技术特征:
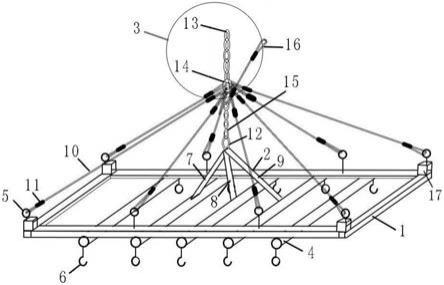
1.一种玻纤双纱团一次性自动移载机器人,包括y向移动导轨(1),所述y向移动导轨(1)上设置有y向滑座(2),所述y向滑座(2)的一侧设置有用于驱动y向滑座(2)沿y轴方向移动的y向驱动装置,所述y向滑座(2)上连接有可绕z轴自由转动的z向立柱(3),其特征在于,所述z向立柱(3)上设置有用于取放纱团(4)并可沿z轴方向移动的伸缩取纱机构(5);所述伸缩取纱机构(5)包括纱团暂存机构(6)、滑轨底座(7)和托盘升降机构(8),所述托盘升降机构(8)可滑动的设置在所述滑轨底座(7)上,所述托盘升降机构(8)包括多个沿z轴方向升降的托盘(9),多个所述托盘(9)沿所述托盘升降机构(8)的移动方向间隔设置,所述纱团暂存机构(6)包括一用于暂时存放纱团的横梁(10),所述横梁(10)位于所述托盘(9)的上方且沿所述托盘升降机构(8)的移动方向延伸。2.根据权利要求1所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述托盘升降机构(8)还包括壳体(11)、升降驱动机构和称重传感器(12),多个所述托盘(9)均连接有升降驱动机构,所述升降驱动机构包括丝杆(13)、安装座(14)和称重底座(15),所述丝杆(13)竖直设置在所述壳体(11)内并与所述壳体(11)转动连接,所述安装座(14)与所述丝杆(13)螺纹连接,所述称重底座(15)与所述安装座(14)固定连接,所述称重底座(15)与所述壳体(11)的侧壁滑动连接,所述称重底座(15)上设置有所述称重传感器(12),所述称重传感器(12)通过立柱(16)与所述托盘(9)固定连接,所述托盘(9)位于所述壳体(11)的上方。3.根据权利要求2所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述升降驱动机构还包括电机(17)、带轮(18)和同步轮(19),所述电机(17)设置在所述壳体(11)内,所述电机(17)的输出轴固定有所述带轮(18),所述丝杆(13)上固定有所述同步轮(19),所述带轮(18)通过皮带与所述同步轮(19)传动连接。4.根据权利要求2所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述壳体(11)的内侧壁上竖直固定有导轨(20),所述称重底座(15)可滑动的设置在所述导轨(20)上。5.根据权利要求2所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述壳体(11)内设置有伺服电机(21),所述伺服电机(21)的输出轴连接有减速器(22),所述减速器(22)的输出轴穿出至所述壳体(11)外并固定有大齿轮(23),所述滑轨底座(7)上设置有与所述大齿轮(23)相啮合的齿条(24)。6.根据权利要求5所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述滑轨底座(7)的两内侧壁均设置有滑轨(25),所述壳体(11)的两外侧壁上均固定有与所述滑轨(25)适配的滑块(26)。7.根据权利要求1所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述滑轨底座(7)的一侧设置有z轴驱动机构,所述z轴驱动机构用于驱动伸缩取纱机构(5)沿着z轴方向移动。8.根据权利要求7所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述z轴驱动机构包括驱动电机(27)、减速机(28)和齿轮(29),所述驱动电机(27)安装在所述滑轨底座(7)的一侧,所述驱动电机(27)的输出轴与所述减速机(28)连接,所述减速机(28)的输出轴固定连接有所述齿轮(29),所述z向立柱(3)内沿z轴方向固定有升降齿条(30),所述齿轮(29)与所述升降齿条(30)啮合。
9.根据权利要求8所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述z向立柱(3)内沿z轴方向固定有升降导轨(31),所述滑轨底座(7)的一端可滑动的设置在所述升降导轨(31)上。10.根据权利要求1所述的一种玻纤双纱团一次性自动移载机器人,其特征在于,所述纱团暂存机构(6)还包括与滑轨底座(7)固定连接的支架(32),所述横梁(10)固定安装在所述支架(32)的顶部。
技术总结
本实用新型公开了一种玻纤双纱团一次性自动移载机器人,包括y向移动导轨,y向移动导轨上设置有y向滑座,y向滑座的一侧设置有用于驱动y向滑座沿y轴方向移动的y向驱动装置,y向滑座上连接有可绕z轴自由转动的z向立柱,z向立柱上设置有用于取放纱团并可沿z轴方向移动的伸缩取纱机构,伸缩取纱机构包括纱团暂存机构、滑轨底座和托盘升降机构,托盘升降机构可滑动的设置在滑轨底座上,托盘升降机构包括多个沿z轴方向升降的托盘,多个托盘沿托盘升降机构的移动方向间隔设置,纱团暂存机构包括一用于暂时存放纱团的横梁,横梁位于托盘的上方。可一次性取多个纱团,大大提高了纱团的取放效率,降低了工人的工作强度。降低了工人的工作强度。降低了工人的工作强度。
技术研发人员:李川 陈刚
受保护的技术使用者:福德机器人(成都)有限责任公司
技术研发日:2020.12.31
技术公布日:2021/11/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。