1.本发明涉及一种冲压料带制造系统,尤其涉及一种冲压成型的端子料带的制造系统。
背景技术:
2.为了提高端子的制造效率,通常采用冲压机在金属料带上连续不断地冲压出端子,冲压出的端子随料带一起输送到回收卷筒,并被盘绕到回收卷筒上。但是,由于制造工艺不稳定,在连续冲压过程中,冲压后的料带上可能存在一些不合格的端子,因此,需要将包含不合格的端子的料带段从料带上裁切掉,但是裁切掉不合格的料带段之后,会导致各个回收卷筒上盘绕的料带量各不相同,影响后续的使用。因此,在裁切之后还需要将料带的两个裁切端焊接在一起。然而,在现有技术中,料带的裁切和焊接大多采用手工操作,效率低,影响了冲压机的利用率。
技术实现要素:
3.本发明的目的旨在解决现有技术中存在的上述问题和缺陷的至少一个方面。
4.根据本发明的一个方面,提供一种冲压料带制造系统,包括至少一条冲压料带生产线。每条冲压料带生产线包括:冲压机,适于通过冲压的方式在料带上成型端子;供应卷筒,其上盘绕有待冲压的料带,用于向所述冲压机供应待冲压的料带;和回收卷筒,冲压后的料带被盘绕在其上,用于回收冲压后的料带。所述冲压料带制造系统还包括自主移动机器人,在所述自主移动机器人上安装有裁切工具和焊接工具,所述自主移动机器人适于通过操作所述裁切工具和所述焊接工具将包含不合格端子的不合格料带段裁切掉和将裁切后的料带的两个裁切端焊接在一起。
5.根据本发明的一个实例性的实施例,每条所述冲压料带生产线还包括视觉检查装置,所述视觉检查装置用于在线实时检查冲压后的料带上是否存在不合格的端子,以确定要裁切掉的不合格料带段。
6.根据本发明的另一个实例性的实施例,所述自主移动机器人包括车式移动机器人和搭载在所述车式移动机器人上的臂式工业机器人。
7.根据本发明的另一个实例性的实施例,所述臂式工业机器人具有安装在其末端臂上的工具切换盘,所述裁切工具和所述焊接工具安装在所述工具切换盘上,从而可通过所述工具切换盘实现所述裁切工具和所述焊接工具之间的切换。
8.根据本发明的另一个实例性的实施例,所述焊接工具为激光焊接头。
9.根据本发明的另一个实例性的实施例,所述自主移动机器人还包括安装在所述臂式工业机器人的末端臂上的视觉装置,所述视觉装置适于引导所述自主移动机器人执行料带的裁切操作和焊接操作。
10.根据本发明的另一个实例性的实施例,每条所述冲压料带生产线还包括夹持装置,所述夹持装置适于夹持住所述料带,以保证在所述自主移动机器人裁切或焊接料带时
料带保持不动。
11.根据本发明的另一个实例性的实施例,所述夹持装置包括沿第一方向延伸的滑轨和滑动地安装在所述滑轨上的第一夹持器和第二夹持器;所述第一夹持器用于夹持在所述料带的一个裁切端附近,所述第二夹持器用于夹持在所述料带的另一个裁切端附近。
12.根据本发明的另一个实例性的实施例,在所述视觉检查装置检查到不合格料带段时,所述第一夹持器和所述第二夹持器夹持住所述料带;在所述料带被所述第一夹持器和所述第二夹持器夹持住之后,所述自主移动机器人通过操作所述裁切工具裁切掉所述不合格料带段。
13.根据本发明的另一个实例性的实施例,在所述不合格料带段被裁切掉之后,所述第一夹持器和所述第二夹持器朝相互靠近的方向移动,以使所述料带的两个裁切端对齐并接触在一起;在所述料带的两个裁切端对齐并接触在一起之后,所述自主移动机器人通过操作所述焊接工具将所述料带的两个裁切端焊接在一起。
14.根据本发明的另一个实例性的实施例,每条所述冲压料带生产线还包括位于所述视觉检查装置和所述冲压机之间的第一料带缓存装置,所述第一料带缓存装置适于缓存预定长度的料带,以便在所述料带被所述夹持装置夹持住时缓存从所述冲压机输出的料带,以保证所述冲压机在所述料带被所述夹持装置夹持住时不停机。
15.根据本发明的另一个实例性的实施例,所述第一料带缓存装置包括一对第一定辊轮和位于所述一对第一定辊轮之间的一个第一动辊轮;所述料带支撑在所述一对第一定辊轮上,所述第一动辊轮悬挂在所述料带上,可带动所述料带向下移动,从而可缓存预定长度的料带。
16.根据本发明的另一个实例性的实施例,每条所述冲压料带生产线还包括位于所述夹持装置和所述回收卷筒之间的第二料带缓存装置,所述第二料带缓存装置适于缓存预定长度的料带,以便在所述料带被所述夹持装置夹持住时继续向所述回收卷筒供应料带,以保证所述回收卷筒在所述料带被所述夹持装置夹持住时不停止。
17.根据本发明的另一个实例性的实施例,所述第二料带缓存装置包括一对第二定辊轮和位于所述一对第二定辊轮之间的一个第二动辊轮;所述料带支撑在所述一对第二定辊轮上,所述第二动辊轮悬挂在所述料带上,可带动所述料带向下移动,从而可缓存预定长度的料带。
18.根据本发明的另一个实例性的实施例,每条所述冲压料带生产线上的供应卷筒、冲压机、第一料带缓存装置、视觉检查装置、夹持装置、第二料带缓存装置和回收卷筒沿所述料带的传送方向从上游向下游依序布置。
19.根据本发明的另一个实例性的实施例,所述冲压料带制造系统包括多条所述冲压料带生产线,每个所述自主移动机器人可自动移动到所述多条冲压料带生产线中的每一条,以实现所述多条冲压料带生产线上的料带的裁切和焊接。
20.在本发明的前述各个实例性的实施例中,冲压料带制造系统能够自动地实现料带的裁切和焊接,节省了人工成本,并且极大地提高了冲压机的利用率。
21.通过下文中参照附图对本发明所作的描述,本发明的其它目的和优点将显而易见,并可帮助对本发明有全面的理解。
附图说明
22.图1显示根据本发明的一个实例性的实施例的冲压料带制造系统的示意图。
具体实施方式
23.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在说明书中,相同或相似的附图标号指示相同或相似的部件。下述参照附图对本发明实施方式的说明旨在对本发明的总体发明构思进行解释,而不应当理解为对本发明的一种限制。
24.另外,在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本披露实施例的全面理解。然而明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。在其他情况下,公知的结构和装置以图示的方式体现以简化附图。
25.根据本发明的一个总体技术构思,提供一种冲压料带制造系统,包括至少一条冲压料带生产线。每条冲压料带生产线包括:冲压机,适于通过冲压的方式在料带上成型端子;供应卷筒,其上盘绕有待冲压的料带,用于向所述冲压机供应待冲压的料带;和回收卷筒,冲压后的料带被盘绕在其上,用于回收冲压后的料带。所述冲压料带制造系统还包括自主移动机器人,在所述自主移动机器人上安装有裁切工具和焊接工具,所述自主移动机器人适于通过操作所述裁切工具和所述焊接工具将包含不合格端子的不合格料带段裁切掉和将裁切后的料带的两个裁切端焊接在一起。
26.图1显示根据本发明的一个实例性的实施例的冲压料带制造系统的示意图。
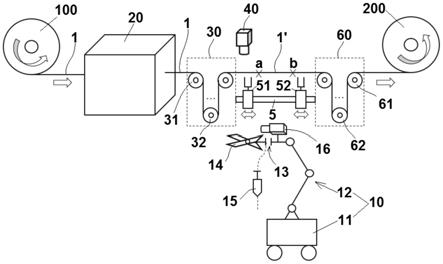
27.如图1所示,在本发明的一个实施例中,该冲压料带制造系统包括至少一条冲压料带生产线。每条冲压料带生产线主要包括:冲压机20、供应卷筒10和回收卷筒20。冲压机20适于通过冲压的方式在料带1上成型端子。在供应卷筒10上盘绕有待冲压的料带1,用于向冲压机20供应待冲压的料带1。冲压后的已成型有端子的料带1被盘绕在回收卷筒20上,用于回收冲压后的料带1。
28.如图1所示,在本发明的一个实施例中,冲压料带制造系统还包括自主移动机器人10,在自主移动机器人10上安装有裁切工具14和焊接工具15,自主移动机器人10适于通过操作裁切工具14和焊接工具15将包含不合格端子的不合格料带段1’裁切掉和将裁切后的料带1的两个裁切端a、b焊接在一起。
29.如图1所示,在本发明的一个实施例中,每条冲压料带生产线还包括视觉检查装置40,该视觉检查装置40用于在线实时检查冲压后的料带1上是否存在不合格的端子,以确定要裁切掉的不合格料带段1’。
30.如图1所示,在本发明的一个实施例中,自主移动机器人10包括车式移动机器人11和搭载在车式移动机器人11上的臂式工业机器人12。这样,安装在该自主移动机器人10上的裁切工具14和焊接工具15可以移动到预定位置。
31.如图1所示,在本发明的一个实施例中,臂式工业机器人12具有安装在其末端臂上的工具切换盘13,裁切工具14和焊接工具15安装在工具切换盘13上,从而可通过工具切换盘13快速实现裁切工具14和焊接工具15之间的切换。
32.如图1所示,在本发明的一个实施例中,焊接工具15可以为激光焊接头。但是,本发明不局限于此,例如,焊接工具15也可以是烙铁焊接头。
33.如图1所示,在本发明的一个实施例中,自主移动机器人10还包括安装在臂式工业
机器人12的末端臂上的视觉装置16,该视觉装置16适于引导自主移动机器人10执行料带1的裁切操作和焊接操作。
34.如图1所示,在本发明的一个实施例中,每条冲压料带生产线还包括夹持装置5、51、52,该夹持装置5、51、52适于夹持住料带1,以保证在自主移动机器人10裁切或焊接料带1时料带1保持不动。
35.如图1所示,在本发明的一个实施例中,夹持装置5、51、52包括沿第一方向延伸的滑轨5和滑动地安装在滑轨5上的第一夹持器51和第二夹持器52。第一夹持器51用于夹持在料带1的一个裁切端a附近,第二夹持器52用于夹持在料带1的另一个裁切端b附近。
36.如图1所示,在本发明的一个实施例中,在视觉检查装置40检查到不合格料带段1’时,第一夹持器51和第二夹持器52夹持住料带1。在料带1被第一夹持器51和第二夹持器52夹持住之后,自主移动机器人10通过操作裁切工具14裁切掉不合格料带段1’。
37.如图1所示,在本发明的一个实施例中,在不合格料带段1’被裁切掉之后,第一夹持器51和第二夹持器52朝相互靠近的方向移动,以使料带1的两个裁切端a、b对齐并接触在一起。在料带1的两个裁切端a、b对齐并接触在一起之后,自主移动机器人10通过操作焊接工具15将料带1的两个裁切端a、b焊接在一起。
38.如图1所示,在本发明的一个实施例中,每条冲压料带生产线还包括位于视觉检查装置40和冲压机20之间的第一料带缓存装置30,第一料带缓存装置30适于缓存预定长度的料带1,以便在料带1被夹持装置5、51、52夹持住时缓存从冲压机20输出的料带1,以保证冲压机20在料带1被夹持装置5、51、52夹持住时不停机。
39.如图1所示,在本发明的一个实施例中,第一料带缓存装置30包括一对第一定辊轮(类似于定滑轮)31和位于一对第一定辊轮31之间的一个第一动辊轮(类似于动滑轮)32。料带1支撑在一对第一定辊轮31上,第一动辊轮32悬挂在料带1上,可带动料带1向下移动,从而可缓存预定长度的料带1。
40.如图1所示,在本发明的一个实施例中,每条冲压料带生产线还包括位于夹持装置5、51、52和回收卷筒200之间的第二料带缓存装置60,第二料带缓存装置60适于缓存预定长度的料带1,以便在料带1被夹持装置5、51、52夹持住时继续向回收卷筒200供应料带1,以保证回收卷筒200在料带1被夹持装置5、51、52夹持住时不停止。
41.如图1所示,在本发明的一个实施例中,第二料带缓存装置60包括一对第二定辊轮(类似于定滑轮)61和位于一对第二定辊轮61之间的一个第二动辊轮(类似于动滑轮)62。料带1支撑在一对第二定辊轮61上,第二动辊轮62悬挂在料带1上,可带动料带1向下移动,从而可缓存预定长度的料带1。
42.如图1所示,在本发明的一个实施例中,每条冲压料带生产线上的供应卷筒100、冲压机20、第一料带缓存装置30、视觉检查装置40、夹持装置5、51、52、第二料带缓存装置60和回收卷筒200沿料带1的传送方向从上游向下游依序布置。
43.如图1所示,在本发明的一个实施例中,冲压料带制造系统包括多条冲压料带生产线,每个自主移动机器人10可自动移动到多条冲压料带生产线中的每一条,以实现多条冲压料带生产线上的料带1的裁切和焊接。这样,就不需要为每条冲压料带生产线提供一套单独的裁切装置和焊接装置,从而可以降低成本,而且不会影响生产效率。
44.下面将参照图1描述冲压料带的生产过程。
45.首先,供应卷筒100向冲压机20连续供应待冲压的料带1;
46.然后,冲压机20连续不断地冲压料带1,以在料带1上成型端子;
47.然后,料带1经过第一料带缓存装置30;
48.然后,视觉检查装置40检查冲压后的料带1是否存在不合格的料带段1’;
49.然后,如果检查到不合格的料带段1’,通知自主移动机器人10移动到不合格的料带段1’处,同时第一夹持器51和第二夹持器52夹持住料带1的两个裁切端a、b,但冲压机20不停机,冲压出的料带1缓存在第一料带缓存装置30中;
50.然后,自主移动机器人10在视觉装置16的引导下通过裁切装置14裁切掉不合格的料带段1’;
51.然后,第一夹持器51和第二夹持器52朝相互靠近的方向移动,以使料带1的两个裁切端a、b对齐并接触在一起;
52.然后,自主移动机器人10在视觉装置16的引导下通过焊接装置15将料带1的两个裁切端a、b焊接在一起;
53.然后,松开第一夹持器51和第二夹持器52,以释放料带1,以继续传送料带1。
54.在前述生产过程中,第二料带缓存装置60中可预先存储预定长度的料带1,这样,在料带1被夹持装置5、51、52夹持住时,第二料带缓存装置60可继续向回收卷筒200供应料带1,这样,可以保证回收卷筒200在料带1被夹持装置5、51、52夹持住时不停止,继续盘绕料带1,从而能够提高生产效率。
55.本领域的技术人员可以理解,上面所描述的实施例都是示例性的,并且本领域的技术人员可以对其进行改进,各种实施例中所描述的结构在不发生结构或者原理方面的冲突的情况下可以进行自由组合。
56.虽然结合附图对本发明进行了说明,但是附图中公开的实施例旨在对本发明优选实施方式进行示例性说明,而不能理解为对本发明的一种限制。
57.虽然本总体发明构思的一些实施例已被显示和说明,本领域普通技术人员将理解,在不背离本总体发明构思的原则和精神的情况下,可对这些实施例做出改变,本发明的范围以权利要求和它们的等同物限定。
58.应注意,措词“包括”不排除其它元件或步骤,措词“一”或“一个”不排除多个。另外,权利要求的任何元件标号不应理解为限制本发明的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。