1.本实用新型涉及机器人设备领域,尤其涉及一种智能机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.现有技术中机器人蓬勃发展,常用于做各种精密的活动,比如青少年机器人竞赛上使用的比赛型机器人,备受人们的关注,但传统的比赛型机器人用于夹取色块和拦截对方色块,缺点是夹取色块需调整车架的整体位置,属于粗调,位置调整不够精确,同时拦截网的高度无法调节,适用范围较小,综上所述,本技术现提出一种智能机器人来解决上述出现的问题。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提出一种智能机器人,以解决上述背景技术中提出的问题。
5.基于上述目的,本实用新型提供了一种智能机器人,包括车架、立架以及万向轮组件,所述立架设置在车架顶部中间位置,所述万向轮组件设置在车架底部;包括两个传动块、拦截网、拦截机构以及抓取机构,所述立架内壁对称开设有两个槽体,所述传动块滑动连接在槽体内部,所述拦截网设置在两个传动块内壁,所述拦截机构用于驱动拦截网调整拦截的位置,所述抓取机构设置在车架整体的右侧,且可调整抓取位置,对目标物进行抓取。
6.优选的,还包括两个连接弹簧,所述传动块通过连接弹簧连接在槽体的内顶壁。
7.优选的,所述拦截机构包括第一电机、转盘、滑条、第一滑块以及连接杆,所述第一电机设置在车架上,所述转盘转动连接在车架内壁,且转盘由第一电机驱动转动,所述滑条滑动连接在车架内壁,且滑条上开设有滑槽,所述第一滑块滑动连接在滑条的滑槽内部,且第一滑块转动连接在转盘的表面,所述连接杆的一端与滑条固定连接,另一端与其中一个传动块固定连接。
8.更为优选的,所述车架内壁上设置有为连接杆定向移动的导套。
9.优选的,所述万向轮组件包括四个万向轮,所述四个万向轮由万向节连接在车架底部,且万向节连接有控制器,且控制器与手柄通过无线连接。
10.更为优选的,所述万向轮组件内部每个万向轮均连接有一个陀螺仪,用于矫正万向轮的行走方向。
11.更为优选的,所述车架的前端、后端、左端和右端分别设置有一个超声波距离传感器,并与控制器通过数据线连接。
12.优选的,所述抓取机构包括安装架、第二滑块、第二电机、转轴、滚珠丝杆、滚珠螺母副、气缸、载板、第一夹爪、第二夹爪以及销轴,所述安装架设置在车架侧端,且安装架内部开设有一个开口向下的腔体,所述第二滑块滑动连接在腔体内部,所述第二电机焊接在车架上,所述转轴转动连接在安装架内部,且由第二电机驱动转动,所述滚珠丝杆与转轴同轴固定转动连接在腔体内部,所述滚珠螺母副设置在第二滑块内部,且滚珠螺母副套设于滚珠丝杆外部,气缸设置在第二滑块底部,所述载板设置在第二滑块底部,所述第一夹爪和第二夹爪对称转动连接在载板上,所述第一夹爪和第二夹爪上均开设有一个销槽,所述销轴位于销槽内部,且销轴与气缸的伸缩轴固定连接;
13.更为优选的,所述抓取机构还包括颜色传感器,所述颜色传感器设置在载板底部,且颜色传感器与万向轮组件的控制器通过数据线连接。
14.更为优选的,所述第一夹爪和第二夹爪的内壁设置有软垫。
15.从上面所述可以看出,本实用新型的有益效果:本实用新型通过所述的第一电机、转盘、滑条、第一滑块以及连接杆,可调整所述的拦截网的高度,以适应不同情景下的拦截操作,扩大拦截的范围,以匹配对方的机器人,扩大自身的适应范围;本实用新型通过所述的安装架、第二滑块、第二电机、转轴、滚珠丝杆、滚珠螺母副、气缸、载板、第一夹爪、第二夹爪以及销轴,在调整抓取机构的位置时,不仅可通过万向轮组件进行粗调,又可进行微调,进行精确抓取。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
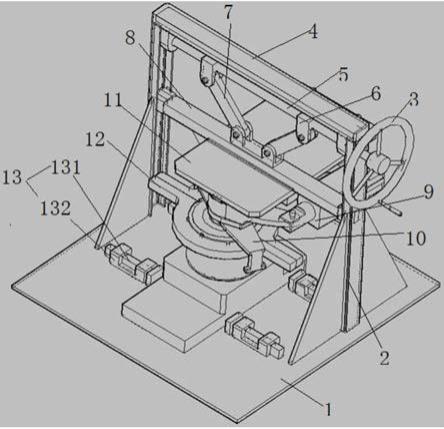
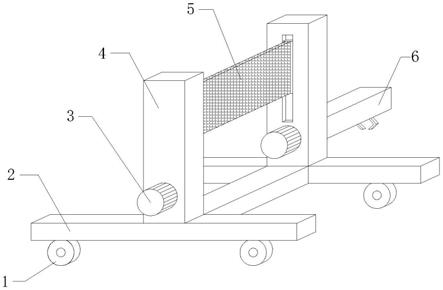
17.图1为本实用新型的结构示意图;
18.图2
‑
图3为本实用新型中拦截机构的结构示意图;
19.图4
‑
图5为本实用新型中抓取机构的结构示意图;
20.图6
‑
图7为本实用新型中控制器的结构框架图。
21.附图标记中:1.万向轮组件;2.车架;3.拦截机构;4.立架;5.拦截网;6.抓取机构;7.传动块;8.连接弹簧;301.连接杆;302.滑条;303.滑槽;304.转盘;305.第一电机;306.第一滑块;307.销轴;601.第二电机;602.安装架;603.滚珠丝杆;604.第二滑块;605.转轴;606.滚珠螺母副;607.腔体;608.气缸;609a.第一夹爪;609b.第二夹爪;610.销槽;611.销轴;612.载板。
具体实施方式
22.为使本实用新型的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型进一步详细说明。
23.需要说明的是,除非另外定义,本实用新型实施例使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的
组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
24.实施例一
25.请参阅图1
‑
图5,一种智能机器人,包括车架2、立架4以及万向轮组件1,所述立架4设置在车架2顶部中间位置,所述万向轮组件1设置在车架2底部;包括两个传动块7、拦截网5、拦截机构3以及抓取机构6,所述立架4内壁对称开设有两个槽体,所述传动块7滑动连接在槽体内部,所述拦截网5设置在两个传动块7内壁,所述拦截机构3用于驱动拦截网5调整拦截的位置,所述抓取机构6设置在车架2整体的右侧,且可调整抓取位置,对目标物进行抓取。
26.作为上述方案的改进方案,还包括两个连接弹簧8,所述传动块7通过连接弹簧8连接在槽体的内顶壁。
27.作为上述方案的改进方案,所述拦截机构3包括第一电机305、转盘304、滑条302、第一滑块306以及连接杆301,所述第一电机305设置在车架2上,所述转盘304转动连接在车架2内壁,且转盘304由第一电机305驱动转动,所述滑条302滑动连接在车架2内壁,且滑条302上开设有滑槽303,所述第一滑块306滑动连接在滑条302的滑槽303内部,所述连接杆301的一端与滑条302固定连接,另一端与其中一个传动块7固定连接。
28.作为上述方案的改进方案,所述车架2内壁上设置有为连接杆301定向移动的导套。
29.作为上述方案的改进方案,所述万向轮组件1内部每个万向轮均连接有一个陀螺仪,用于矫正万向轮的行走方向。
30.作为上述方案的改进方案,所述抓取机构6包括安装架602、第二滑块604、第二电机601、转轴605、滚珠丝杆603、滚珠螺母副606、气缸608、载板612、第一夹爪609a、第二夹爪609b以及销轴611,所述安装架602设置在车架2侧端,且安装架602内部开设有一个开口向下的腔体607,所述第二滑块604滑动连接在腔体607内部,所述第二电机601焊接在车架2上,所述转轴605转动连接在安装架602内部,且由第二电机601驱动转动,所述滚珠丝杆603与转轴605同轴固定转动连接在腔体607内部,所述滚珠螺母副606设置在第二滑块604内部,且滚珠螺母副606套设于滚珠丝杆603外部,气缸608设置在第二滑块604底部,所述载板612设置在第二滑块604底部,所述第一夹爪609a和第二夹爪609b对称转动连接在载板612上,所述第一夹爪609a和第二夹爪609b上均开设有一个销槽610,所述销轴611位于销槽610内部,且销轴611与气缸608的伸缩轴固定连接;
31.作为上述方案的改进方案,所述第一夹爪609a和第二夹爪609b的内壁设置有软垫。
32.工作流程:在利用超声波距离传感器控制万向轮组件1调整车架2的大致位置后,运行第二电机601,第二电机601的输出端带动转轴605转动,转轴605带动滚珠丝杆603转动,滚珠丝杆603转动通过滚珠螺母副606带动第二滑块604在安装架602的腔体607内部左右滑动,调整滑块的位置,进而确定抓取的位置,运行气缸608,气缸608的输出轴伸长通过
销轴611和销槽610的配合,带动第一夹爪609a和第二夹爪609b向着夹角扩大的方向运动,之后,气缸608的输出轴再收缩,带动第一夹爪609a和第二夹爪609b向着夹角减小的方向运动,再通过颜色传感器的配合,进行目标物的夹取,同理,将目标物投入目的地。
33.同时,运行第一电机305,第一电机305的输出端转动带动转盘304转动,转盘304转动带动第一滑块306整体转动,第一滑块306整体转动的同时,在滑条302的滑槽303内部往复滑动,进而,带动滑条302上下移动,滑条302上下移动通过连接杆301带动传动块7在立架4的槽体内部上下移动,传动块7带动拦截网5上下移动,进而确定拦截网5的位置,进而色块的拦截。
34.实施例二
35.请参阅图6
‑
图7,作为上述方案的改进方案,所述万向轮组件1包括四个万向轮,所述四个万向轮由万向节连接在车架2底部,且万向节连接有控制器,且控制器与手柄通过无线连接。
36.作为上述方案的改进方案,所述车架2的前端、后端、左端和右端分别设置有一个超声波距离传感器,并与控制器通过数据线连接。
37.作为上述方案的改进方案,所述抓取机构6还包括颜色传感器,所述颜色传感器设置在载板612底部,且颜色传感器与万向轮组件1的控制器通过数据线连接。
38.工作流程:使用人员可通过手柄控制控制器,通过控制器控制万向节工作,带动万向轮组件1移动,进而通过手柄控制设备的移动的大体方向,也可通过手柄控制抓取机构6运行,对目标块进行抓取。
39.在移动的过程中,超声波距离传感器实时监控设备与外围框架的间距,进而可对设备进行限位。
40.颜色传感器对目标块进行颜色分析,进而将分析结果传递至控制器,控制器控制抓取机构对目标块进行抓取。
41.所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非旨在暗示本公开的范围(包括权利要求)被限于这些例子;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明它们没有在细节中提供。
42.本实用新型的实施例旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本实用新型的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。