1.本发明涉及一种物流包装盒贴标系统,尤其涉及一种物流仓储行业的物流包装盒贴标系统。
背景技术:
2.客户通常要求在发货给客户之前要在物流包装盒上粘贴包含订单信息的标签。在现有技术中,大多数贴标过程都是人工完成的,人工贴标费时费力,效率低,成本高。
技术实现要素:
3.本发明的目的旨在解决现有技术中存在的上述问题和缺陷的至少一个方面。
4.根据本发明的一个方面,提供一种物流包装盒贴标系统,包括:读码器,适于读取物流包装盒上的原始标签的条形码,所述条形码包含客户订单号;服务器,与所述读码器通信,适于根据所述读码器读取的客户订单号查询出客户订单信息;打印机,与所述服务器通信,适于打印所述服务器查询到的客户订单信息,以获得一个新标签;和机器人,适于抓取打印出的新标签和将抓取的新标签粘贴到物流包装盒上。
5.根据本发明的一个实例性的实施例,所述物流包装盒贴标系统还包括非接触距离传感器,所述非接触距离传感器适于检测所述物流包装盒的高度。
6.根据本发明的另一个实例性的实施例,所述物流包装盒贴标系统还包括第一摄像机,所述第一摄像机适于拍摄所述物流包装盒的顶面的图像,并可根据拍摄到的物流包装盒的顶面的图像识别出所述物流包装盒的长度和宽度。
7.根据本发明的另一个实例性的实施例,所述物流包装盒贴标系统还包括高度调节装置,所述高度调节装置适于根据所述距离传感器检测到的物流包装盒的高度来调节所述第一摄像机的高度位置,使得所述第一摄像机与所述物流包装盒的顶面之间的距离等于第一预定距离,以使所述物流包装盒的顶面位于所述第一摄像机的焦平面上。
8.根据本发明的另一个实例性的实施例,所述高度调节装置包括竖直滑轨和滑动地安装在所述竖直滑轨上的滑动块,所述第一摄像机安装在所述滑动块上,从而可随所述滑动块一起沿所述竖直滑轨上下移动。
9.根据本发明的另一个实例性的实施例,所述物流包装盒贴标系统还包括第二摄像机,所述第二摄像机用于引导所述机器人将所述新标签粘贴到所述物流包装盒的侧面上。
10.根据本发明的另一个实例性的实施例,所述机器人具有适于抓取所述新标签的抓取器,所述第二摄像机被固定在所述抓取器上,使得所述第二摄像机相对于所述抓取器的位置始终保持不变。
11.根据本发明的另一个实例性的实施例,所述抓取器适于抓取不同尺寸的新标签,所述第二摄像机适于识别所述新标签的尺寸;所述机器人适于根据识别到的新标签的尺寸调节所述抓取器,以抓取不同尺寸的新标签。
12.根据本发明的另一个实例性的实施例,所述机器人在粘贴所述新标签时,所述第
二摄像机的光轴与所述物流包装盒的侧面垂直,并且所述第二摄像机与所述物流包装盒的侧面之间的距离等于第二预定距离,以使所述物流包装盒的侧面位于所述第二摄像机的焦平面上。
13.根据本发明的另一个实例性的实施例,所述第二摄像机引导所述机器人将所述新标签粘贴到所述物流包装盒的已粘贴有所述原始标签的侧面上。
14.根据本发明的另一个实例性的实施例,当所述新标签的长度大于所述物流包装盒的高度时,所述第一摄像机引导所述机器人将所述新标签的具有条形码的部分粘贴在所述物流包装盒的侧面上,将所述新标签的其余部分弯折并粘贴到所述物流包装盒的顶面上。
15.根据本发明的另一个实例性的实施例,所述物流包装盒贴标系统具有在其流水线上从上游向下游依次布置的第一工位、第二工位和第三工位;所述非接触距离传感器设置在所述第一工位,所述第一摄像机和所述读码器设置在所述第二工位,所述机器人、所述第二摄像机和所述打印机设置在所述第三工位。
16.根据本发明的另一个实例性的实施例,所述物流包装盒贴标系统还包括包装盒输送机,所述包装盒输送机适于将物流包装盒依次输送到第一工位、第二工位和第三工位。
17.根据本发明的另一个实例性的实施例,所述包装盒输送机具有循环输送带,所述物流包装盒以顶面朝上的方式被搭载在所述包装盒输送机的循环输送带上。
18.根据本发明的另一个实例性的实施例,所述服务器为远程服务器,并通过无线网络与所述读码器和所述打印机通信。
19.在本发明的前述各个实例性的实施例中,物流包装盒贴标系统能够自动地实现在物流包装盒上粘贴标签,节省了人工成本,并且极大地提高物流包装盒贴标效率。
20.通过下文中参照附图对本发明所作的描述,本发明的其它目的和优点将显而易见,并可帮助对本发明有全面的理解。
附图说明
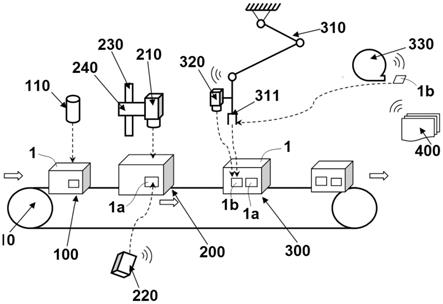
21.图1显示根据本发明的一个实例性的实施例的物流包装盒贴标系统的示意图。
具体实施方式
22.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在说明书中,相同或相似的附图标号指示相同或相似的部件。下述参照附图对本发明实施方式的说明旨在对本发明的总体发明构思进行解释,而不应当理解为对本发明的一种限制。
23.另外,在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本披露实施例的全面理解。然而明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。在其他情况下,公知的结构和装置以图示的方式体现以简化附图。
24.根据本发明的一个总体技术构思,提供一种物流包装盒贴标系统,包括:读码器,适于读取物流包装盒上的原始标签的条形码,所述条形码包含客户订单号;服务器,与所述读码器通信,适于根据所述读码器读取的客户订单号查询出客户订单信息;打印机,与所述服务器通信,适于打印所述服务器查询到的客户订单信息,以获得一个新标签;和机器人,适于抓取打印出的新标签和将抓取的新标签粘贴到物流包装盒上。
25.图1显示根据本发明的一个实例性的实施例的物流包装盒贴标系统的示意图。
26.如图1所示,在图示的实施例中,该物流包装盒贴标系统主要包括:读码器220、服务器400、打印机330和机器人310。读码器220适于读取物流包装盒1上的原始标签1a的条形码,该条形码1a包含客户订单号。服务器400与读码器220通信,适于根据读码器220读取的客户订单号查询出客户订单信息。打印机330与服务器400通信,适于打印服务器400查询到的客户订单信息,以获得一个打印的新标签1b。机器人310适于抓取打印出的新标签1b和将抓取的新标签1b粘贴到物流包装盒1上。
27.如图1所示,在图示的实施例中,物流包装盒贴标系统还包括非接触距离传感器110,非接触距离传感器110适于检测物流包装盒1的高度。
28.如图1所示,在图示的实施例中,物流包装盒贴标系统还包括第一摄像机210,第一摄像机210适于拍摄物流包装盒1的顶面的图像,并可根据拍摄到的物流包装盒1的顶面的图像识别出物流包装盒1的长度和宽度。
29.如图1所示,在图示的实施例中,物流包装盒贴标系统还包括高度调节装置230、240,高度调节装置230、240适于根据距离传感器110检测到的物流包装盒1的高度来调节第一摄像机210的高度位置,使得第一摄像机210与物流包装盒1的顶面之间的距离等于第一预定距离,以使物流包装盒1的顶面位于第一摄像机210的焦平面上。这样,可确保第一摄像机210拍摄到的物流包装盒1的顶面图像清晰。
30.如图1所示,在图示的实施例中,高度调节装置230、240包括竖直滑轨230和滑动地安装在竖直滑轨230上的滑动块240,第一摄像机210安装在滑动块240上,从而可随滑动块240一起沿竖直滑轨230上下移动。
31.如图1所示,在图示的实施例中,物流包装盒贴标系统还包括第二摄像机320,第二摄像机320用于引导机器人310将新标签1b粘贴到物流包装盒1的侧面上。
32.如图1所示,在图示的实施例中,机器人310具有适于抓取新标签1b的抓取器311,第二摄像机320被固定在抓取器311上,使得第二摄像机320相对于抓取器311的位置始终保持不变。
33.如图1所示,在图示的实施例中,抓取器311适于抓取不同尺寸的新标签1b,第二摄像机320适于识别新标签1b的尺寸。机器人310适于根据识别到的新标签1b的尺寸调节抓取器311,以抓取不同尺寸的新标签1b。
34.如图1所示,在图示的实施例中,机器人310在粘贴新标签1b时,第二摄像机320的光轴与物流包装盒1的侧面垂直,并且第二摄像机320与物流包装盒1的侧面之间的距离等于第二预定距离,以使物流包装盒1的侧面位于第二摄像机320的焦平面上。
35.如图1所示,在图示的实施例中,第二摄像机320引导机器人310将新标签1b粘贴到物流包装盒1的已粘贴有原始标签1a的侧面上。
36.如图1所示,在图示的实施例中,当新标签1b的长度大于物流包装盒1的高度时,第一摄像机320引导机器人310将新标签1b的具有条形码的部分粘贴在物流包装盒1的侧面上,将新标签1b的其余部分弯折并粘贴到物流包装盒1的顶面上。
37.如图1所示,在图示的实施例中,物流包装盒贴标系统具有在其流水线上从上游向下游依次布置的第一工位100、第二工位200和第三工位300。非接触距离传感器110设置在第一工位100,第一摄像机210和读码器220设置在第二工位200,机器人310、第二摄像机320和打印机330设置在第三工位300。
38.如图1所示,在图示的实施例中,物流包装盒贴标系统还包括包装盒输送机10,包装盒输送机10适于将物流包装盒1依次输送到第一工位100、第二工位200和第三工位300。
39.如图1所示,在图示的实施例中,包装盒输送机10具有循环输送带,物流包装盒1以顶面朝上的方式被搭载在包装盒输送机10的循环输送带上。
40.如图1所示,在图示的实施例中,服务器400为远程服务器,并通过无线网络与读码器220和打印机330通信,例如,通过wifi网络通信。
41.本领域的技术人员可以理解,上面所描述的实施例都是示例性的,并且本领域的技术人员可以对其进行改进,各种实施例中所描述的结构在不发生结构或者原理方面的冲突的情况下可以进行自由组合。
42.虽然结合附图对本发明进行了说明,但是附图中公开的实施例旨在对本发明优选实施方式进行示例性说明,而不能理解为对本发明的一种限制。
43.虽然本总体发明构思的一些实施例已被显示和说明,本领域普通技术人员将理解,在不背离本总体发明构思的原则和精神的情况下,可对这些实施例做出改变,本发明的范围以权利要求和它们的等同物限定。
44.应注意,措词“包括”不排除其它元件或步骤,措词“一”或“一个”不排除多个。另外,权利要求的任何元件标号不应理解为限制本发明的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。