1.本实用新型涉及机动车技术领域,具体涉及一种履带组件、行走轮转动切换结构及爬楼车体,可适用于智能爬楼轮椅。
背景技术:
2.爬楼轮椅是年老体弱者以及下肢伤残者必不可少的代步工具,随着无障碍设施的增多,轮椅使用者的活动范围逐步加大,但楼梯却使轮椅受到很大限制。爬楼梯轮椅按照其传动方式可分为:星轮式、履带式和步进支撑式三种。
3.星轮式爬楼轮椅的爬楼机构由均匀分布在“y”型、“五星”或“十”字形系杆上的若干个小轮构成。各个小轮既可以绕各自的轴线自转,又可以随着系杆一起绕中心轴公转。在平地行走时,各小轮自转,而爬楼梯时,各小轮一起公转,从而实现爬楼梯的功能。
4.履带型机构的爬楼梯轮椅采用比星型轮机构更为连续的行走方式,当履带每离开上一台阶或行进到下一台阶时会出现因重心偏离而前后倾侧。履带式爬楼轮椅不适合在楼梯阶沿太光滑及斜度大于30-35度的环境使用。履带式爬楼轮椅平地行走时阻力较大,转角处拐弯不灵活。对此,国内外提出过各种各样的改进机构,仍不是很理想。
5.步进支撑式爬楼轮椅其原理是模仿人体爬楼动作,由两套支承装置交替支承,以实现上下楼梯的功能。但因其传动机构复杂,其耐用性差,应用较少。
技术实现要素:
6.对于现有技术中所存在的问题,本实用新型提供了一种履带组件、行走轮转动切换结构及爬楼车体。
7.为了实现上述目的,本实用新型采用的技术方案如下:
8.履带组件、行走轮转动切换结构,包括履带组件、行走轮、转向组件和驱动组件,所述行走轮连接在转向组件上,所述转向组件包括转向轴,所述转向组件还与驱动组件相连,驱动组件带动所述行走轮绕转向轴发生转动,当行走轮处于第一状态时,所述行走轮向下突出所述履带组件,从而可以直接接触地面,当行走轮处于第二状态时,所述行走轮回缩至履带组件的上面,从而可以离开地面。
9.可选的,所述履带组件包括履带支承架、至少两个履带轮和环形包绕履带轮的履带,至少一个履带轮为驱动轮。
10.可选的,所述履带组件的两端均设有履带轮,其中一个为非驱动轮,所述转向轴穿过非驱动轮的轴心。
11.可选的,所述转向组件包括连接在转向轴上的支臂和转向臂,所述行走轮安装在所述转向臂的端部,所述驱动组件连接在支臂的端部,驱动组件通过支臂带动转向轴转动,转向轴通过转向臂带动行走轮转动。
12.可选的,所述驱动组件安装在所述履带支承架上。
13.可选的,所述驱动组件为电动推杆。
14.可选的,所述行走轮为万向轮或轮毂电机车轮。
15.可选的,所述履带组件为两个,所述转动轴穿过两个非驱动轮的轴心。
16.爬楼车体,包括上述的履带组件、行走轮转动切换结构,还包括驱动所述履带组件转动的动力机构。
17.本实用新型的履带组件、行走轮转动切换结构利用可移动的行走轮实现行走轮和履带的交替切换,即在地面上用前后行走轮行走,在台阶上用履带行走。
附图说明
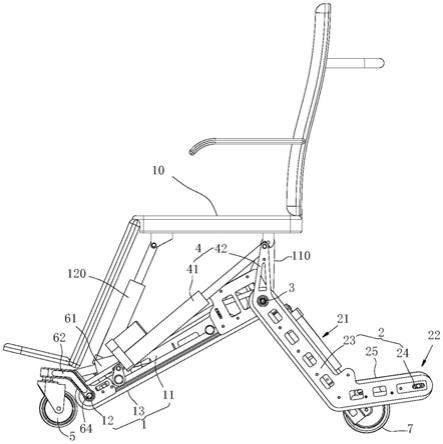
18.图1是本发明的智能爬楼轮椅的主视图;
19.图2是图1的右视图;
20.图3是图1的左视图;
21.图4是图1的仰视图;
22.图5是图1的俯视图;
23.图6是图1的立体图一;
24.图7是图1的立体图二;
25.图8是图1的立体图三;
26.图9是本发明的智能爬楼轮椅初始状态图;
27.图10是本发明的智能爬楼轮椅初始爬楼状态图;
28.图11是本发明的智能爬楼轮椅爬楼中状态图;
29.图12是本发明的智能爬楼轮椅爬到顶状态图;
30.图13是本发明的智能爬楼轮椅爬楼完成状态图。
31.图中:
32.前履带组件1;前履带侧挡11;前履带轮12;前履带13;
33.后履带组件2;前履带段21;后履带段22;后履带侧挡23;后履带轮24;后履带25;张紧轮26;
34.第一转动轴3;
35.第一驱动机构4;第一电动推杆41;第一连接组件42;
36.前行走轮5;
37.第二驱动机构6;第二电动推杆61;转向臂62;支臂63;转向轴64;
38.后行走轮7;
39.第三驱动机构8;第三电动推杆81;滑轨82;滑槽83;轮轴84;滑槽横梁85;滑轨横梁86;
40.电机9;
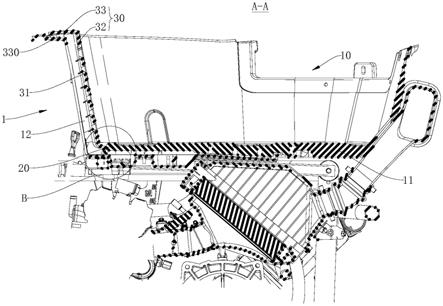
41.座椅10;
42.第一支件110;
43.第四电动推杆120。
具体实施方式
44.申请人在研究智能爬楼轮椅中得到本实用新型的履带组件、行走轮转动切换结
构,因此本实用新型具体实施方式将以智能爬楼轮椅的发明构思为基础逐渐展开说明,本技术的履带组件、行走轮转动切换结构将在多个实施例的一些部分得到充分体现,其余部分可看作是本实用新型具体应用的示例。
45.实施例1双履带支撑结构
46.结合图1
‑
13说明本实施例的双履带支撑结构,其包括前履带组件1、后履带组件2、第一转动轴3和第一驱动机构4。
47.其中:后履带组件2包括前履带段21和后履带段22,后履带段22与前履带段21呈l形设置,后履带段22向上倾斜,用于爬坡或爬上台阶。所述第一转动轴3被设置在前履带组件1的后端或靠近该后端,且同时该第一转动轴3被设置在后履带组件2的前端或靠近该前段,以便使前履带组件1和后履带组件2折叠后呈“∧”形,一方面可以缩短双履带支撑结构的前后距离,有利于减少体积,方便转向,另一方面前履带组件1和后履带组件2的履带支承架作为支撑主体时形成三角形的牢固支撑结构。第一驱动机构4驱动前履带组件1和/或后履带组件2绕第一转动轴3转动,当转动处于第一状态时,前履带组件1的前端和后履带组件2的后端向下倾斜且后履带组件2与前履带组件1具有夹角,当转动处于第二状态时,前履带组件1与后履带组件2的行走平面处于同一平面上。
48.具体的,前履带组件1包括前履带支承架,前履带支承架包括两个前履带侧挡11及连接在两个前履带侧挡11之间的连接杆,前履带支承架的前后两端均设有前履带轮12,后面一个前履带轮12为驱动轮。两个前履带侧挡11的下方设有前尼龙轨道,两个前履带轮12外侧环形包绕有前履带13。
49.具体的,后履带段22与前履带段21固在一起,指l形的后履带段22与前履带段21之间的夹角不变,当处于第一状态时,后履带段22向后或向后向上延伸。前履带段21和后履带段22为以下形之一:(1)采用同一履带包绕成一体的履带结构,形成后履带组件2,(2)采用两个履带包绕成独立的两个履带结构,共同形成后履带组件2。当采用形式(1)时,后履带组件2包括后履带支承架,后履带支承架包括两个后履带侧挡23及连接在两个后履带侧挡23之间的连接杆。两个后履带侧挡23弯折成l形,两端均设有后履带轮24,l形拐角外侧设有一个后履带轮24,l形拐角内侧设有张紧轮26,其中前端的后履带轮24为驱动轮。三个前履带轮12外侧环形包绕的后履带25,张紧轮26压在后履带25的外侧。三个后履带轮24将后履带组件2分成前履带段21和后履带段22。
50.具体的,前履带组件1的后端具有驱动轮,后履带组件2的前端具有驱动轮,前履带轮12的驱动轮的中心轴与后履带组件2的驱动轴的中心轴为同一轴,该轴为驱动轴,通过电机9带动驱动轴旋转,从而同时驱动前履带13和后履带25运转。所述驱动轴形成所述第一转动轴3。
51.作为具体示例,第一驱动机构4包括:连接后履带组件2的第一连接组件42;第一推拉机构,第一推拉机构的一端连接一固定点,固定点指在推杆作用下不可伸缩的一端,图示为铰连接。第一推拉机构的另一端与第一连接组件42相连,第一推拉机构通过第一连接组件42带动后履带组件2实现第一状态、第二状态的转换。具体结构示例,第一推拉机构为第一电动推杆41,第一电动推杆41的一端连接在前履带支承架上,另一端连接第一连接组件42。第一连接组件42由后履带支承架的前端驱动轮处向上延伸形成。当第一电动推杆41的伸缩杆前后伸缩时,带动后履带组件2绕驱动轴旋转,实现第一状态和第二状态的转换。
52.实施例2双履带行走爬楼底盘结构
53.结合图1
‑
13说明本实施例的双履带行走爬楼底盘结构,其包括实施例1的双履带支撑结构,还包括前行走轮5和第二驱动机构6、后行走轮7和第三驱动机构8及动力机构。
54.前行走轮5位于前履带组件1的前端或靠近该前端,后行走轮7安装在后履带组件2的后端或靠近该后端,使得前行走轮5和后行走轮7具有较大距离。
55.第二驱动机构6和第三驱动机构8分别驱动前行走轮5和后行走轮7发生移动,当前行走轮5或后行走轮7移动至第一状态时,前行走轮5或后行走轮7向下突出前履带组件1或后履带组件2,从而可直接接触地面。当前行走轮5或后行走轮7移动至第二状态时,前行走轮5或后行走轮7向上回缩至前履带组件1或后履带组件2的上面,从而可以离开地面。该结构用于实现行走轮和履带的交替切换,即在地面上用前后行走轮7行走,在台阶上用履带行走。
56.动力机构给前履带组件1和后履带组件2提供动力,可选地,动力机构为电机9。
57.为配合行走轮和履带的交替切换行走,当前履带组件1和后履带组件2处于第一状态时,前行走轮5或后行走轮7也处于第一状态,当前履带组件1和后履带组件2处于第二状态时,前行走轮5或后行走轮7也处于第二状态。可以理解的是,该方式可采用控制器实现,使它们具有协调配合的动作过程。
58.相对于现有技术的传动方式,本发明的双履带行走爬楼底盘结构在前履带组件1和后履带组件2的第一状态和第二状态的切换以及前行走轮5和后行走轮7的第一状态和第二状态的切换可以既是连续的、平顺的,又是不间断的,可以实现连续、平顺、不间断的上、下台阶的动作。作为爬楼轮椅,其上下楼过程中座椅10的高度变化也是连续的、平顺的和不间断的。
59.作为具体示例,前行走轮5和后行走轮7发生移动的方式为以下方式之一:(1)绕一第二转动轴转动,(2)沿一轨道滑动。
60.具体而言,方式(1)包括:第二推拉机构,第二推拉机构的一端连接一固定点,另一端与第二连接组件相连。第二连接组件包括第二转动轴,第二推拉机构带动第二转动轴转动,从而带动前行走轮5或后行走轮7实现第一状态、第二状态的转换。
61.其中,所述前履带组件1的前端具有前履带轮12,后履带组件2的后端具有后履带轮24,所述第二转动轴穿过该前履带轮12或该后履带轮24的轴心,该前履带轮12或该后履带轮24的轴心为非驱动轮。这样可使前行走轮5安装在前履带组件1的前端,后行走轮7安装在后履带组件2的后端,以使得前行走轮5和后行走轮7具有较大距离。
62.上述描述中第二推拉机构即驱动组件,第二连接组件即转向组件,第二转动轴即转向轴64。
63.下面以前行走轮5为方式(1)进行举例。
64.转向组件包括连接在转向轴64上的支臂63和转向臂62,所述前行走轮5安装在所述转向臂62的端部,所述驱动组件连接在支臂63的端部,驱动组件通过支臂63带动转向轴64转动,转向轴64通过转向臂62带动所述前行走轮5转动。所述驱动组件安装在前履带支承架上,所述驱动组件为第二电动推杆61。所述前行走轮5为万向轮。作为车体,所述前履带组件1为两个,所述转向轴64穿过两个非驱动轮的轴心,前行走轮5也为两个。
65.方式(2)包括:
66.第三推拉机构,第三推拉机构的一端连接一固定点,另一端与第三连接组件相连;
67.滑轨82,前行走轮5或后行走轮7与滑轨82相连;
68.第三推拉机构带动滑轨82滑动,从而带动前行走轮5或后行走轮7实现第一状态、第二状态的转换。
69.上述描述中,伸缩组件包括相互配合的滑轨82和滑槽83,第三推拉机构为驱动件相连,驱动组件带动所述行走轮沿滑槽83移动。
70.下面以后行走轮7为方式(2)进行举例。
71.为使结构简化,且利用后履带支承架作为车体支承架,滑槽83和滑轨82安装在前履带支承架上。驱动组件安装在所述履带支承架上。所述驱动组件为第三电动推杆81。所述后行走轮7为轮毂电机9车轮,可使在地面行走时,给后走轮提供动力。
72.所述后履带组件2为两个,两个滑槽83分别安装在两个后履带支承架的内侧,所述滑槽83之间设有滑槽横梁85,两个后行走轮7通过轮轴84连接在一起,轮轴84的两端分别连接在两端的滑轨82上,所述驱动组件连接在滑槽横梁85和轨轴84之间。有利地,两个所述滑轨82之间还连接有滑轨横梁86。
73.实施例3双履带行走爬楼车
74.结合图1
‑
13说明本实施例的双履带行走爬楼车,其包括实施例2的双履带行走爬楼底盘结构和承托机构,承托机构连接在前履带组件1上。承托机构可以是座椅10、床面、托台或车厢等。
75.有利地,承托机构的一端通过第一支件110直接或间接连接在前履带组件1的后端,另一端通过第二支件直接或间接连接在前履带组件1的前端。该结构使得双履带行走爬楼车以前履带组件1和后履带组件2作为承托机构的主体支撑部分,区别于传统的爬楼轮椅在轮椅基础上附加履带,本结构更加简洁紧凑,减少冗余。
76.具体的,前履带支承架的后端向上延伸形成第一支件110,承托机构连接在第一支件110的上端部。前履带支承架的前端连接有第二支件,第二支件为第四电动推杆120。通过第四电动推杆120可根据需要调节承托机构的水平度和重心。
77.实施例4智能爬楼轮椅
78.如图1
‑
13所示,智能爬楼轮椅包括实施例3的双履带行走爬楼车,其中承托机构为座椅10,还包括控制器,控制器与动力机构、第一电动推杆41、第二电动推杆61和第三电动推杆81相连。
79.第二支件为第四电动推杆120,还包括用于检测座椅10倾斜角度的角度传感器,角度传感器与控制器和第四电动推杆120相连,控制器根据角度传感器的信号指令第四电动推杆120带动座椅10转动至需要的倾斜角度,包括可以实时检测椅面的水平度,控制第四电动推杆120随时调节椅面的水平度,使椅面始终保持水平状态,增加人的水平感和安全感。
80.本发明的智能爬楼轮椅,由于座椅10是安装在前履带组件1上的,而前履带13件组件和后履带组件2又是可以折叠或放平的,因此,当前履带组件1和后履带组件2处于第一状态时,使座椅10处于一个较高的、正常的座椅10位置,使坐姿更加舒服;当前履带组件1和后履带组件2处于第二状态时,由于前履带组件1和后履带组件2向下移动至平行状态,自然也就使得座椅10位置下降,有利于降低重心,避免重心偏离而前后倾侧。
81.具体的,座椅10包括以下部件:椅面、椅背、扶手、腿部承托、脚部承托、推拉把手,
椅面、椅背、扶手、腿部承托、脚部承托、推拉把手之间通过折叠机构折叠至椅面所处平面上。折叠机构采用常规的可折叠限位的结构即可,具体是把腿部承托向上抬起至与椅面同一平面上,把脚部承托向上折叠至腿部承托的上方,把椅背向下折叠至椅面的上方,把扶手向上或向下折叠至与椅背同一平面上。
82.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。