1.本实用新型涉及电梯曳引检查领域,尤其是涉及一种电梯上行制动工况曳引检查自动测试系统。
背景技术:
2.曳引驱动电梯的工作原理是利用曳引轮槽与曳引钢丝绳之间的摩擦力,带动钢丝绳使轿厢10和对重9做上下运动。曳引驱动电梯在上行紧急制动工况下,制动器提供制动力矩使曳引轮减速停止,曳引轮槽与曳引钢丝绳之间的摩擦力使与钢丝绳联接的轿厢减速停止。
3.上行紧急制动工况下电梯如果不能被可靠制停,会有冲顶的风险,轿厢内乘客会受到严重的人身伤害。电梯不能可靠制停存在两种失效可能,一是制动力矩不足,二是曳引能力不足。当曳引能力足够而制动力矩不足时,制动力矩无法制停曳引轮,在轿厢(或对重)重力作用下电梯发生溜车,曳引轮和轿厢都无法被制停;而当制动能力足够而曳引能力不足时,曳引轮能够制停,但曳引轮与钢丝绳之间打滑严重,轿厢制停距离会非常长,甚至不能被制停。因此对电梯上行制动工况曳引检查十分重要。
4.现有检验方法主要分为钢丝绳标记法和目测法。钢丝绳标记法是在曳引钢丝绳上做好标记,轿厢空载以正常运行速度上行,当出现钢丝绳上标记时切断电源,待轿厢完全停止后用钢卷尺测量曳引钢丝绳标记处移动的位移量。此方法需检验人员配合默契,步骤较繁琐,需要大量准备时间,且人为的反应时间也导致试验数据不够精确。目测法是检验人员在机房内,轿厢以正常运行速度上行至行程上部,断开主开关,检验人员目测观察制动器制动能力与钢丝绳的滑移情况。目测法无法量化,只能凭检验人员经验判断结果,存在很大的误差。
5.现行方法都有明显的缺陷,测量数据误差较大,容易对检验结果作出误判。因此,亟需一种电梯上行制动工况曳引检查自动测试系统。
技术实现要素:
6.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种测量数据精确电梯上行制动工况曳引检查自动测试系统。
7.本实用新型的目的可以通过以下技术方案来实现:
8.一种电梯上行制动工况曳引检查自动测试系统,包括中央处理器以及分别与中央处理器连接的称重装置、数据采集装置、控制装置和警报装置,所述的称重装置安装于电梯轿厢内,所述的数据采集装置安装于井道内,用于测量曳引钢丝绳的位移量和曳引轮的转动量,所述的控制装置和中央处理器分别安装于电梯控制柜内,所述的警报装置安装于监控中心。
9.进一步地,所述的称重装置采用压力传感器,所述的压力传感器安装于电梯轿厢的底部。
10.进一步地,所述的数据采集装置包括激光测距仪和绝对值编码器,所述的激光测距仪用于测量曳引钢丝绳的位移量,所述的绝对值编码器用于测量曳引轮的转动量。
11.更进一步地,所述的激光测距仪安装于电梯机房内的曳引钢丝绳旁。
12.更进一步地,所述的绝对值编码器安装于电梯机房内曳引机的驱动主机尾端。
13.进一步地,所述的控制装置为电梯自带的控制组件,用于控制电梯的运行状态。
14.进一步地,所述的警报装置采用声光报警器。
15.优选地,所述的中央处理器可采用的型号为西门子cpu1512。
16.优选地,所述的压力传感器可采用的型号为z4c04。
17.优选地,所述的激光测距仪可采用的型号为泓川科技hl1000,所述的绝对值编码器可采用的型号为海德汉1387。
18.与现有技术相比,本实用新型具有以下优点:
19.1)测量数据精确:本实用新型设置数据采集装置,可以准确测量曳引钢丝绳的位移量和曳引轮的转动量,相比于现有通过检验人员的主观判断和人工经验更可靠;
20.2)安装难度小:本实用新型只需将各部件安装在指定位置,并进行必要的通信连接即可,对电梯本身改动小,技术难度低,不涉及到电梯的重大维修或改造;
21.3)价格便宜:本实用新型采用压力传感器、激光测距仪、中央处理器和声光报警器等,这些部件在市场上都很常见,可选择种类较多,无技术壁垒,无论是前期安装还是后期维修更换,总体价格都较低;
22.4)操作简单、可靠性高:本实用新型只需安装好,打开开关就可正常使用,无需标记钢丝绳位置,省去了很多人力、物力和时间成本,同时通过设置中央处理器,使得测量结果无需人工计算,完全智能化显示,并通过警报装置,在超过设定值自动报警,安全可靠。
附图说明
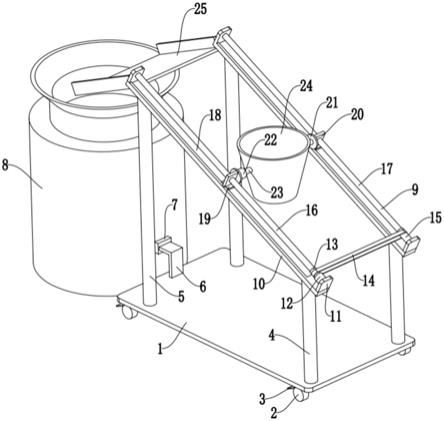
23.图1为本实用新型的结构示意图;
24.图2为本实用新型各部分连接示意图;
25.图3为本实用新型分级警示示意图。
26.其中:1、称重装置,2、数据采集装置,21、激光测距仪,22、绝对值编码器,3、控制装置,4、警报装置,5、中央处理器,6、井道,7、驱动主机,8、曳引钢丝绳,9、对重,10、轿厢,11、电梯控制柜,12、监控中心。
具体实施方式
27.下面结合附图和具体实施例对本实用新型进行详细说明。
28.实施例:
29.如图1和图2所示,本实用新型提供一种电梯上行制动工况曳引检查自动测试系统,包括中央处理器5以及分别与中央处理器5连接的称重装置1、数据采集装置2、控制装置3和警报装置4。
30.称重装置1:用于实时监测并记录进入轿厢10的载荷,采用压力传感器实现,利用压力传感器获取载荷信息,并将载荷信息传输至中央处理器5,为确保测量载荷重量的准确性,压力传感器宜安装在轿厢10底部。
31.数据采集装置2:安装于井道6内,包括激光测距仪21和绝对值编码器22,激光测距仪21安装于电梯机房内的曳引钢丝绳8旁,用于测量曳引钢丝绳8的位移量,绝对值编码器22安装于电梯机房内曳引机的驱动主机7尾端,用于测量曳引轮的转动量。
32.控制装置3:为电梯自带的控制组件,安装于电梯控制柜11内,用于控制电梯的运行状态,如停止或者就近平层、切断外招和门机电源等,安装在电梯控制柜11内。
33.中央处理器5:用于接收来自称重装置1和数据采集装置2的信号,并启动相应的应急措施,包括通过控制装置3控制电梯运行状态和/或通过警报装置4发出安全警报,可安装在电梯控制柜11内。
34.警报装置4:采用声光报警器,安装于监控中心12,起到警示提醒作用。
35.本实用新型中,压力传感器、激光测距仪21、中央处理器5、绝对值编码器22、声光报警器等部件,可选择现有的多种型号的器件,本实施例中,优选使用中央处理器5的型号为西门子cpu1512,压力传感器的型号为z4c04,激光测距仪21的型号为泓川科技hl1000,绝对值编码器22的型号为海德汉1387。
36.本实用新型的工作原理主要有以下步骤:
37.a、称量装置实时获取轿厢10内的载荷信息,并将数据传输至中央处理器5。
38.b、安装在驱动主机7尾端的绝对值编码器22可测量轿厢10的运行速度和轿厢10在井道6中的位置,并将数据传输至中央处理器5。
39.c、当监测到轿厢10内载荷为零(即轿厢10内没有乘客)且轿厢10以正常运行速度上行至行程上部时,中央处理器5向电梯控制装置3发出信号,切断电动机与制动器供电。
40.d、在切断电动机与制动器供电的同时,绝对值编码器22开始测量曳引轮的转动量,激光测距仪21开始测量钢丝绳的位移量。绝对值值编码器所测数据表征制动器的制动能力,激光测距仪21所测数据表征钢丝绳和曳引轮之间的曳引能力。
41.e、当电梯完全制停后,激光测距仪21和绝对值编码器22将所测数据传输至中央处理器5,并与电梯制造单位预设的允许值进行比较,并进行分级警示,分级警示如图3所示:当测量值远小于允许值时,电梯恢复正常运行;当测量值接近但未超过允许值时,警报装置4发出声光警报,监控室工作人员联系电梯维修人员及时调整制动器相关参数;当测量值大于允许值时,控制装置3控制电梯就近平层并停止运行。
42.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本实用新型揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。