1.本发明涉及包括连接到传动轴的没有贯通轴的至少一个转子的机械系统。
2.本发明还涉及一种包括这种机械系统的电动压缩机(motocompresseur)。
背景技术:
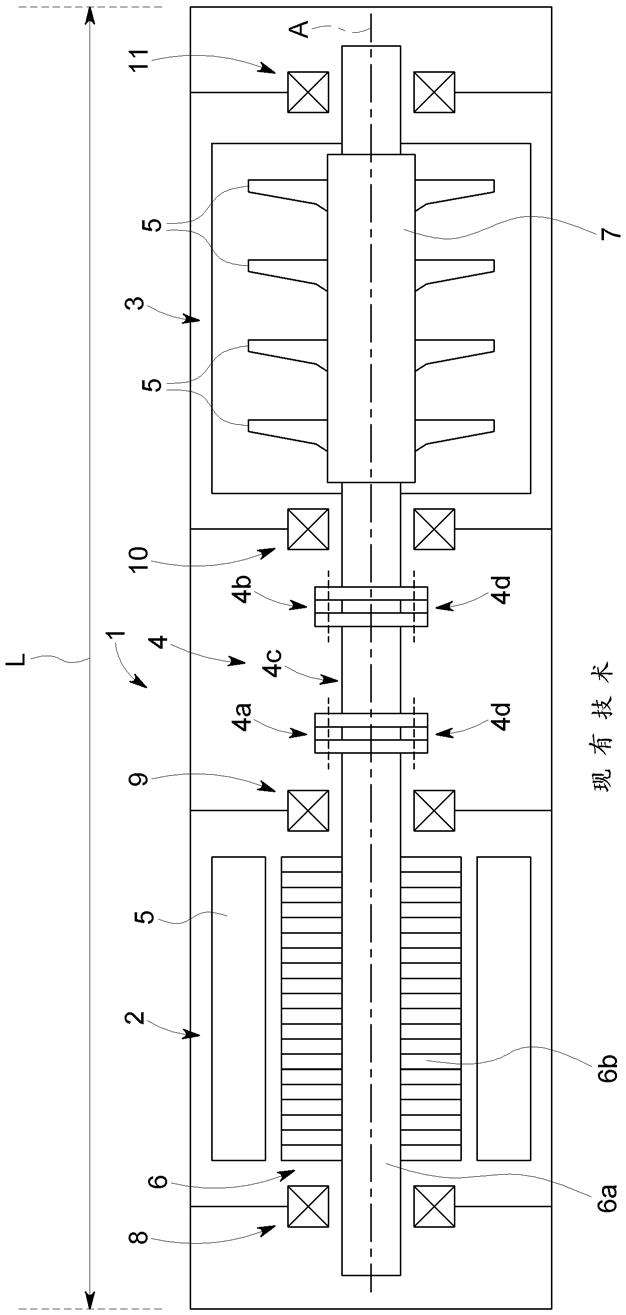
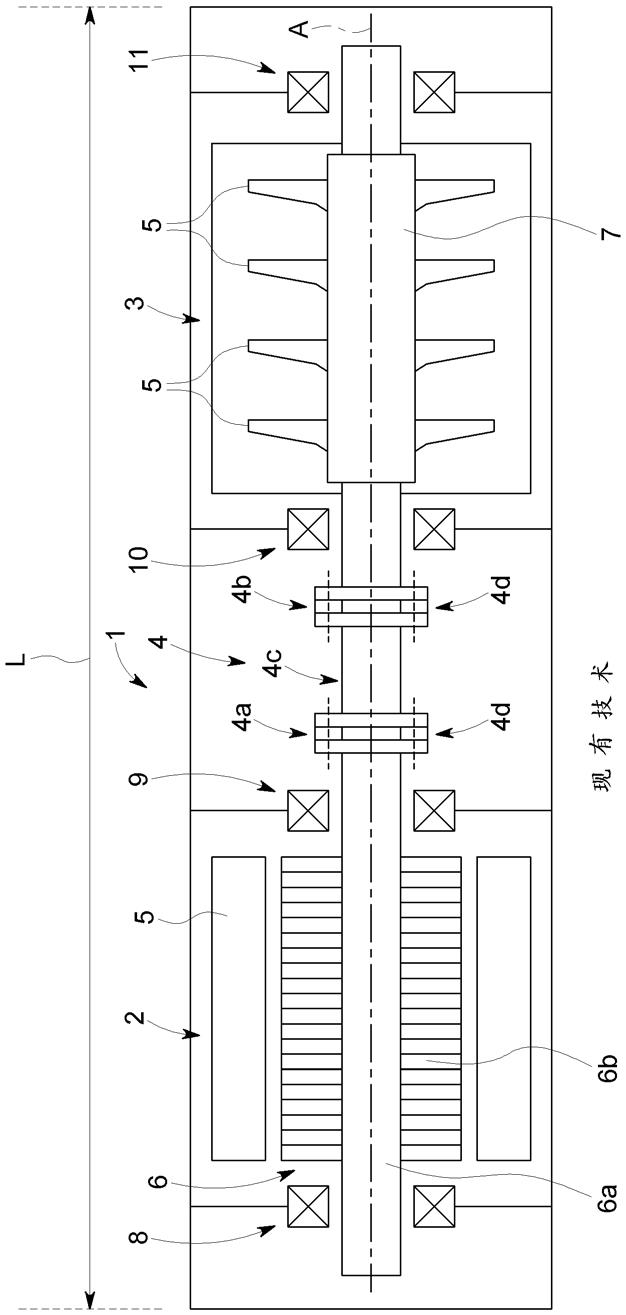
3.图1示出了包括根据现有技术的机械系统的电动压缩机1的示例,该机械系统包括旋转电动机2,该旋转电动机2通过挠性联接装置4连接到压缩部分3。
4.挠性联接装置4包括由轴4c连接的两个联接盘(tourteau)4a和4b。盘4a和4b设有挠性垫片4d。
5.旋转电动机2包括定子5,具有贯通轴的转子6插入定子5中,贯通轴包括穿过磁片6b并连接到盘4a的轴6a。
6.压缩部分3包括安装在该部分3的轴7上的压缩轮5。
7.部分3的轴7连接到联接盘4b。
8.轴承8和9保持电动机2的转子轴6a旋转,而轴承10和11保持部分3的轴7旋转。
9.挠性联接装置允许转子轴6a和压缩部分3的轴7的自身模式(mode propre)的分开。
10.还可以参考文献us7,144,226、us8,137,081、us3,874,823、gb282113和gb1068004,这些文献公开了一种电动压缩机,该电动压缩机包括将旋转电动机与压缩部分连接的挠性联接装置。
11.然而,挠性联接装置4增加了包括转子轴6a、挠性装置4和轴7的传动线的质量,并且增加了沿着电动压缩机1的旋转轴线a的长度l。
12.此外,轴承9和10的尺寸被设计成能支撑装置4的质量,从而进一步增加了电动压缩机1的质量和长度。
13.此外,挠性联接装置4会耗散热能,从而降低电动压缩机1的整体效率。
14.此外,在旋转电动机包括具有贯通轴的转子的情况下,转子的圆周速度被限制为200 m/s,以便限制磁片6b中的应力集中,应力集中在离心力作用下产生,且容易使转子损坏。转速的这种限制降低了电动压缩机的效率。
15.还可以参照文献wo2015/153081、us2012/0164005、ep1392981、ep1074746和us2002/0037772,它们公开了一种包括旋转电动机的电动压缩机,该旋转电动机包括具有贯通轴的转子,或者直接连接到压缩部分的轴的单件式转子。
16.由于转子是单件式的,它没有贯通轴。因此,转子速度不受限制。旋转电动机和压缩部分之间的直接连接允许省略图1所示的轴承(例如图1所示的轴承10)和挠性联接装置4。
17.单件式转子包括鼠笼,鼠笼由例如铜制成并直接插入由例如碳钢制成的转子中。
18.结果,鼠笼中感应的电流流过碳钢转子,导致转子的热能加热(“铁损”),降低了旋转机器的效率。
19.因此,建议减轻根据现有技术的机械系统的全部或部分缺点,特别是通过减小所述系统的质量和尺寸,通过增加所述系统中包含的旋转电动机的转速,以及通过增加所述系统的整体效率和功率。
技术实现要素:
20.鉴于上述情况,提出了一种用于旋转电动机的机械系统,旋转电动机包括至少一个转子和用于机械装置的至少一个传动轴。
21.转子具有非贯通轴,并且包括夹在形成转子轴的附加第一和第二压紧元件之间的圆柱形磁块,传动轴的一端直接连接到第一压紧元件。
22.根据一个特征,机械系统还包括用于机械装置的第二传动轴,第二传动轴直接连接到第二压紧元件。
23.根据另一个特征,机械系统还包括具有非贯通轴的第二转子,第二转子的第二压紧元件直接连接到传动轴的第二端。
24.优选地,第一和第二压紧元件的结构相同。
25.有利地,第一或第二压紧元件包括紧固凸缘,该紧固凸缘与磁块接触,并且由与第一或第二传动轴相同的材料制成。
26.根据一个特征,第一或第二压紧元件包括与磁块接触的紧固凸缘,第一或第二压紧元件的自由端包括联接套筒,第一或第二轴装配到联接套筒中,使得机械扭矩穿过传动轴之一和紧固凸缘。
27.优选地,第一或第二传动轴的一端包括第一联接盘,第一或第二压紧元件包括与磁块接触的紧固凸缘,第一或第二压紧元件的自由端包括与第一或第二传动轴的联接盘连接的第二联接盘,使得机械扭矩穿过传动轴之一和紧固凸缘。
28.根据一个特征,机械系统还包括连接紧固凸缘和第二联接盘的中轴。
29.有利地,机械系统还包括螺钉,每个螺钉穿过第一联接盘的平滑通孔并接合在第二联接盘的螺纹孔中,螺纹孔均匀分布在第二联接盘的嵌入直径(diam
è
tre d'implantation)上,且平滑通孔均匀分布在第一联接盘的嵌入直径上,第一和第二联接盘的孔的嵌入直径相等或基本相等。
30.优选地,机械系统还包括均匀分布在磁块直径上的拉杆,以保持磁块在两个压紧元件之间压紧,第一或第二压紧元件中拉杆的端部嵌入所述压紧元件中,拉杆的嵌入直径小于第一和第二压紧元件的嵌入直径。
31.根据一个特征,机械系统还包括均匀分布在磁块直径上的拉杆,以保持磁块在两个压紧元件之间压紧,第一或第二压紧元件中的拉杆的端部埋入所述压紧元件中,拉杆的嵌入直径等于或基本等于第一和第二盘的嵌入直径,螺纹孔与拉杆的嵌入孔交替。
32.根据又一个特征,第一盘具有中心盲孔,而第二盘具有装配到盲孔中的中心销,用于在第一和第二盘之间传递扭矩。
33.有利地,第一和第二盘包括均匀分布在相同直径上的盲孔,该系统还包括插入第一和第二盘的盲孔中的销,用于在第一和第二盘之间传递扭矩。
34.优选地,第一或第二压紧元件包括与磁块接触的紧固凸缘,第一或第二压紧元件的自由端包括中心通孔,第一或第二传动轴的一端装配到通孔中,使得机械扭矩穿过这些
轴之一和紧固凸缘。
35.根据另一方面,提出了一种电动压缩机,其包括如前所述的机械驱动系统,与转子相同数量的旋转电动机和与传动轴相同数量的机械装置,每个转子插入不同的电动机中,并且每个传动轴连接到包括压缩部分的不同机械装置。
附图说明
36.在阅读以下对本发明的实施例的描述时,本发明的其他特征和优点将会显现,这些实施例仅作为非限制性示例给出,并参考附图,其中:已经提到的图1示出了包括根据现有技术的机械系统的电动压缩机;图2示出了机械系统的第一实施例;图3示出了机械系统的第二实施例;图4示出了机械系统的第三实施例;图5示出了机械系统的第四实施例;图6示出了机械系统的第五实施例;图7示出了机械系统的第六实施例;图8和图9示出了压紧元件的第六实施例;图10和图11示出了压紧元件的第七实施例;图12和图13示出了压紧元件的第八实施例;图14和图15示出了压紧元件的第九实施例;和图16和图17示出了压紧元件的第十实施例。
具体实施方式
37.参考图2,图2示出了机械系统12的局部剖视图,机械系统12连接到电动压缩机14的第一实施例的压缩部分13,机械系统12集成在电动压缩机14中。
38.机械系统12包括转子15,转子15包括具有中心轴线b的非贯通轴,该非贯通轴直接连接到压缩部分13的传动轴16。
39.传动轴16的直径根据要传递的扭矩值来确定尺寸。
40.转子15和传动轴16通过分别位于转子15和传动轴16的自由端的两个轴承17和18保持旋转。
41.轴承17和18例如是油膜、气膜或磁支承轴承。
42.转子15插入鼠笼异步型旋转电动机20的定子19中。
43.作为变型,旋转电动机20可以是具有绕线转子的异步型或者同步型的电动机,优选地具有转子的给供电优选地通过环和电刷进行的绕线转子。
44.具有非贯通轴的转子15包括夹在形成转子轴的附加的第一压紧元件22和第二压紧元件23之间的圆柱形磁块21。
45.传动轴16的一端直接连接到第一压紧元件22。
46.第一压紧元件23和第二压紧元件24具有不同的结构。
47.根据第一实施例,第一压紧元件22具有紧固凸缘22a,该紧固凸缘22a与磁块21接触并与传动轴16一体成型。
48.紧固凸缘22a和传动轴16例如通过铸造或锻造来生产。
49.根据第二实施例,第二压紧元件23具有与磁块21接触的紧固凸缘23a和牢固地连接到紧固凸缘23a的自由表面的端轴23b。
50.磁块21包括两个短路盘24和25,这两个短路盘24和25围着压紧的磁片26和容纳在磁片26和短路盘24和25中的导体棒27,使得短路盘24和25以及导体棒27形成鼠笼。
51.磁片26的厚度优选小于2 mm,例如0.65 mm或0.5 mm。
52.作为变型,磁块21包括一叠金属板,金属板的厚度优选大于磁块21的外径的5%。
53.根据又一变型,磁块21包括单件钢制主体。
54.拉杆28均匀分布在磁块21的直径d上,以保持磁片26在压紧元件22和23之间压紧。
55.拉杆28穿过设置在压紧元件22和23中的平滑孔43b,并且在每一端包括螺母以保持磁片26压紧。
56.压缩部分13包括安装在传动轴16上的压缩轮28a,使得转子15驱动轮28a旋转以压缩气体。
57.由于转子15具有非贯通轴,所以转子15的圆周速度不限于200 m/s,从而允许提高电动机20的效率。转子15的转速越高,旋转电动机20产生的功率越大。
58.机械系统12在转子轴和传动轴16之间没有挠性联接装置,从而允许去除联接装置的保持轴承。
59.去除挠性联接装置和保持所述装置的轴承,允许提高机械系统12的机械动力传送(尤其是在转子15和压缩部分13之间)的整体效率。
60.此外,去除挠性联接装置和所述装置的保持轴承允许减小机械系统12的质量,并减小沿着机械系统12的轴线b的长度l1,从而允许降低机械系统的临界速度。
61.更准确地说,机械系统12可以以超临界转速旋转,超临界转速即大于或等于临界转速的一定倍数,例如临界速度的两倍或三倍。
62.由于机械系统12的长度l1比现有技术的机械系统的长度短,所以在运行速度范围内临界速度数量的减少有利于机械系统12的运行。
63.转子15可以以例如300 m/s的圆周速度旋转,从而提高机械系统12的能量效率。
64.此外,由于压紧元件22和传动轴16由相同的材料制成,由转子15传送到压缩部分13的最大扭矩高于由现有技术中已知的包括挠性装置的机械系统传送的最大扭矩。
65.根据实施例,机械系统12可以集成或联接到包括传动轴的任何机械装置。
66.作为未示出的变型,紧固凸缘22a包括螺纹孔以容纳拉杆28,且紧固凸缘23a包括埋头孔以容纳拉杆28另一端的螺母。
67.根据又另一变型,紧固凸缘22a包括埋头孔,该埋头孔容纳埋入紧固凸缘中并紧固到拉杆28的螺纹端上的螺母。
68.图3示出了集成在电动压缩机14的第二实施例中的机械系统12的第二实施例的局部视图。
69.可以看出,转子15包括夹在第一压紧元件22和第二压紧元件23之间的磁块21,压缩部分13包括传动轴16。
70.该实施例与图2所示的实施例的不同之处在于,第二压紧元件23的结构与第一压紧元件22相同。
71.第二压紧元件23包括直接连接到第二传动轴30的紧固凸缘23a,紧固凸缘23a和第二传动轴30由相同的材料制成。
72.第二传动轴30结合在与第一压缩部分13相同的第二压缩部分29中。
73.包含转子15的旋转电动机20的尺寸被设计成驱动两个压缩部分13和29。
74.一般来说,旋转电动机的效率对大功率电动机更好。
75.因此,对于相同的功耗,机械系统12具有比包括两个旋转电动机、每个旋转电动机驱动机械装置的系统更好的整体效率。
76.此外,使用单个旋转电动机允许减小机械系统12的尺寸和质量。
77.图4示出了集成在电动压缩机14的第三实施例中的机械系统12的第三实施例的局部视图。
78.可以看出转子15包括两个压紧元件22和23。
79.这个实施例不同于图2和图3中所示的先前的第一和第二实施例之处在于,它包括与转子15结构相同的第二转子31和机械装置32,第二转子31结合在与旋转电动机20结构相同的第二旋转电动机(未示出)中。
80.第二转子31包括磁块33,该磁块33具有与由第一和第二压紧元件35和34包围的转子15的磁块21相同的结构。
81.根据另一实施例,第二旋转电动机的构造可以不同于旋转电动机20的构造。
82.根据又另一实施例,第二转子31的磁块33的结构可以不同于转子15的磁块21。
83.磁块33可以例如包括取代磁片的厚板。
84.转子15和31的第二和第一压紧元件23和35的结构是相同的,第二压紧元件23包括与磁块21接触的紧固凸缘23a和牢固连接到紧固凸缘23a的自由表面的端轴23b,并且第一压紧元件35包括与磁块33接触的紧固凸缘35a和牢固连接到紧固凸缘35a的自由表面的端轴35b。
85.轴23b和35b的直径可以相同或不同。
86.机械装置32包括传动轴32a。
87.转子15的第一压紧元件22包括与磁块21接触并且由与传动轴32a的第一端相同的材料制成的紧固凸缘22a,并且转子31的第二压紧元件34具有与磁块33接触并且由与传动轴32a的第二端相同的材料制成的紧固凸缘34a。
88.根据另一个实施例,转子15和31的压紧元件可以具有不同的结构。
89.包括连接到传动轴32a的两个旋转电动机的机械系统12允许驱动不能被单个旋转电动机驱动的极高功率的机械装置32。
90.因此,与包括两个机械装置、每个机械装置都联接到旋转电动机的系统相比,机械系统12更加紧凑、具有减小的质量和更好的整体效率。
91.图3和图4中示出的机械系统因其紧凑性且因为减少的轴承数量,从而允许以超临界转速或临界转速的倍数旋转。
92.联接到机械装置32的两个直径较小的转子15和31允许以大于200 m/s,例如300 m/s的圆周速度旋转,提高了机械系统12的整体效率。
93.目前,详细描述了压紧元件22、23、34和35的附加实施例。
94.压紧元件22、23、34和35包括以下实施例中详述的结构之一,由此同一转子的第一
和第二压紧元件可以具有相同或不同的结构。
95.图5示出了机械系统12的第四实施例的局部视图,包括压紧元件22的第三实施例。
96.可以看到包括第一压紧元件22的转子15和传动轴16。
97.压紧元件22包括与磁块21接触的紧固凸缘22a。
98.压紧元件22的自由端包括联接套筒36,传动轴16接合到联接套筒36中,使得机械扭矩穿过传动轴16和紧固凸缘22a。
99.套筒36的内径和外径根据轴16的直径确定尺寸。
100.传动轴16牢固地连接在套筒36中,例如通过键合、套紧或拧入螺纹孔中。
101.根据另一实施例,轴16可以包括与套筒36内径周边上的花键配合的花键。
102.可以相互独立地生产包括套筒36的转子15和包括轴16的机械装置,然后将它们组装在一起。
103.这样允许以多个模块运输机械系统,例如包括电动机20的第一模块和包括压缩部分13的第二模块。
104.图6示出了机械系统12的第五实施例的局部视图,包括压紧元件22的第四实施例。
105.压紧元件22的这个实施例与图5所示的先前第三实施例的不同之处在于,紧固凸缘22a包括延伸到联接套筒36中的中心通孔37,限定了压紧元件22的第四实施例。
106.压紧元件22的第三和第四实施例允许实现传动轴16的更小的末端,使得例如通过使压缩轮28a能够安装在轴16的两端来方便压缩轮28a的安装。
107.作为变型,套筒36的内径是螺纹的、锥形的或多边形的,以传递更多的扭矩。
108.第三实施例允许以比第四实施例更高的转速旋转,但是传递的扭矩比第四实施例更少。
109.图7示出了机械系统12的第六实施例的局部剖视图,其中包括压紧元件22的第五实施例。
110.可以看到转子15和传动轴16。
111.传动轴16的一端包括第一联接盘38。
112.压紧元件22包括与磁块21接触的紧固凸缘22a。
113.压紧元件22的自由端包括第二联接盘39,第一和第二联接盘38和39相互连接,使得机械扭矩穿过传动轴16和紧固凸缘22a。
114.紧固凸缘22a和第二联接盘39通过中轴40连接。
115.联接盘例如通过螺钉41相互连接,每个螺钉41穿过第一联接盘38中的平滑通孔42并接合在第二联接盘39的螺纹孔43中。
116.螺纹孔43均匀地分布在第二盘39的嵌入直径d2上,而平滑通孔42均匀地分布在第一盘38的嵌入直径d1上,第一和第二盘的嵌入直径d1和d2相等或基本相等。
117.根据另一实施例,压紧元件22没有中轴40。
118.根据又另一实施例,如果压紧元件22包括中轴40,则平滑孔42和螺纹孔43分别插入第二和第一联接盘39和38中。
119.作为变型,联接盘38和39包括平滑孔42,联接螺栓,例如螺钉和螺母或螺杆插入其中,一个螺母接合在每个螺杆的一端。
120.转子15和传动轴16可以通过移除螺钉41容易地分离,并且通过拧紧螺钉41容易地
连接。
121.图8和图9示出了压紧元件22的第六实施例的局部剖视图和侧视图,其中包括第二联接盘39的第二实施例。
122.可以看到转子15包括压紧元件22。
123.此实施例与图7所示的先前实施例的不同之处在于,压紧元件22没有中轴40,并且压紧元件22包括容纳螺母45的埋头孔44,螺母45保持压紧的磁片26,使得压紧元件22中的拉杆28的端部埋入所述压紧元件中,拉杆穿过插入在紧固凸缘22a中的平滑孔43b。
124.拉杆28的嵌入直径d小于第一和第二盘38和39的孔43和42的嵌入直径。
125.紧固凸缘22a和联接盘39一体形成,螺纹孔43在紧固凸缘22a中形成,并且均匀地分布在嵌入直径d2上。
126.作为未示出的变型,孔43均匀地分布在紧固凸缘22a的两个不同直径上,以将更多的扭矩传递到设有两排紧固螺钉41的轴16的联接盘38。
127.图10和图11示出了压紧元件22的第七实施例的局部剖视图和侧视图。
128.可以看出转子15包括压紧元件22。
129.此实施例与图8所示的先前实施例的不同之处在于,拉杆28的嵌入直径d等于或基本等于第二联接盘39的螺纹孔43的嵌入直径d2,螺纹孔43与拉杆28的嵌入孔46交替。
130.拉杆28的端部接合在螺纹孔46中,使得每个拉杆28的端部埋入压紧元件22中。
131.作为未示出的变型,螺纹孔43的嵌入直径d2大于拉杆28的直径d。
132.根据另一个未示出的变型,螺纹孔43在两个不同的嵌入直径上被嵌入。
133.根据又另一个未示出的变型,螺纹孔43的嵌入直径d2小于拉杆28的嵌入直径d。
134.压紧元件22的第六和第七实施例允许转子15和包括传动轴16的机械装置相互独立地生产,然后将它们组装在一起,从而允许机械系统以几个单独的模块运输。
135.图12和图13示出了机械系统12的第七实施例的局部剖视图,其中包括压紧元件22的第八实施例。
136.可以看到转子15包括具有第二盘39的第二实施例的压紧元件22,且传动轴16包括第一盘38的第二实施例。
137.在机械系统12的此实施例中,第一盘38与图7所示的盘38的第一实施例的不同之处在于,第一盘38包括埋头孔47,连接第一盘38和第二盘39的螺钉48的头插入在埋头孔47中,并且第一盘38包括中心盲孔50,该中心盲孔50包括与轴线b对准或基本对准的中心轴线。
138.此外,在此实施例中,第二盘39与图8所示的盘39的第二实施例的不同之处在于,它包括中心销49,该中心销49有间隙地或没有间隙地接合到盲孔50中,用于在第一盘38和第二盘39之间传递扭矩。
139.例如,销49可以是正方形、多边形、三角形。
140.接合在孔50中的销49允许比在不包括由相同材料制成的轴和紧固凸缘或不包括销49的先前实施例中传递更高的扭矩。
141.作为变型,销49是非对称多边形,从而允许盘38和39之间进行角度分度。
142.根据另一变型,销49是圆柱形,从而允许销38和39之间进行径向锁定。
143.根据又另一实施例,销49位于第一盘38中,且盲孔50位于第二盘39中。
144.图14和图15示出了机械系统12的第八实施例的局部剖视图,其包括压紧元件22的第九实施例。
145.可以看出,转子15包括具有第二盘39的第四实施例的压紧元件22,并且传动轴16包括第一盘38的第三实施例,以及销51。
146.销51可以是各种形状,例如矩形、多边形或圆柱形。
147.在此实施例中,第一盘38与图7所示的第一盘38的第一实施例的不同之处在于,第一盘38包括埋头孔47,连接第一盘38和第二盘39的螺杆48b的螺母48a插入该埋头孔47中,并且第一盘38包括均匀地分布在直径d3上的盲孔52。
148.此外,在此实施例中,第二盘39与图8所示的盘39的第二实施例的不同之处在于,第二盘39包括均匀地分布在直径d3上的盲孔53,使得销51插入到盲孔52和53中。
149.插入盲孔52和53中的销51允许比在不包括销也不包括由相同材料制成的轴和紧固凸缘的机械系统的实施例中传递更高的扭矩。
150.盘38和39包括至少两个盲孔52和53,它们被构造成每个容纳一个销51。
151.作为未示出的变型,销51在两个不同的嵌入直径上被嵌入。
152.销51可以有间隙地或无间隙地插入盲孔52和53中,胶合或紧套到一个或两个盲孔52、53中。
153.图16和图17示出了机械系统元件12的第九实施例的局部剖视图,其包括压紧元件22的第十实施例。
154.可以看出包括具有紧固凸缘22a的压紧元件22的转子15,以及传动轴16。
155.紧固凸缘22a包括平滑孔43b和螺纹中心通孔55,平滑孔43b顶部有埋头孔44,其容纳螺母45以保持磁片26压紧。
156.传动轴16包括螺纹中心销56。
157.中心销56接合在螺纹中心孔55中,使得机械扭矩穿过传动轴16和紧固凸缘22a。
158.当中心销56完全拧入螺纹中心孔55时,轴16包括靠在紧固凸缘上的肩部。
159.作为变型,传动轴16没有肩部,使得当轴16的螺纹端完全拧入螺纹中心孔55时,轴16的端部靠在磁块21上,例如靠在短路盘24上。
160.根据另一实施例,中心孔55和销56没有内螺纹和螺纹,并且例如通过紧套、键合或焊接接合。
161.根据又另一实施例,传动轴16没有中心销56,轴16的端部接合在中心孔55中。
162.作为变型,销56或轴16的端部是锥形的、多边形的或具有花键以传递更多的扭矩。
163.图5至图17中示出的实施例允许独立生产转子15、传动轴16和包含轴16的机械装置,特别便于物流和搬运。
164.当然,在上述实施例中,拉杆28可以通过埋入压紧元件中的螺母保持在压紧元件中,或者可以接合在插入压紧元件中的螺纹孔中,使得拉杆的端部不会从压紧元件中突出,特别是为了确保紧固凸缘和轴16的联接盘之间的良好接触。
165.在上述实施例中,旋转电动机以电机模式运行。
166.当然,旋转电动机可以在发电机模式下运行以产生电力。
167.在此运行模式中,机械系统12由机械动力产生装置驱动,比如例如燃气轮机或蒸汽轮机,(一个或多个)传动轴16驱动(一个或多个)转子。
168.根据另一种运行模式,转子15的第一紧固凸缘可以驱动机械动力消耗装置,例如压缩机,并且转子15的第二紧固凸缘可以由机械动力产生装置驱动,例如电动机、内燃机,特别是柴油机、燃气轮机或蒸汽轮机。
169.当然,根据图2至图17中所示的实施例之一,转子15可以包括相同或不同的紧固凸缘22a和23a。
170.上面描述的机械系统12的实施例允许特别是减小系统的质量和尺寸,同时增加系统中包含的(一个或多个)旋转电动机的转速,从而增加通过所述系统的总效率和通过所述系统的动力。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。