具有安全措施的机器人车辆
1.本发明涉及一种被操作用于在限定区域内移动的机器人车辆,其中,该车辆可以用于修剪草坪或用于农业目的,该机器人车辆具有在不平整表面上操作的操作部分。车辆的控制装置包括用于核查该车辆是否已经无意地离开其路径的安全器件以及确保该车辆不会进入受限区域的器件。
背景技术:
2.当自主移动车辆在其可能遇到生物的环境中操作时,确保安全是必要的。当车辆具有潜在地可能造成显著伤害的操作器件(比如,割草机的切割器)时,这是尤其重要的。当车辆是大型的、比如具有的尺寸与具有在米的范围内的长度和宽度的汽车、小型拖拉机等相当时,这更加重要。
3.可以通过从使用定位系统(gps、三角测量等)的车辆导航系统接收的数据来控制车辆以遵循限定的路径。然而车辆需要能够绕过路径上的预料之外的物体、例如放置在田野中的椅子或自行车、人等。从设定路径偏离是车辆可能“迷路”或刚好进入否则为受限的区域的一个示例。
技术实现要素:
4.因此,本发明的目的是引入一种额外的车辆安全控制装置。
5.该目的如权利要求中所指示的得以解决。这包括介绍一种控制机器人车辆的方法,该机器人车辆适于在被分为多个子区域的限定区域中操作,所述方法包括通过使用定位系统的车辆导航系统使车辆在这些子区域之间转向,其中,在所述车辆上定位有测量器件以测量该车辆的实际运行状况,其中,每个子区域与预期运行状况和允许运行状况相关联,该预期运行状况与根据通过所述车辆导航系统的转向来确认该车辆处于该预期区域中相关;当在所述子区域中时,该允许运行状况限制所述车辆的自主自由度。
6.在实施例中,该测量器件通过该位置识别系统与预期子区域相关联,其中,在该预期子区域的假设下与该预期运行状况进行对比以进行所述确认,并且如果它们不匹配,则指示某一错误并启用安全程序。然后,预期运行状况可以与实际测量值相关联以验证车辆的实际位置,并且对允许运行状况进行设定来降低车辆进入受限区域的风险。
7.在实施例中,所述位置识别系统独立于所述定位系统。这样确保了如果其中一个系统指示错误位置,而另一个系统可以是正确的。进一步,由于预期运行状况与每个子区域相关联,因此可以识别任何这样的错误位置指示。
8.在实施例中,该预期运行状况包括速度、方向和/或加速度,并且该允许运行状况包括所述车辆在所述子区域中的所允许的方向的范围。
9.在实施例中,将边界子区域和内子区域限定成边界子区域并不是所有边都与相邻的子区域接界,而内子区域的所有边都与相邻的子区域接界,并且其中,允许运行状况包括使在内子区域的最大允许速度比在边界子区域的最大允许速度更高。
10.在实施例中,边界子区域可以由其他边界子区域完全包围,使得这些边界子区域
可以将要从该允许的限定区域排除的障碍物完全包围起来。
11.在实施例中,该车辆的最大允许速度在这些子区域从最高允许速率内子区域朝向这些边界子区域逐渐降低。
12.在实施例中,该车辆的允许移动方向在这些子区域从最高允许速率内子区域朝向这些边界子区域逐渐减小,使得对会将该车辆引导朝向不与相邻的子区域接界的边的任何方向加以禁止。
13.在实施例中,所述车辆的允许运行状况与该车辆在其移动中与通过该车辆导航系统设定的方向不同的自主性相关。
14.在实施例中,所述允许运行状况与其中来自定位系统(和/或位置识别系统)的信号已知是微弱或不存在的子区域相关,并且对于这些子区域,允许运行状况包括通过与预期运行状况和允许运行状况相关联的测量值而允许车辆完全转向。
15.在实施例中,所述允许运行状况与影响该车辆的移动的不可预见事件相关,并且其中,该允许运行状况包括,持续给定的时间段地通过与预期运行状况和允许运行状况相关联的测量值而允许该车辆完全转向,从而从由该车辆导航系统设定的路线偏离。
16.在实施例中,当在所述子区域中时,将每个子区域的该预期运行状况与测量到的实际运行状况进行对比,如果在某一限定规则下该预期运行状况与测量到的实际运行状况彼此偏离,则启用安全程序。
17.解决方案进一步涉及一种机器人车辆,该机器人车辆适于在被分成多个子区域的限定区域中操作,其中,通过使用定位系统的车辆导航系统使该车辆在这些子区域之间转向,其中,在所述车辆上定位有测量器件以测量该车辆的实际运行状况,其特征在于,每个子区域与预期运行状况和允许运行状况相关联,该预期运行状况与根据所述车辆导航系统确认该车辆处于该预期区域中相关,当在所述子区域中时,该允许运行状况限制所述车辆的自主自由度。
18.该机器人车辆可以适于根据前述实施例中任一项所述的方法来操作。
附图说明
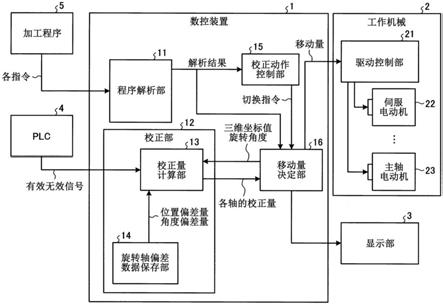
19.图1分别与定位系统和位置识别系统连通的机器人车辆。
20.图2展示了车辆操作的限定区域,其中,该区域被细分成子区域、并且包含静止的障碍物。
21.图3展示了九个子区域,每个子区域与预期运行状况和允许运行状况相关联。
22.图4边缘、或边界,即限定区域的与道路相邻的区段。
23.图5限定区域,示出了沿边界子区域的车辆路径。
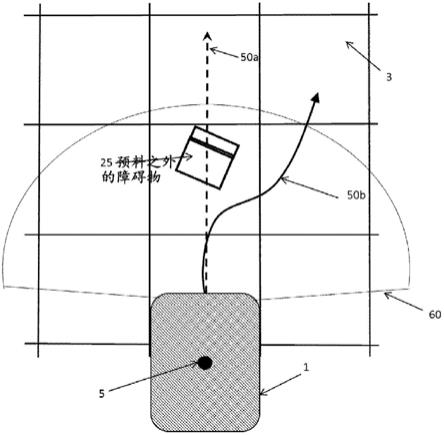
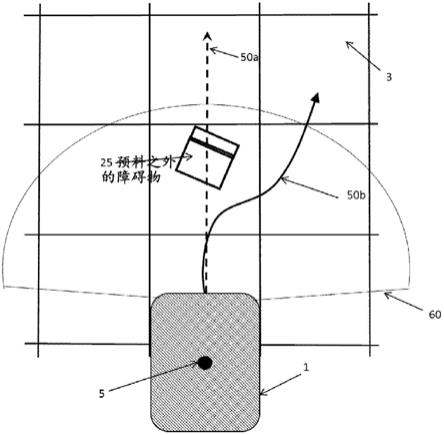
24.图6由于预料之外的障碍物而从设定路径偏离的机器人车辆。
具体实施方式
25.图1展示了通过使用位置识别系统(4a)的安全控制器和/或使用定位系统(4b)的车辆导航系统来操作的机器人车辆(1)。位置识别系统(4a)和定位系统(4b)分别可以是任何种类的、比如是卫星导航系统如gps、glonass、通过三角测量等。例如,这两个系统可以都是gps系统,可以一个是gps、另一个是三角测量等。
26.在一个实施例中,车辆导航系统是与安全控制器分开的系统,而在另一个实施例中,车辆导航系统和安全控制器集成到同一系统中。
27.在实施例中,机器人车辆(1)的方向或转向由车辆导航系统通过来自定位系统(4b)的位置识别信号来完成。识别车辆实际位置的安全测量由位置识别系统(4a)来完成。定位系统和位置识别系统在一个实施例中可以是两个独立的操作系统,而在其他实施例中可以是同一操作系统。所使用的车辆导航系统被定位成与车辆(1)进行数据交换、或被定位在车辆自身上,以基于定位系统(4b)输入而车辆(1)在指示路径上转向。这可以是基于车辆(1)操作开始之前或开始时设定的预定路径,或者可以基于时间或位置而间隔设定的新路径段。在本文的上下文中,这通过车辆导航系统和定位识别系统(4b)至少部分地形成车辆的转向。
28.然而,还允许车辆有一些自主运行状况,在车辆(1)偏离设定路径的情况下,或是再次进入设定路径,或是简单地基于新状况而设定的新路径段。这可能是因为要避开不可预见的障碍物。
29.图2展示了车辆(1)被布置成在其中操作的限定区域(2)。形成了虚拟地图,其被分成子区域(3),每个子区域与预期运行状况(7a)和允许运行状况(7b)相关联。
30.预期运行状况(7a)与根据定位系统(4b)确认车辆(1)沿设定路径处于预期子区域(3)中相关。
31.当在所述子区域(3)中时,允许运行状况(7b)与限制所述车辆(1)的自主运行状况的自由度相关,和/或与设定新路径段相关。
32.测量器件(5)被定位在所述车辆(1)上以测量车辆的实际运行状况(6)。测量器件(5)可以包括比如陀螺仪、加速度计、速度(或速率)传感器、车轮测程传感器等传感器,并且在车辆(1)所进入的一些或所有子区域(3)中进行一次或多次测量。当测量器件(5)被定位在车辆(1)上时,数据就表示了实际运行状况。在实施例中,来自测量器件(5)的测量值通过位置识别系统(4a)与预期子区域(3)相关联。在预期子区域(3)的假设下与预期运行状况(7a)进行对比,如果它们不相匹配,则指示某一错误并且启用安全程序。
33.子区域(3)的大小和形状可以不同。在一个实施例中,这些子区域由位于虚拟地图上的虚拟网格形成。它们可以延伸过比车辆(1)更小或更大的区域,并且在任一情况下,对车辆(1)的当前子区域(3)的识别可以与车辆(1)上的特定位置(比如测量器件(5)和/或车辆导航系统和/或安全控制器和/或如位置识别系统(4a)的信号接收器的位置)相关。
34.安全控制器的操作是通过来自位置识别系统(4a)的给出预期位置的输入的,并且基于该输入和相关联的预期运行状况7a与来自测量器件(5)的测量值进行对比以指示车辆(1)是否处于预期子区域(3)中。
35.图3展示了九个子区域(3),每个子区域与预期运行状况(7a.x)和允许运行状况(7b.x)(
‘
x’在图中为1
‑
9)相关联。
36.然后,对于子区域(3)中的每个子区域或一些子区域,安全控制器将所述子区域(3)的测量到的实际运行状况(6)与相关联的预期运行状况(6)(比如速度、方向和/或加速度等)进行对比。如果两者不同,则这就指示了车辆(1)实际上不在根据否则为预期的设定路径的(预期子区域(3)中的)预期位置。因此,启用安全程序,这可以简单地使车辆(1)停止,可能给出错误和停止指示。
37.另外,安全控制器通过对比实际子区域(3)中的允许运行状况(7b)来核查车辆(1)的运行状况,该允许运行状况可以包括所述车辆(1)在所述子区域(3)中所允许的方向和/或速度的范围。该允许运行状况还包括其组合、比如取决于移动方向的所允许的速度。这在图4中展示,其中,限定区域(2)的边缘部分被示出为边接至例如道路(10)等。至关重要的是车辆(1)不离开限定区域(2)进入道路(10),这可能是危险的。如果车辆(10)平行(30)于限定区域(2)的边缘而移动,则突然移动到道路(10)上的风险较低,并且因此,允许运行状况(7b)可以包括不对车辆速度进行限制,或允许车辆整体上相对于允许速度以可见的相对较高的速度移动。在垂直于或正(31)朝向边缘并且因此垂直于或正朝向道路(10)移动的情况下,如果相应地继续,则车辆将进入道路(10)。因此,在这种情况下,针对相同的子区域(3)的允许运行状况可以是允许显著降低的速度。
38.因此,在这个实施例中,可以通过相对于边缘的移动角度来调节允许速度。另外(或替代性地),可以取决于到边缘的距离,使得允许速度从到边缘的给定的距离开始逐渐降低。
39.在实施例中,将边界子区域(3a)和内子区域(3b)限定成边界子区域(3b)并不是所有边都与相邻的子区域(3)接界,而内子区域(3a)的所有边都与相邻的子区域(3)接界,并且其中,允许运行状况(7b)包括使在内子区域(3a)的最大允许速度比在边界子区域(3b)的最大允许速度更高。这例如在图5中展示,其中,在一个实施例中,以其中车辆(1)沿所允许的限定区域(2)的边界行驶(35a,35b)的初始化程序对边界子区域和内子区域进行限定或识别。然后将所经过的子区域(3)设置或识别为边界区域(3b),正如子区域(3b)与其他子区域(3b)相邻那样。这是沿外部边界完成(35a)的,而且也围绕任何内部已知静止障碍物(20)的边界来完成(35b)。然后,允许车辆(1)在该外部边界与该任何内部已知静止障碍物的边界之间移动。这种静止的障碍物(20)可以包括建筑物、树、植物、湖或针对车辆(1)的其他禁止区域。
40.图6展示了另一方面,其中传感器(60)在设定路径(50a)中检测到预料之外的物体(25)。然后,通过自主性,车辆导航系统使车辆(1)在对应的子区域(3b)的允许运行状况(7b)下沿新路径(50b)偏离。现在可以设定新路径(可能是路径(50b)),或者纠正车辆(1)使其回到设定路径(50a)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。