1.本实用新型涉及采用智能全向移动机器人的装配定位夹具系统。
背景技术:
2.在汽车装配生产过程中,常常采用夹具固定产品,但需要将夹具输送到不同的工位进行加工,由于夹具的体积较大,通常需要采用行车吊装,使用起来诸多不便,需要操作人员经过专业培训。agv全向车应运而生,大大解决了定位夹具的运输问题,agv全向车是指装备有自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,因其自动化程度高、柔性好、节约人力成本等优点,被广泛应用机械加工、物料装配等行业。但现有的装配定位夹具系统中,智能全向移动机器人充电不便,经常由于不能充分接触,而影响充电效率,甚至充不上电。且现在的agv全向车充电,是在地面铺设充电电极板,agv全向车行驶到充电站指定位置停稳后,小车上的电极与充电电极板相接触,进行充电作业,但当为了节约空间,充电区和待命区共用时,如何解决充电电极板的放置成了有待解决的问题。
技术实现要素:
3.为克服上述缺点,本实用新型的目的在于提供采用智能全向移动机器人的装配定位夹具系统,提高定位夹具的装配效率,且便于充电区的利用。
4.为了达到以上目的,本实用新型采用的技术方案是:采用智能全向移动机器人的装配定位夹具系统,其特征在于:包括上料区、加工区、充电区和能在上述各区之间来回移动的agv全向车,所述上料区、加工区和充电区之间的地面上铺设有对agv全向车进行导向的二维码,所述agv全向车上设置有用于扫描二维码的激光扫描器,所述agv全向车上还设有无线通讯模块,所述agv全向车通过无线通讯模块与控制台进行通讯;所述充电区设置有沿地板向下凹陷有容纳腔,所述容纳腔内设置有在驱动装置作用下上下移动的充电电极组,所述充电极组与位于充电区内的供电桩电连,所述充电极组能在驱动装置作用下与位于agv全向车上的充电片接触导电。
5.本实用新型的有益效果在于:agv全向车能带动定位夹具在上料区和加工区之间来回移动,各个区之间一键呼叫,软硬件共同配合,无需人力来搬运定位夹具,大大提高生产效率。agv全向车的导引系统采用基于行驶路线的二维码导航方法,二维码安装更换方便,后期维护、改造投入成本小,使整个物流系统具有良好的改造、扩展能力。且当agv全向车需要充电时,驱动装置驱动充电电极组与充电片接触导电供电,当agv全向车仅需停靠在充电区待命时,充电电极组与充电片无需接触,减少电弧产生的风险。
6.进一步来说,所述充电极组包括固定座和充电电极板,所述固定座与驱动装置固结,所述充电电极板设置在固定座上端且能沿固定座上下移动,所述固定座为绝缘体,所述充电电极板电连有埋设在地面的埋地线,所述埋地线的另一端与供电桩电连。
7.进一步来说,所述固定座上端面还向下开设有充电电极板滑动的滑槽,所述固定
座和充电电极板之间还设置有压紧弹簧,所述压紧弹簧的一端与滑槽的槽底固结,另一端与充电电极板下端面固结。充电电极板在压紧弹簧作用下向上与充电片紧密抵靠,接触充分。
8.进一步来说,所述充电电极板的上端面为外凸的第一曲面,所述充电片的下端面为与第一曲面匹配的内凹的第二曲面。增加接触面积,能够很好地保证了agv全向车在快速充电过程中的大电流充电现象。
9.进一步来说,所述驱动装置为固定在容纳腔内的电缸,所述电缸的伸缩轴与固定座固结。
10.进一步来说,所述agv全向车包括车身,所述车身的四个角处设置有在行走驱动电机作用下能全向转动的麦克纳姆轮,可更灵活方便的实现全方位移动功能,移动精度万达0.02mm,以达到精确调整被顶工装与外部物体对接精度和调整精度。所述车身内设置有为行走驱动电机供电的锂离子电池,所述充电片为与车身的底部且与锂离子电池电性连接,为锂离子电池充电。
11.进一步来说,所述车身的底面还设置有能于地面抵靠的地刷,所述地刷靠近agv全向车的车头设置,地刷在行走过程中能清扫地面,防止异物干扰二维码和充电电极板。
12.进一步来说,所述车身的外壁上还设置有防撞胶条,当工人接触防撞胶条, agv全向车停止。所述车身上还设置有警报灯,agv运行时通过警报灯照射警示人员注意防护。
13.进一步来说,所述车身内设置有顶端能延伸出车身的剪叉顶升装置,所述剪叉顶升装置的顶端设置有在其驱动下上下移动的顶板。用于顶起质量较大的定位夹具,稳定性好。
14.进一步来说,所述剪叉顶升装置包括同一车身铰接的剪叉式升降架和驱动剪叉式升降架伸缩的液压缸,所述液压缸的壳体与车身的底盘铰接,其液压杆与所述剪叉式升降架铰接,所述车身内还设置有为液压缸供油的液压驱动件,所述顶板与剪叉式升降架的上端铰接。液压驱动稳定性好,推力大。
附图说明
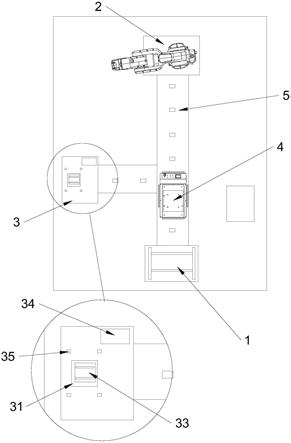
15.图1为本实用新型实施例俯视图;
16.图2为本实用新型实施例中充电区的结构示意图;
17.图3为本实用新型实施例中a处放大图;
18.图4为本实用新型实施例中充电区的剖视图;
19.图5为本实用新型实施例中agv全向车的结构示意图。
20.图中:
[0021]1‑
上料区,2
‑
加工区,3
‑
充电区,31
‑
容纳腔,32
‑
驱动装置,33
‑
充电电极组,331
‑
固定座,332
‑
充电电极板,333
‑
压紧弹簧,34
‑
供电桩,35
‑
定位槽, 36
‑
埋地线,4
‑
agv全向车,41
‑
激光扫描器,42
‑
充电片,43
‑
车身,44
‑
麦克纳姆轮,45
‑
地刷,46
‑
防撞胶条,47
‑
剪叉顶升装置,48
‑
顶板,5
‑
二维码。
具体实施方式
[0022]
下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点
和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
[0023]
实施例
[0024]
参见附图1
‑
5所示,本实用新型的采用智能全向移动机器人的装配定位夹具系统,包括上料区1、加工区2、充电区3和能在上述各区之间来回移动的agv 全向车4。上料区1放置有若干供定位夹具放置的放置架,加工区2能对于定位夹具进行焊接、固定装配灯操作,充电区3能用于agv全向车4的充电或停靠待命。上料区1、加工区2和充电区3之间的地面上铺设有对agv全向车4进行导向的二维码5,agv全向车4上设置有用于扫描二维码5的激光扫描器41,激光扫描器41固定在agv全向车4的车底。agv全向车4上还设有无线通讯模块,无线通讯模块可为gprs模块、wifi模块或5g模块,agv全向车4通过无线通讯模块与控制台进行通讯。
[0025]
agv全向车4能带动定位夹具在上料区1和加工区2之间来回移动,各个区之间一键呼叫,软硬件共同配合,无需人力来搬运定位夹具,大大提高生产效率。agv全向车4的导引系统采用基于行驶路线的二维码5导航方法,二维码5 安装更换方便,后期维护、改造投入成本小,使整个物流系统具有良好的改造、扩展能力。
[0026]
充电区3设置有沿地板向下凹陷有容纳腔31,容纳腔31内设置有在驱动装置32作用下上下移动的充电电极组33。驱动装置32为固定在容纳腔31内的电缸,电缸的伸缩轴与充电电极组33固结。充电极组与位于充电区3内的供电桩 34电连,充电极组能在驱动装置32作用下与位于agv全向车4上的充电片42 接触导电。当agv全向车4需要充电时,驱动装置32驱动充电电极组33与充电片42接触导电供电,当agv全向车4仅需停靠在充电区3待命时,充电电极组33与充电片42无需接触,减少电弧产生的风险。
[0027]
充电极组包括固定座331和充电电极板332,固定座331与驱动装置32固结,充电电极板332设置在固定座331上端且能沿固定座331上下移动,固定座331为绝缘体,可为木质材料或塑料材料。充电电极板332电连有埋设在地面的埋地线36,埋地线36的另一端与供电桩34电连。
[0028]
固定座331上端面还向下开设有充电电极板滑动的滑槽,固定座331和充电电极板之间还设置有压紧弹簧333,压紧弹簧333的一端与滑槽的槽底固结,另一端与充电电极板下端面固结。充电电极板在压紧弹簧333作用下向上与充电片42紧密抵靠,接触充分。充电电极板的上端面为外凸的第一曲面,充电片 42的下端面为与第一曲面匹配的内凹的第二曲面。增加接触面积,能够很好地保证了agv全向车4在快速充电过程中的大电流充电现象。
[0029]
agv全向车4包括车身43,车身43的四个角处设置有在行走驱动电机作用下能全向转动的麦克纳姆轮44,可更灵活方便的实现全方位移动功能,移动精度万达0.02mm,以达到精确调整被顶工装与外部物体对接精度和调整精度。充电区3的地板上还设置有与车轮匹配的定位槽35,定位槽35的深度为2
‑
3mm,便于agv全向车4在充电位置的固定。车身43内设置有为行走驱动电机供电的锂离子电池,充电片42为与车身43的底部且与锂离子电池电性连接,为锂离子电池充电。
[0030]
车身43的底面还设置有能于地面抵靠的地刷45,地刷45靠近agv全向车 4的车头设置,地刷45在行走过程中能清扫地面,防止异物干扰二维码5和充电电极板332。
[0031]
车身43的外壁上还设置有防撞胶条46,当工人接触防撞胶条46,agv全向车4停止。
车身43上还设置有警报灯,agv运行时通过警报灯照射警示人员注意防护。
[0032]
车身43内设置有顶端能延伸出车身43的剪叉顶升装置47,剪叉顶升装置 47的顶端设置有在其驱动下上下移动的顶板48。用于顶起质量较大的定位夹具,稳定性好。剪叉顶升装置47包括同一车身43铰接的剪叉式升降架和驱动剪叉式升降架伸缩的液压缸,液压缸的壳体与车身43的底盘铰接,其液压杆与剪叉式升降架铰接,车身43内还设置有为液压缸供油的液压驱动件,顶板48与剪叉式升降架的上端铰接。液压驱动稳定性好,推力大。
[0033]
以上实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所做的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。