1.本实用新型涉及一种工程起重设备技术领域,具体为一种双限位限重桥梁悬臂施工用复合式智能吊机。
背景技术:
2.悬臂施工法是指在桥梁施工中,将梁部结构分为若干节段,平衡地逐段向跨中悬臂浇筑或拼装梁段,直至桥跨结构合龙的施工方法。悬臂施工法具有许多突出的优点,可以不用或少用支架,施工时不影响通航或桥下交通,并适用于变截面桥梁结构的施工,对于墩顶承受负弯矩的桥梁,施工时的受力状态与建成后的受力状态基本一致,因而可减少或节省施工用材。其工作是可用挂篮和塔吊吊机进行配合施工,挂篮设置在悬臂端部,塔吊架设在地面,附着在挂篮侧面的桥梁悬臂上,用于将货物吊运至桥面。
3.挂篮施工也叫施工挂篮,是预应力混凝土连续梁、t形钢构和悬臂梁分段施工的一项主要设备,它是能够沿轨道整体向前滑动或滚动的承重构架。为下一节段施工作业提供空中平台。完成一个节段施工后,挂篮即可前移并固定,进行下一节段的施工,如此循环直至悬臂灌注完成。其具有自重轻、结构简单、受力明确、坚固稳定、变形小、前移和装拆方便、具有较强的可重复利用性。挂篮主要由承重结构、吊挂系统、走行系统与模板系统等组成,分为桁架式挂篮、三角式挂篮、棱形挂篮和斜拉式挂篮等形式。在桥梁施工中应用非常广泛。克服了受地形、江河等不利自然条件施工桥梁的限制。适合于大跨径,跨越深水、山谷、立体交通等处。
4.在现有的悬臂施工,常遇到大跨度桥梁的情况,由于江河宽度的限制,塔吊只能架设在陆地上,塔吊作业半径无法企及到悬臂端部,造成施工不便,物料运输困难。
技术实现要素:
5.一种双限位限重桥梁悬臂施工用复合式智能吊机,可安装在挂篮等临时结构,或者直接安装在桥梁永久结构上,实现在桥梁悬臂施工的任意位置都可进行物料吊装,适用不同路径和高度的桥梁悬臂施工,能满足陆上、水上起吊任务。
6.其技术方案通过以下实现:
7.双限位限重桥梁悬臂施工用复合式智能吊机,桥梁悬臂端箱梁的钢腹板延伸悬臂处支撑中横梁与前横梁,由中横梁、前横梁、下后横梁、扁担梁、吊杆、底栏纵梁、内滑梁和外滑梁组成挂篮系统,挂篮系统通过固定在中横梁与前横梁底部的行走部件在钢腹板延伸悬臂的上沿进行移动;在中横梁与前横梁上架设吊机,脚架支点分别跨在中横梁与前横梁上,吊机可随挂篮系统移动。该吊机作业时通常有两种工况,一是吊装小件,二是吊装大件。对于小件吊装仅即作业半径,不限回转角度全回转,对于同一方向累计转向超过1080度时(即3圈),只能反向转动;对于大件吊装,即半径和回转角度,只能在特定的角度内转动;两种工况均要进行限重。
8.所述吊机转轴上固定回转电机,回转电机通过减速箱驱动回转齿轮转动,进而驱
动回转塔架转动。
9.所述回转塔架一端设置配重。配重块为铁块,可在回转塔架上设置轨道,配重块可沿轨道前后移动,进而实现不同起吊重量的配重调整,以满足不同重量的配重力矩要求。
10.所述钢腹板为波纹钢腹板,钢腹板上沿做为行走部件行走的槽型钢轨道,轨道两侧壁均布定位销孔。
11.所述中横梁与前横梁之间设置牵引拉杆。当完成一个节段的混凝土施工,需要前进到下一段节段施工位置,挂篮系统的行走可由如下方式实现:将千斤顶底端用销钉固定在钢腹板上,千斤顶活塞端支顶前横梁前进,前横梁通过牵引拉杆牵引中横梁一起向前,最终实现整个挂篮系统稳步前进。
12.所述吊机的控制台设置在吊机以外区域,控制台设置plc控制。程序主要是获取数据、处理数据、下达指令,识别人工介入并优先执行人工指令。
13.所述回转塔架上设置测重装置、力矩感应装置和角度感应装置,以上装置连接plc,并通过plc程序控制,实现最大载重限制、作业半径限位、回转角度限位。
14.所述测重装置、力矩感应装置和角度感应装置数据相互关联,使最终整机在桥梁之上的左右扭矩保持在允许范围内。所述控制台上设置手动、半自动两个档位,手动系统与半自动系统相互联动,手动操作时回转角度和回转半径超出plc计算允许的范围时,手动指令将失效。所述吊机可与挂篮组合使用,也可独立于挂篮单独使用。
15.本实用新型具有突出的实质性特点和显著的进步为:
16.1、本实用新型可安装在挂篮等临时结构,或者直接安装在桥梁永久结构上,实现在桥梁悬臂施工的任意位置都可进行物料吊装,适用不同路径和高度的桥梁悬臂施工,能满足陆上、水上起吊任务。解决了大跨径桥梁塔吊作业半径无法到达桥梁跨中的桥梁施工的难题。
17.2、本实用新型除了可安装在不同形式的挂篮等临时结构上,也可直接安装在桥梁永久结构上,适用范围广泛。
18.3、本实用新型安装使用成本低廉,设备轻量化,便于安装、维护和拆卸运输。
19.4、本实用新型的测重装置、力矩感应装置和角度感应装置数据相互关联,由plc进行计算后,得到优化数据,用于限制整机在桥梁之上的左右扭矩保持在允许范围内,安全可靠。
附图说明
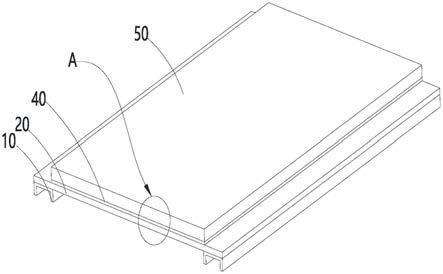
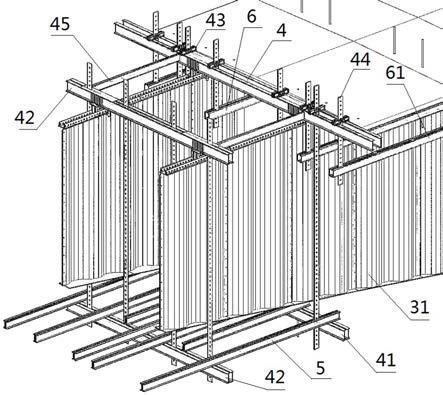
20.图1为挂篮系统结构示意图(未安装吊机);
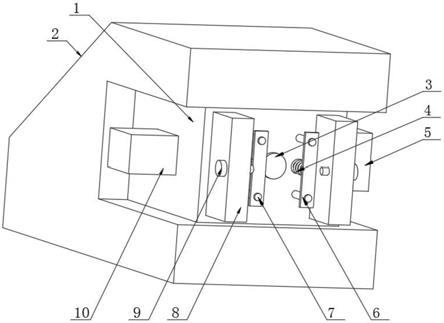
21.图2为本发明外观结构示意图;
22.图3为吊机外观结构示意图;
23.图4为吊机驱动部分结构示意图;
24.图5为挂篮系统行走活动部位结构示意图;
25.图中的序号和部件名称为:1、桥墩;2、承台;3、箱梁;31、钢腹板;32、行走部件;4、中横梁;41、下后横梁; 42、前横梁;43、扁担梁;44;吊杆;45、牵引拉杆;5、底栏纵梁;6、内滑梁;61、外滑梁;7、吊机;71、脚架;72、回转电机;73、配重;74、回转齿轮;75、回转塔架。
具体实施方式
26.实施例1
27.双限位限重桥梁悬臂施工用复合式智能吊机,桥梁悬臂端箱梁3的钢腹板31延伸悬臂处支撑中横梁4与前横梁42,由中横梁4、前横梁42、下后横梁41、扁担梁43、吊杆44、底栏纵梁5、内滑梁6和外滑梁61组成挂篮系统,挂篮系统通过固定在中横梁4与前横梁42底部的行走部件32在钢腹板31延伸悬臂的上沿进行移动;在中横梁4与前横梁42上架设吊机7,脚架71支点分别跨在中横梁4与前横梁42上,吊机7可随挂篮系统移动;
28.所述吊机7转轴上固定回转电机72,回转电机72通过减速箱驱动回转齿轮74转动,进而驱动回转塔架75转动;
29.该吊机作业时通常有两种工况,一是吊装小件,二是吊装大件。对于小件吊装仅即作业半径,不限回转角度全回转,对于同一方向累计转向超过1080度时(即3圈),只能反向转动。对于大件吊装,即半径和回转角度,只能在特定的角度内转动。两种工况均要进行限重;
30.所述回转塔架75一端设置配重73;
31.所述钢腹板31为波纹钢腹板,钢腹板31上沿做为行走部件32行走的槽型钢轨道,轨道两侧壁均布定位销孔;
32.所述中横梁4与前横梁42之间设置牵引拉杆45;
33.所述吊机7的控制台设置在吊机以外区域,控制台设置plc控制;
34.所述回转塔架75上设置测重装置、力矩感应装置和角度感应装置,以上装置连接plc,并通过plc程序控制,实现最大载重限制、作业半径限位、回转角度限位;
35.所述测重装置、力矩感应装置和角度感应装置数据相互关联,使最终整机在桥梁之上的左右扭矩保持在允许范围内;
36.所述控制台上设置手动、半自动两个档位,手动系统与半自动系统相互联动,手动操作时回转角度和回转半径超出plc计算允许的范围时,手动指令将失效;
37.所述吊机可与挂篮组合使用,也可独立于挂篮单独使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。