1.本实用新型涉及数控加工维护技术领域,具体为具备废料自动清扫回收装置的数控加工中心。
背景技术:
2.数控加工中心是由机械设备与数控系统组成的适用于加工复杂零件的高效率自动化机床。数控加工中心是目前世界上产量最高、应用最广泛的数控机床之一,它的综合加工能力较强,工件一次装夹后能完成较多的加工内容,加工精度较高,就中等加工难度的批量工件,其效率是普通设备的5~10倍,特别是它能完成许多普通设备不能完成的加工,对形状较复杂,精度要求高的单件加工或中小批量多品种生产更为适用。
3.在数控加工中心加工过程中,刀具对金属进行加工会产生大量粉末状或丝状的金属废料,现有技术中,废料通常是堆积在数控加工中心的底部,废料堆积到一定程度时,需要加工人员进行人工清理,专利号为cn201820417834.6的一种数控加工中心废料自动清扫回收装置,实现加工废料的自动收集回收,避免了数控加工中心的工作效率受到影响,但是,该装置收集的废料不能汇聚于一处,且不能实现智能化工作过程,对于废料的回收效率有限,因此,现有技术存在不足,需要对其进行改进。
技术实现要素:
4.本实用新型的目的在于提供具备废料自动清扫回收装置的数控加工中心,以解决上述背景技术中提出的数控加工中心的废料处理方式不佳的问题。
5.为实现上述目的,本实用新型提供如下技术方案:具备废料自动清扫回收装置的数控加工中心,包括数控机床,所述数控机床的加工仓内设置有料斗,且料斗中心开设有收集孔,所述数控机床通过支架倾斜固定有风机,且风机的出风端朝向数控机床的加工工位,所述料斗的收集孔平行处设置有收集盒,且收集盒设置为“簸箕”型结构,所述收集盒内壁固定有气缸和凹槽,且凹槽中穿插有红外传感器,并且红外传感器和气缸通过导线电性连接,所述气缸的伸缩轴上固定有推板,且推板外壁与收集盒内壁相接触,并且推板一端面上粘连有海绵垫。
6.优选的,所述数控机床上设置有蜂鸣器,且蜂鸣器通过导线与气缸电性连接。
7.优选的,所述料斗设置为带有开口的四棱台型结构,且料斗外侧设置有凹槽,且凹槽中通过转轴穿插转动连接有滑轮,并且滑轮与数控机床的加工仓壁侧端相接触。
8.优选的,所述料斗下端固定有固定块和振动电机,且固定块下端通过弹簧与数控机床的加工仓壁底端相连接。
9.优选的,所述推板一端面通过连接柱连接有封闭板,且封闭板与收集盒内壁面相吻合,并且连接柱穿插海绵垫上设置的穿插孔。
10.与现有技术相比,本实用新型的有益效果是:该具备废料自动清扫回收装置设置有风机和料斗,风机可以对数控机床的加工工位进行吹扫,让加工工位上残留的废料和加
工过程中自然脱落的废料通过料斗的汇聚作用积累在收集盒,为废料的批量收集工作提供了良好的准备条件,提高了废料回收的效率,且该装置设置有红外传感器,红外传感器通过气缸作用于推板和海绵垫与收集盒构成清扫结构,此结构能在收集盒内废料量增加时而智能化将废料推出,避免了人力的看管,让废料收集效果更好。
附图说明
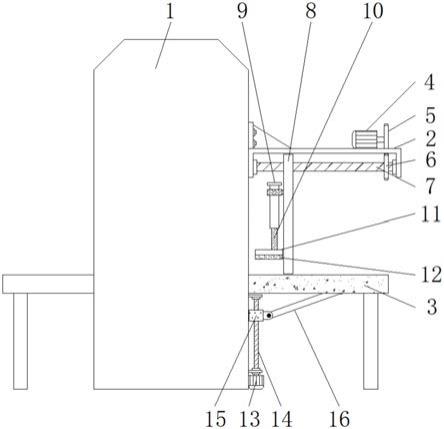
11.图1为本实用新型具备废料自动清扫回收装置的数控加工中心结构图;
12.图2为本实用新型具备废料自动清扫回收装置的数控加工中心图1中a处放大图;
13.图3为本实用新型具备废料自动清扫回收装置的数控加工中心的收集盒俯视图。
14.图中:1、数控机床,2、风机,3、蜂鸣器,4、振动电机,5、收集盒,6、弹簧,7、料斗,8、封闭板,9、红外传感器,10、气缸,11、海绵垫,12、推板,13、连接柱。
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.请参阅图1
‑
3,本实用新型提供一种技术方案:具备废料自动清扫回收装置的数控加工中心,包括数控机床1、风机2、蜂鸣器3、振动电机4、收集盒5、弹簧6、料斗7、封闭板8、红外传感器9、气缸10、海绵垫11、推板12和连接柱13,数控机床1的加工仓内设置有料斗7,且料斗7中心开设有收集孔,数控机床1上设置有蜂鸣器3,且蜂鸣器3通过导线与气缸10电性连接,蜂鸣器3能随着收集盒5内废料量的增加而及时发出警示音,避免废料的收集工作与外置容器的摆放工作不匹配,数控机床1通过支架倾斜固定有风机2,且风机2的出风端朝向数控机床1的加工工位,料斗7的收集孔平行处设置有收集盒5,且收集盒5设置为“簸箕”型结构,料斗7设置为带有开口的四棱台型结构,且料斗7外侧设置有凹槽,且凹槽中通过转轴穿插转动连接有滑轮,并且滑轮与数控机床1的加工仓壁侧端相接触,滑轮随着料斗7的活动而摩擦转动,为料斗7的活动轨迹起到限位作用,保证废料落入收集盒5的位置精准,料斗7下端固定有固定块和振动电机4,振动电机4的型号设置为xjd,且固定块下端通过弹簧6与数控机床1的加工仓壁底端相连接,振动电机4和弹簧6可以让料斗7受力而上下抖动,减少废料在料斗7上的残留,提高废料的收集效率,收集盒5内壁固定有气缸10和凹槽,且凹槽中穿插有红外传感器9,红外传感器9的型号设置为kds209,并且红外传感器9和气缸10通过导线电性连接,气缸10的伸缩轴上固定有推板12,且推板12外壁与收集盒5内壁相接触,并且推板12一端面上粘连有海绵垫11,推板12一端面通过连接柱13连接有封闭板8,且封闭板8与收集盒5内壁面相吻合,并且连接柱13穿插海绵垫11上设置的穿插孔,封闭板8可以让收集盒5封闭成一个带有开口的盒型储藏空间,避免废料在过渡储藏的过程中泄漏。
17.工作原理:在使用该具备废料自动清扫回收装置的数控加工中心时,首先,数控机床1加工过程中产生的部分废料落入料斗7,打开风机2电源,风机2工作让另外置于数控机床1的加工工位的废料也落入料斗7,然后,打开振动电机4电源,振动电机4让料斗7上下振动,其振动过程带动弹簧6弹性活动,同时,料斗7活动也带动滑轮摩擦转动,料斗7上的废料
在此过程中落入收集盒5被封闭板8阻挡,再然后,待废料在收集盒5内堆积到一定高度时,红外传感器9被触发而促使蜂鸣器3和气缸10工作,在气缸10的驱动作用力下,封闭板8、海绵垫11、推板12和连接柱13活动,活动的海绵垫11将废屑从收集盒5推出,这就是该具备废料自动清扫回收装置的数控加工中心的使用过程。
18.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.具备废料自动清扫回收装置的数控加工中心,包括数控机床(1),所述数控机床(1)的加工仓内设置有料斗(7),且料斗(7)中心开设有收集孔,其特征在于:所述数控机床(1)通过支架倾斜固定有风机(2),且风机(2)的出风端朝向数控机床(1)的加工工位,所述料斗(7)的收集孔平行处设置有收集盒(5),且收集盒(5)设置为“簸箕”型结构,所述收集盒(5)内壁固定有气缸(10)和凹槽,且凹槽中穿插有红外传感器(9),并且红外传感器(9)和气缸(10)通过导线电性连接,所述气缸(10)的伸缩轴上固定有推板(12),且推板(12)外壁与收集盒(5)内壁相接触,并且推板(12)一端面上粘连有海绵垫(11)。2.根据权利要求1所述的具备废料自动清扫回收装置的数控加工中心,其特征在于:所述数控机床(1)上设置有蜂鸣器(3),且蜂鸣器(3)通过导线与气缸(10)电性连接。3.根据权利要求1所述的具备废料自动清扫回收装置的数控加工中心,其特征在于:所述料斗(7)设置为带有开口的四棱台型结构,且料斗(7)外侧设置有凹槽,且凹槽中通过转轴穿插转动连接有滑轮,并且滑轮与数控机床(1)的加工仓壁侧端相接触。4.根据权利要求1所述的具备废料自动清扫回收装置的数控加工中心,其特征在于:所述料斗(7)下端固定有固定块和振动电机(4),且固定块下端通过弹簧(6)与数控机床(1)的加工仓壁底端相连接。5.根据权利要求1所述的具备废料自动清扫回收装置的数控加工中心,其特征在于:所述推板(12)一端面通过连接柱(13)连接有封闭板(8),且封闭板(8)与收集盒(5)内壁面相吻合,并且连接柱(13)穿插海绵垫(11)上设置的穿插孔。
技术总结
本实用新型公开了具备废料自动清扫回收装置的数控加工中心,包括数控机床,所述数控机床的加工仓内设置有料斗,且料斗中心开设有收集孔,所述数控机床通过支架倾斜固定有风机。该具备废料自动清扫回收装置设置有风机和料斗,风机可以对数控机床的加工工位进行吹扫,让加工工位上残留的废料和加工过程中自然脱落的废料通过料斗的汇聚作用积累在收集盒,为废料的批量收集工作提供了良好的准备条件,提高了废料回收的效率,且该装置设置有红外传感器,红外传感器通过气缸作用于推板和海绵垫与收集盒构成清扫结构,此结构能在收集盒内废料量增加时而智能化将废料推出,避免了人力的看管,让废料收集效果更好。让废料收集效果更好。让废料收集效果更好。
技术研发人员:李木森
受保护的技术使用者:佳恒自动化设备科技河北有限公司
技术研发日:2021.02.07
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。