1.本发明属于高空取水技术领域,更具体地说,是涉及一种高空取水装置。
背景技术:
2.在荒漠等地区地表及地下水资源匮乏,造成荒漠地区发展受限。经研究发现,荒漠地区高空中水蒸气含量丰富,例如在伊犁河谷地区,地面至大气层气压850hpa的区域内水蒸气含量为3.5mm,约占整层的29.5%;在大气层气压850hpa至700hpa的区域内水蒸气含量达到4.8mm,占整层的40%,该区域对应海拔高度2000m左右。如果能够充分利用荒漠地区的高空水蒸气作用水源,将会对荒漠地区的发展具有巨大的推动作用。
技术实现要素:
3.本发明的目的在于提供一种高空取水装置,旨在实现将荒漠地区的高空水蒸气转换为液态水,并运送至地面,缓解荒漠地区水资源匮乏的问题。
4.为实现上述目的,本发明采用的技术方案是:提供一种高空取水装置,包括:
5.无人驾驶飞行器,具有容纳腔,所述容纳腔具有通风开口和过水开口,所述无人驾驶飞行器能够实现高空飞行并驻留在高空指定位置;
6.储存仓,设于所述容纳腔内,形成有进气口、出气口和水蒸气出口,所述进气口和所述出气口分别与所述通风开口连通;
7.引风单元,与所述进气口和/或所述出气口连通,以提供换气动力;
8.吸水单元,设于所述储存仓内,用于吸收空气中的水蒸气;
9.加热单元,用于对所述吸水单元加热;
10.制冷单元;以及
11.冷凝仓,设于所述容纳腔内,具有与所述水蒸气出口连通的水蒸气进口,以及出水口,所述出水口与所述过水开口连通,所述冷凝仓用于承接经过所述制冷单元冷凝形成的液态水。
12.在一种可能的实现方式中,所述吸水单元为螺旋状构件,并形成有螺旋状的吸水面,所述吸水单元的外缘与所述储存仓的内壁连接。
13.在一种可能的实现方式中,所述储存仓设于所述冷凝仓外侧,所述水蒸气出口与所述水蒸气进口通过连接管连通,所述连接管上设有第三阀门。
14.在一种可能的实现方式中,所述无人驾驶飞行器上设有气囊。
15.在一种可能的实现方式中,所述高空取水装置还包括太阳能板和电池,所述太阳能板设于所述无人驾驶飞行器外,所述太阳能板与所述电池连接,所述电池还分别与所述引风单元、所述加热单元和所述制冷单元电连接。
16.在一种可能的实现方式中,所述高空取水装置还包括控制器、设于所述进气口的第一阀门和设于所述出气口的第二阀门,所述储存仓内还设有湿度检测器,所述第一阀门、所述第二阀门、所述湿度检测器和所述加热单元分别与所述控制器通讯连接。
17.在一种可能的实现方式中,所述冷凝仓内还设有液位检测器,所述出水口具有可开合的开关件,所述液位检测器和所述开关件分别与所述控制器通讯连接。
18.在一种可能的实现方式中,所述无人驾驶飞行器包括主体和多个螺旋桨,所述主体为圆盘状结构,所述螺旋桨以第一轴线为转轴转动连接于所述主体的外周,且多个所述螺旋桨以所述主体的轴线为对称轴对称设置,所述第一轴线平行于所述主体的轴线。
19.在一种可能的实现方式中,所述进气口、所述出气口和所述出水口均设于所述容纳腔的底部,所述通风开口和所述过水开口连通形成流通开口。
20.在一种可能的实现方式中,所述冷凝仓的顶部形成有锥形的导流面。
21.本发明提供的高空取水装置的有益效果在于:与现有技术相比,本发明高空取水装置的无人驾驶飞行器能够飞入高空中,并在富含水蒸气的区域停留,引风单元将空气由储存仓的进气口抽入储存仓内,空气中的水蒸气被吸水单元吸附,干燥的空气由储存仓的出气口排出,当吸水单元持续吸附水蒸气一段时间后,开启加热单元对储存仓进行加热,使吸水单元上的水蒸气被蒸发析出,水蒸气进入冷凝仓内,一段时间后开启制冷单元对水蒸气进行冷凝降温,水蒸气在冷凝仓内被冷却液化。待收集一定量的液态水后,无人驾驶飞行器降落至地面,由出水口将冷凝仓内的水排出。通过本发明能够将荒漠地区高空中的水蒸气液化后送入地面,缓解荒漠地区的用水紧张的问题,有利于干旱地区的发展。
附图说明
22.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1为本发明实施例一提供的高空取水装置的俯视图;
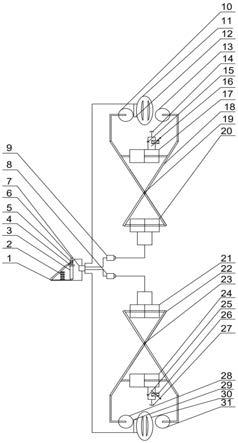
24.图2为本发明实施例一提供的高空取水装置的仰视结构图;
25.图3为本发明实施例一采用的储存仓和冷凝仓的结构示意图;
26.图4为本发明实施例二采用的储存仓和冷凝仓的结构示意图;
27.图5为本发明实施例三提供的高空取水装置的俯视图。
28.图中:1、无人驾驶飞行器;101、主体;102、螺旋桨;103、连接件;104、流通开口;2、储存仓;3、吸水单元;4、加热单元;5、进气口;6、第一阀门;7、引风单元;8、第二阀门;9、出气口;10、连接管;11、第三阀门;12、冷凝仓;13、制冷单元;14、第四阀门;15、出水口;16、太阳能板。
具体实施方式
29.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
30.请一并参阅图1至图5,现对本发明提供的高空取水装置进行说明。高空取水装置,包括无人驾驶飞行器1、储存仓2、引风单元7、吸水单元3、加热单元4、冷凝仓12和制冷单元13,无人驾驶飞行器1具有容纳腔,容纳腔具有通风开口和过水开口,无人驾驶飞行器1能够
实现高空飞行并驻留在高空指定位置;储存仓2设于容纳腔内,储存仓2形成有进气口5、出气口9和水蒸气出口,进气口5和出气口9分别与通风开口连通;引风单元7与进气口5和/或出气口9连通,以提供换气动力;吸水单元3设于储存仓2内,用于吸收空气中的水蒸气;加热单元4用于对吸水单元3加热;冷凝仓12设于容纳腔内,具有与水蒸气出口连通的水蒸气进口,以及出水口15,出水口15与过水开口连通,冷凝仓12用于承接经过制冷单元13冷凝形成的液态水。
31.本发明提供的高空取水装置,与现有技术相比,本发明高空取水装置的无人驾驶飞行器1能够飞入高空中,并在富含水蒸气的区域停留,引风单元7将空气由储存仓2的进气口5抽入储存仓2内,空气中的水蒸气被吸水单元3吸附,干燥的空气由储存仓2的出气口9排出,当吸水单元3持续吸附水蒸气一段时间后,开启加热单元4对储存仓2进行加热,使吸水单元3上的水蒸气被蒸发析出,水蒸气进入冷凝仓12内,一段时间后开启制冷单元13对水蒸气进行冷凝降温,水蒸气在冷凝仓12内被冷却液化。待收集一定量的液态水后,无人驾驶飞行器1降落至地面,由出水口15将冷凝仓12内的水排出。通过本发明能够将荒漠地区高空中的水蒸气液化后送入地面,缓解荒漠地区的用水紧张的问题,有利于干旱地区的发展。
32.具体地,高空取水装置上可以设置水蒸气检测器,能够检测空气中的水蒸气含量,当检测到空气中的水蒸气含量丰富时,使无人驾驶飞行器1停留在该区域。
33.在一些实施例中,请参阅图3至图4,吸水单元3为螺旋状构件,并形成有螺旋状的吸水面,吸水单元3的外缘与储存仓2的内壁连接。
34.本实施例中螺旋状的吸水单元3能够使空气进入储存仓2后沿吸水单元3流动,形成旋流,延长空气在储寸仓2内的停留时间,使空气充分与吸水单元3接触,同时也增加了吸水单元3与水蒸气的接触面积,使吸水单元3更好的吸附空气中的水蒸气,提高吸收效率。
35.可选的,吸水单元3采用mof材质的板状构件,mof是由有机配体和金属离子或团簇,通过配位键自组装形成的具有分子内孔隙的有机
‑
无机杂化材料。这种材料具有高孔隙率、低密度、大比表面积、孔道规则、孔径可调以及拓补结构多样性和可裁剪性等优点。其中,多孔性是材料应用于催化、气体吸附与分离的重要性质,而比表面积是评价多空材料催化性能、吸附能力的另一重要指标。mof材料的高孔隙率和大比表面积使其可以重复吸收空气中的水蒸气。
36.可选的,吸收单元3包括螺旋状的壳体和填设与壳体内的吸附填料,吸附填料可以吸附空气中的水蒸气,并在高温时将水蒸气蒸发析出。
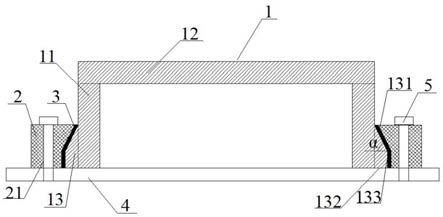
37.在一些实施例中,参见附图3,储存仓2设于冷凝仓12外侧,水蒸气出口与水蒸气进口通过连接管10连通,连接管10上设有第三阀门11。
38.关闭第三阀门11,开启引风单元7,引风单元7将空气由储存仓2的进气口5抽入储存仓2内,空气中的水蒸气被吸水单元3吸附,干燥的空气由储存仓2的出气口9排出,当吸水单元3持续吸附水蒸气一段时间后,开启加热单元4对储存仓2进行加热,打开第三阀门11,使吸水单元3上的水蒸气被蒸发析出,并沿连接管10通入冷凝仓12内,水蒸气在冷凝仓12内被冷却液化。一段时间后,关闭第三阀门11和加热单元4,使冷凝仓12内的水蒸气完全被液化。然后循环上述过程,直至冷凝仓12内的液体达到预设液位时,无人驾驶飞行器1降落至地面,将冷凝仓12内的水由出水口15排出。
39.可选的,制冷单元13为半导体制冷片,半导体制冷片的吸热端与冷凝仓12连通,半
导体制冷片的放热端与储存仓2连通。
40.半导体制冷片没有滑动部件,容纳腔内体积有限,应用半导体制冷片能够减少占用空间,而且半导体制冷片可靠性高、无需制冷剂,避免在高空中发生危险,也避免了使用制冷剂造成环境污染。制冷半导体制冷片的吸热端可以吸附冷凝仓12内的热气,然后通过放热端将热气释放入储存仓2,放热端释放的热量能够提高储存仓2内的温度,有利于水蒸气从吸收件上析出。另外,也可以减少加热单元4的能耗。
41.在一些实施例中,参见附图4,冷凝仓12设于储存仓2内,且储存仓2的顶部与冷凝仓12连通,底部与储存仓2密封隔离。
42.空气在引风单元7的作用下进入储存仓2内,空气中的水蒸气被吸水单元3吸附,当吸水单元3吸附饱和后,开启加热单元4对吸水单元3进行加热,使吸水单元3内的水蒸气蒸发析出,水蒸气从储存仓2的顶部进入冷凝仓12内,开启制冷单元13对冷凝仓12进行冷却,使水蒸气冷凝液化,然后向冷凝仓12底部滴落。
43.可选的,冷凝仓12为隔热构件,避免冷凝仓12与储存仓2之间形成热交换。
44.在一些实施例中,图中未示出,无人驾驶飞行器1设有气囊。
45.气囊可以辅助无人驾驶飞行器1停留在高空中的指定位置,减少无人驾驶飞行器1停驻时的能耗。当冷凝仓12内积聚一定量的液态水后,增加了无人驾驶飞行器1的重量,在无人驾驶飞行器1降落时减少克服气囊浮力产生的能耗。
46.可选的,气囊为环形构件,可以设置在无人驾驶飞行器1的顶部或底部,也可以设置在其他位置。
47.可选的,气囊内填充有氦气,氦气的密度小于空气,能够对无人驾驶飞行器1提供浮力,且氦气稳定性好,不易发生危险。
48.在一些实施例中,请参阅图5,高空取水装置还包括太阳能板16和电池,太阳能板16设于无人驾驶飞行器1外,太阳能板16与电池连接,电池还分别与引风单元7、加热单元4和制冷单元13电连接。
49.太阳能板16将光能转换为电能,并将电能储存在电池内,电池可以为引风单元7、加热单元4和制冷单元13提供电能,保证引风单元7、加热单元4和制冷单元13能够持续工作。避免了电池储存的电量不足时影响高空取水装置的运行,也无需使无人驾驶飞行器1携带多组电池,减少了无人驾驶飞行器1的重量,降低了能耗。
50.可选的,太阳能板16设于无人驾驶飞行器1的顶部。
51.可选的,电池可以为无人驾驶飞行器1的驱动器提供动力,也可以与无人驾驶飞行器1的驱动器的动力源区分设置。
52.在一些实施例中,图中未示出,高空取水装置还包括控制器、设于进气口5的第一阀门6和设于出气口9的第二阀门8,储存仓2内还设有湿度检测器,第一阀门6、第二阀门8、湿度检测器和加热单元4分别与控制器通讯连接。
53.当储存仓2内的湿度达到湿度检测器的第一预设值时,湿度检测器生成加热信号,控制器根据加热信号控制第一阀门6和第二阀门8关闭,加热单元4启动,使吸水单元3上的水蒸气被蒸发析出,并通入冷凝仓12内进行冷却液化。当储存仓2内的湿度达到湿度检测器的第二预设值时,湿度检测器生成停止加热信号,控制器根据停止加热信号控制第一阀门6和第二阀门8开启,加热单元4停止,使外部空气继续进入储存仓2内,吸水单元3对空气内的
水蒸气进行吸附。通过控制器自动控制上述部件的开启和关闭,简化了操作流程,节约了能耗。
54.需要说明的是,第一预设值大于第二预设值。
55.可选的,引风单元7与控制器通讯连接,当湿度达到湿度检测器的第一预设值时,湿度检测器生成加热信号,控制器根据加热信号控制引风单元7关闭;当储存仓2内的湿度达到湿度检测器的第二预设值时,湿度检测器生成停止加热信号,控制器根据停止加热信号控制引风单元7开启。
56.可选的,储存仓2外设有保温层17,用于对储存仓2进行保温。
57.可选的,当储存仓2设于冷凝仓12外侧时,第三阀门11与控制器通讯连接。当储存仓2内的湿度达到湿度检测器的第一预设值时,湿度检测器生成加热信号,控制器根据加热信号控制第三阀门11启动,水蒸气沿连接管10进入冷凝仓12内;当储存仓2内的湿度达到湿度检测器的第二预设值时,湿度检测器生成停止加热信号,控制器根据停止加热信号第三阀门11关闭。
58.可选的,储存仓2内还设有温度检测器,温度检测器与控制器通讯连接,当储存仓2内的温度达到第五预设值时,温度检测器生成第一指令,控制器根据第一指令控制加热器停止加热;当储存仓2内的温度低于第六预设值时,温度检测器生成第二指令,控制器根据第二指令控制加热器开始加热。
59.需要说明的是,第五预设值大于第六预设值,第五预设值为使水蒸气能够蒸发析出的温度值。
60.在一些实施例中,图中未示出,冷凝仓12内还设有液位检测器,出水口15设有可开合的开关件,液位检测器和开关件分别与控制器通讯连接。
61.当冷凝仓12内的液位达到液位检测器的第三预设值时,液位检测器生成开启指令,控制器根据开启指令控制开关件开启;当冷凝仓12内的液位达到液位检测器的第四预设值时,液位检测器生成关闭指令,控制器根据关闭指令控制开关件关闭。
62.需要说明的是,第三预设值大于第四预设值。
63.可选的,开关件为可开合的盖板,盖板的一侧与冷凝仓12转动连接,另一侧可开合。盖板也可以与冷凝仓12滑动连接,从而遮蔽出水口15或使出水口15开启。本实施例中开关件自身具有驱动器,驱动器可以控制盖板的开合。
64.可选的,出水口15连接有出水管,开关件为第四阀门14,开关件设于出水管上。
65.可选的,出水口15设于冷凝仓12底部。
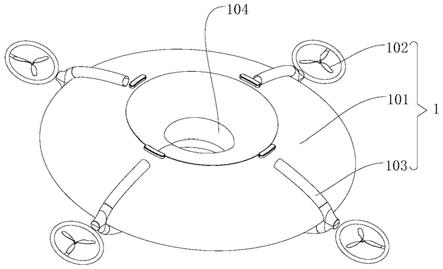
66.在一些实施例中,请参阅图1至图2,无人驾驶飞行器1包括主体101和多个螺旋桨102,主体101为圆盘状结构,螺旋桨102以第一轴线为转轴转动连接于主体101的外周,且多个螺旋桨102以主体101的轴线为对称轴对称设置,第一轴线平行于主体101的轴线。
67.螺旋桨102转动能够使主体101飞行,多个螺旋桨102以主体101的轴线为对称轴对称设置能够使主体101平稳的飞行。圆盘状的结构能够减少飞行时的阻力,降低飞行的能耗,也能够在遇到气流时保证主体101的稳定性。
68.在一些实施例中,请参阅图1至图4,进气口5、出气口9和出水口15均设于容纳腔的底部,通风开口和过水开口连通形成流通开口104。
69.无人驾驶飞行器1为圆盘状结构,在圆盘状结构的底部设置流通开口104,方便进
气口5、出气口9和出水口15进行换气或排水,简化了结构设置,且不影响无人驾驶飞行器1的正常飞行。
70.可选的,气囊设置在无人驾驶飞行器1的底部,且为环形结构,流通开口104设于环形结构的中心部,与气囊不发生干涉。
71.在一些实施例中,请参阅图1至图2,主体101的外周还设有连接件103,连接件103以第二轴线为转轴转动连接于主体101,第二轴线垂直于主体101的轴线,且连接件103与螺旋桨102连接。
72.通过连接件103绕第二轴线旋转使螺旋桨102相对于主体101产生倾斜角度,以改变主体101的飞行方向,使无人驾驶飞行器1能够在高空中灵活转向。
73.需要说明的是,当螺旋桨102随连接件103旋转后,第一轴线不再平行于主体101的轴线。
74.在一些实施例中,请参阅图3至图4,冷凝仓12的顶部形成有锥形的导流面。
75.水蒸气进入冷凝仓12后主要分布在冷凝仓12的上部,通过制冷单元13对冷凝仓12降温使水蒸气液化,液化的水蒸气积聚在冷凝仓12的底部,然后在重力作用下沿锥形导流面向四周流动,经过冷凝仓12的侧壁流入底部,避免了平板状的顶部在水蒸气液化后的水滴直接掉落入底部,长时间的水滴滴落容易造成冷凝仓12底部破损。
76.可选的,当冷凝仓12设置在储存仓2内时,锥形导流面的边缘与冷凝仓12的侧壁上下对应,避免液态水进入储存仓2内。
77.具体地,当冷凝仓12设置在储存仓2内时,锥形导流面的底部对接有导流板,导流板能够将锥形导流面上冷凝的水滴导入冷凝仓12内,避免水滴进入储存仓2。
78.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。