1.本实用新型涉及一种深井救援机器人,属于深井救援技术领域。
背景技术:
2.随着社会飞速发展,建造了越来越的高楼、大桥等建筑设施,在建造达成建筑设施时会基础打桩,因为地面建筑物如果要建在地面上,地面要承受很大的压力,就必须保证地面有足够的抵抗压力的强度,这个往往很难做到,所以就必须对承受建筑物的地面进行加固或者改善地面的承受方式,所以就想到在地基上打桩,让建筑物的大部分重量通过桩传到地面以下很深的位置,因为这个位置的地基比地面承受能力大得多。大壮过程中会出现人员或钻头掉入深井,就需要井下救援打捞。
3.井下救援是一类常见的消防部队抢险救援任务,据不完全统计,全国大约400~500万口机井,全国每年发生400~500起机井吃人伤人事件,造成直接经济损失3600万元。按30年计算,直接损失10.8亿元,这些还不包括公安、消防、武警、医护人员付出的汗水心血。而每年发生的机井“吃人,伤人”事件所造成的间接损失更是无法计算的。机井吃人伤人让社会付出了生命和财产的沉重代价。各地的消防队经常执行井下救援任务时都是一场生死考验。
4.盖楼还是架桥等大型工程,在动工之前首先要做的就是做基础打柱,打桩时,人员掉入深井的情况也时常发生,工地施工也常常发生钻头掉入深井的情况,一个钻头价值不菲,不将它取出会觉得可惜,更重要的是如果钻头不取出来,那么这个桩孔就算是费了,需要将之前设计好的图纸,施工方案推到重新更换,这样的损失可就太大了。而一次打捞需要花费10000
‑
50000元,而且经常出现下井打捞钻头的人员伤亡,而救援跌入深井的消防员在救援过程中通常是“倒栽葱”的进入含氧量的较低狭窄井内,长时间头部朝下处于低氧环境对人体损伤极大,
5.所以我们团队就像发明一种深井救援机器人,代替救援人员进入深井的过程。
技术实现要素:
6.本实用新型的目的在于提供一种深井救援机器人,该机器人能够代替救援人员下井执行救援任务,避免了下井人员在下井救援过程中发生意外出现伤亡的情况。
7.一种深井救援机器人,包括柱体、固定盘、固定座、履带机构、固定柱、固定块、滑块、固定架、下连杆、上连杆、固定板、框座、伸缩机构、窗口、防坠轮;所述柱体的顶部设有固定盘,固定盘的下方及固定柱的底部分别环型阵列有固定座,固定块环形阵列在柱体的底部,固定块和固定盘之间设有固定柱,固定柱的顶部设有滑块,固定块和滑块左右两端分别设有固定架,履带机构的顶部和底部分别铰接有上连杆、下连杆,上连杆、下连杆的自由端分别铰接在滑块的固定架和固定块的固定架上,其中下连杆向上倾斜,固定板环形阵列安装在柱体上,固定板的内侧对照固定座设有框座,固定板的框座和固定座之间安装有伸缩机构,固定板的中部开设有窗口,窗口处安装有防坠轮,柱体底部安装有打捞装置,打捞装
置包括人员救援机构、钻头打捞机构。
8.在具体设置上述防坠轮时,防坠轮表面环型阵列有凸柱,凸柱逆时针旋扭成弧状;当机器人向上移动出井的过程中,防坠轮顺时针旋转机器人向上移动时摩擦力很小,当机器人出现打滑防坠轮逆时针旋转时,凸柱会与井壁产生巨大的摩擦力,阻止机器人向下滑落,为机器人提供一部分摩擦力,减轻履带机构的负担,双重保障降低打滑下坠的风险。
9.在具体设置上述柱体时,柱体底部安装有喷油机构;喷油机构采用对人体无害的植物油,当救援对象是人,喷油机构对打捞装置上人喷出植物油,油脂可以减小人体与井壁的摩擦,降低对人体的伤害。
[0010] 在具体设置上述柱体时,柱体底部设置有化学反应的器皿;由于井下空气中的含氧量较少,在器皿内假如双氧水及二氧化锰作为催化剂生成氧气,2h2o2=====2h2o o
2 ,mn02做催化剂,器皿选择锥形瓶可以避免机器人在移动过程中产生晃动,导致溶液洒出。
[0011]
在具体设置上述柱体时,柱体下方安装有红外摄像头和补光灯;摄像头连接井外的显示终端如手机、电子显示屏,可以通过红外摄像头看到井下的情况。
[0012]
本实用新型的有益效果在于提供一种深井救援机器人,该机器人能够代替救援人员下井执行救援任务,避免了下井人员在下井救援过程中发生意外出现伤亡的情况,通过更换钻头打捞机构、人员救援机构两种打捞装置来不同的救援任务,设置有防坠轮与履带机构双重保障降低机器人打滑下坠的风险。
附图说明
[0013]
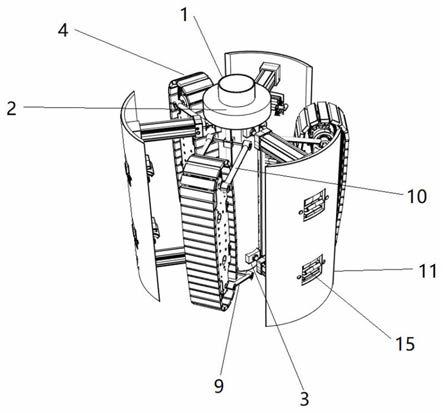
图1是本实用新型的整体结构示意图。
[0014]
图2是本实用新型的履带机构安装示意图。
[0015]
图3是本实用新型的履带机构结构示意图。
[0016]
图4是本实用新型的固定板安装示意图。
[0017]
图5是本实用新型的固定板结构示意图。
[0018]
图6是本实用新型的固定块、滑块结构示意图。
[0019]
图7是本实用新型的防坠轮结构示意图。
[0020]
图8是本实用新型的人员救援机构结构示意图。
[0021]
图9是本实用新型的钻头打捞机构结构示意图。
[0022]
图中,柱体1、固定盘2、固定座3、履带机构4、固定柱5、固定块6、滑块7、固定架8、下连杆9、上连杆10、固定板11、框座12、伸缩机构13、窗口14、防坠轮15。
具体实施方式
[0023]
为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍,以下所述,仅用以说明本实用新型的技术方案而非限制。
[0024]
在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示
或暗示相对重要性或者隐含指明所指示的技术特征的数量;由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征;在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0025]
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通;对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
[0026]
如图1
‑
9所示,一种深井救援机器人,包括柱体1、固定盘2、固定座3、履带机构4、固定柱5、固定块6、滑块7、固定架8、下连杆9、上连杆10、固定板11、框座12、伸缩机构13、窗口14、防坠轮15;所述柱体1的顶部设有固定盘2,固定盘2的下方及固定柱5的底部分别环型阵列有固定座3,固定块6环形阵列在柱体1的底部,固定块6和固定盘2之间设有固定柱5,固定柱5的顶部设有滑块7,固定块6和滑块7左右两端分别设有固定架8,履带机构4环型阵列安装有三个,三点支撑更加稳定,履带机构4的顶部和底部分别铰接有上连杆、下连杆9,上连杆10、下连杆9的自由端分别铰接在滑块7的固定架8和固定块6的固定架8上,其中下连杆9向上倾斜,当机器人下井过程中,柱体1在自身重量的作用下向下坠,在上连杆10、下连杆9的作用下会让履带机构4向外移动,使履带机构4自适应的撑在井壁上,机器人通过履带机构4的驱动完成上下移动,固定板11设有三个环形阵列安装在柱体1上,三点支撑更加稳定,固定板11为弧面板能够贴合井体内部,固定板11的内侧对照固定座3设有框座12,固定板11的框座12和固定座3之间安装有伸缩机构13,伸缩机构13采用气缸,气缸可以无级调节固定板11的外扩长度,固定板11的中部开设有窗口14,窗口14处安装有防坠轮15,防坠轮15可以增大机器人向下移动时的摩擦力,,柱体1底部安装有打捞装置,打捞装置用法兰盘与柱体1底部可拆解的连接,打捞装置包括人员救援机构(如图8)、钻头打捞机构(如图9),人员救援机构成一个l型板,能够给被困人员提供一个支撑平台,钻头打捞机构称成多个倒钩形成的钩爪,用于打捞钻头。
[0027]
在具体设置上述防坠轮15时,防坠轮15表面环型阵列有凸柱,凸柱逆时针旋扭成弧状;当机器人向上移动出井的过程中,防坠轮15顺时针旋转机器人向上移动时摩擦力很小,当机器人出现打滑防坠轮15逆时针旋转时,凸柱会与井壁产生巨大的摩擦力,阻止机器人向下滑落,为机器人提供一部分摩擦力,减轻履带机构4的负担,双重保障降低打滑下坠的风险。
[0028]
在具体设置上述柱体1时,柱体1底部安装有喷油机构;喷油机构采用对人体无害的植物油,当救援对象是人,喷油机构对打捞装置上人喷出植物油,油脂可以减小人体与井壁的摩擦,降低对人体的伤害。
[0029] 在具体设置上述柱体1时,柱体1底部设置有化学反应的器皿;由于井下空气中的含氧量较少,在器皿内假如双氧水及二氧化锰作为催化剂生成氧气,2h2o2=====2h2o o
2 ,mn02做催化剂,器皿选择锥形瓶可以避免机器人在移动过程中产生晃动,导致溶液洒出。
[0030]
在具体设置上述柱体1时,柱体1下方安装有红外摄像头和补光灯;摄像头连接井外的显示终端如手机、电子显示屏,可以通过红外摄像头看到井下的情况。
[0031]
当井下有人或钻头掉落,给机器人选装相应的打捞装置,当机器人进入井体后,柱
体在自身重量的作用下向下坠,在上连杆、下连杆的作用下会让履带机构向外移动,使履带机构自适应的撑在井壁上,机器人通过履带机构的驱动完成上下移动,伸缩机构伸缩机构采用气缸,气缸可以无级调节固定板的外扩长度,是防坠轮能够紧贴深井内壁,当机器人向上移动出井的过程中,防坠轮顺时针旋转机器人向上移动时摩擦力很小,当机器人出现打滑防坠轮逆时针旋转时,凸柱会与井壁产生巨大的摩擦力,阻止机器人向下滑落,为机器人提供一部分摩擦力,减轻履带机构的负担,双重保障降低打滑下坠的风险。
[0032]
尽管参照前述实例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行和修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。