,评价数据为用调整部(75)在将驱动机构(10)的评价时由获取部(74)获取到的动作数据的数据量调整成一定数量而得到的数据。该情况下,能够简便地执行之后的数据处理。
[0132]
例10.在例1~例9中的任一装置中,也可以为,驱动机构(10)包括支承基片(w)的支承部件(21)和使支承部动作的电动机(33f),获取部(74)构成为能够获取电动机(33f)的扭矩信号作为动作数据。在该情况下,能够使用可容易地获取的扭矩信号作为驱动机构的动作数据,来判断驱动机构的异常动作。
[0133]
例11.本发明的其它例的状态判断方法包括:基于正常动作数据执行使用自动编码器的机器学习,来生成驱动机构(10)的监视模型的步骤,其中,正常动作数据来自于构成为能够保持基片(w)并使之动作的驱动机构(10)正常动作时的动作数据;和基于将评价数据输入监视模型而得到的第一输出数据,判断驱动机构的状态的步骤,其中,评价数据来自于驱动机构(10)的评价时的动作数据。在该情况下,能够得到与例1同样的作用效果。
[0134]
例12.本发明的其它例的计算机可读取的存储介质,存储有用于使状态判断装置(70)执行例11的方法的程序。在该情况下,能够得到与例11的方法同样的作用效果。在本说明书中,计算机可读取的存储介质包括非暂态的有形介质(non
‑
transitory computer recording medium:非暂时性计算机可读取存储介质)(例如,各种主存储装置或者辅助存储装置)、传播信号(transitory computer recording medium:暂时性计算机存储介质)(例如,能够经由网络提供的数据信号)。
[0135]
附图标记说明
[0136]2……
基片处理装置、10
……
输送装置、33
……
驱动部、34
……
臂、60
……
控制器、70
……
状态判断部、74
……
获取部、75
……
调整部、76
……
模型生成部、77、78
……
判断部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。