1.本发明属于仿生微型飞行器领域,涉及实现微型扑旋翼飞行器拍动及扭转组合运动的传动机构。
背景技术:
2.微型飞行器具有尺寸小、质量轻、机动灵活以及隐蔽性好等优点,能够实现在狭小空间中完成监测、侦察、电子窃听与干扰等任务,具有极高的实用价值,无论在军事以及民用领域,未来均具有广阔应用前景,因此微型飞行器也成为世界各国学者广泛研究的对象。根据总体结构布局以及飞行模式,将微型飞行器分为微型固定翼飞行器,微型旋翼飞行器,微型扑翼飞行器三类,三类飞行器均具有不同的优缺点和适用环境。微型固定翼飞行器具有高速、结构简单等优点,但机动性差,无法实现垂直起降;微型固定翼飞行器与微型固定翼飞行器相比,虽能实现垂直起降,起飞效率高,但结构复杂、气动效率低;微型扑翼飞行器作为一种新型飞行器,采用仿生学原理设计,飞行过程中噪声小、气动效率高、机动性好,但其起飞效率低,不能完成垂直起降且控制困难。
3.为克服上述微型飞行器的弊端,一种结合扑翼与旋翼的微型飞行器——仿生微型扑旋翼飞行器应用而生。仿生微型扑旋翼飞行器将扑翼中机翼由面对称分布转变为中心对称分布,拍动过程中机翼由于反对称安装而产生一个以翼对称点为中心的力偶,使机翼在在力偶的作用下绕中心轴旋转,从而同时实现扑翼与旋翼的功能。因此仿生微型扑旋翼飞行器兼顾微型旋翼飞行器与微型扑翼飞行器的优点,起飞效率高,能够实现自主起降,而且结构简单、气动效率高,未来发展前景广阔。
4.但目前设计研究的仿生微型扑旋翼飞行器飞行平均升力偏小,机翼下拍过程中虽能很大的正升力,但同时上拍过程中也产生不小的负升力,导致气动效率偏低,如何进一步提高仿生微型扑旋翼飞行器的气动效率仍是目前研究的重点。
技术实现要素:
5.为解决仿生微型扑旋翼飞行器上拍过程中负升力大,导致飞行平均升力小、气动效率低的问题,本发明目的是提供能够实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构,在拍动过程中通过主动改变机翼攻角,在保证机翼下拍过程中正升力最大的情况下,通过扭转调节机翼攻角实现上拍过程负升力的减小,增大飞行器飞行平均升力,并提高飞行器气动效率。
6.本发明的目的是通过下述技术方案实现的。
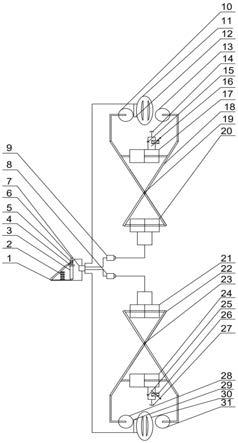
7.本发明公开的实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构,包括机身主轴、旋转机构、拍动扭转机构和机翼。
8.所述机身主轴底端垂直固连于仿生微型扑旋翼飞行器的机身底座,顶端和中部与上旋转机构和下旋转机构连接。
9.所述旋转机构包括上旋转机构和下旋转机构两部分。所述上旋转机构包括机翼拍
动杆安装架、上套筒轴承、上套筒。上套筒顶部穿过上套筒轴承内圈,与上套筒轴承内圈固连,机翼拍动杆安装架与上套筒轴承外圈固连为一个整体。机身主轴顶端穿过与上套筒轴承内圈固连的上套筒,并将上套筒底部固连于机身主轴顶端,使带有上套筒轴承的机翼拍动杆安装架能够绕机身主轴360
°
自由旋转,但不能沿机身主轴上下滑动。
10.所述上套筒轴承的使用,使仿生微型扑旋翼飞行器的旋转运动平滑、顺畅,减小上套筒与机翼拍动杆安装架之间的转动摩擦,降低仿生微型扑旋翼飞行器运动过程中的功耗。
11.所述下旋转机构包括驱动推杆、下套筒轴承、下套筒。下套筒顶部穿过下套筒轴承内圈,与下套筒轴承内圈固连,驱动推杆与下套筒轴承外圈固连为一个整体,机身主轴中部穿过与下套筒轴承内圈固连的下套筒,使带有下套筒轴承的驱动推杆能够绕机身主轴360
°
自由旋转。下套筒底部同驱动器传动杆连接,使驱动推杆能沿机身主轴上下滑动。
12.所述下套筒轴承的使用,使仿生微型扑旋翼飞行器的旋转运动平滑、顺畅,减小下套筒与驱动推杆之间的转动摩擦,降低仿生微型扑旋翼飞行器运动过程中的功耗。
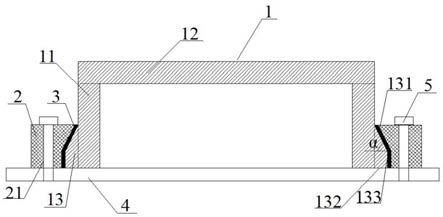
13.所述拍动扭转机构包括机翼拍动杆、扭转件、扭转件挡片和球轴推拉杆。机翼拍动杆前端与机翼拍动杆安装架一侧销钉连接,使机翼拍动杆能够在满足要求范围内上下拍动。所述球轴推拉杆由推拉杆和球体构成,球体安装于推拉杆上端环内构成能够任意转动球轴,推拉杆下端与驱动推杆连接,上端球轴端与扭转件伸长轴固连。所述扭转件与机翼主梁前端固连,安装于根据机翼扭转角度设计的机翼拍动杆的扭转槽中。所述扭转件挡片中心圆孔被机翼主梁穿过,扭转件伸长轴穿过球体中心孔并与之固连,扭转件能够在球轴推拉杆带动下扭转。所述挡片与机翼拍动杆卡槽端外侧固连,限制扭转件在机翼拍动杆的扭转槽中转动,而不能轴向移动。
14.由于金属球表面光滑,转动时与推拉杆之间摩擦小,即能够满足强度和刚度要求又能降低运动过程中功耗,作为优选,所述球体选用金属球。
15.所述机翼共两个,反对称安装于旋转轴两侧。单个机翼包括主梁、垂直于主梁的次梁、翼膜,所述机翼主梁和垂直于主梁的次梁共同构成机翼骨架,翼膜粘接于各翼梁上。所述机翼主梁根部穿过扭转件挡片的圆孔与扭转件固连,扭转件挡片与机翼拍动杆固连,要求扭转件挡片的圆孔的孔径大于机翼主梁直径,防止机翼扭转过程中摩擦的影响。
16.为满足仿生微型扑旋翼飞行器机翼拍动过程中强度和刚度要求,减小机翼质量,作为优选,所述翼梁采用能够满足要求的高模量碳纤维棒。
17.为满足机翼翼膜弹性和韧性要求,减小机翼质量,作为优选,所述翼膜采用聚酰亚胺薄膜。
18.本发明公开的能够实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构工作方法如下:机翼运动过程分为扭转、拍动和旋转三个过程。机翼开始运动阶段,下旋转机构的下套筒在驱动器的带动下沿中心轴运动,下套筒上的驱动推杆也跟随运动,驱动推杆的运动带动球轴推拉杆运动,从而带动与机翼固连的扭转件在扭转卡槽中绕轴心旋转,机翼扭转,直至扭转件旋转到达扭转卡槽中设置的扭转角处停止扭转,此时机翼扭转运动完成。上拍时,扭转件旋转到达扭转卡槽中设置的最大扭转角处停止扭转,机翼达到最大扭转角,处于大攻角状态,上拍过程负升力小;下拍时,扭转件旋转到达扭转卡槽中设置的最小扭转角处停止扭转,机翼扭转角最小,机翼水平下拍,处于小攻角状态,机翼的正升力提升,进而
增大扑旋翼飞行器飞行平均升力,提高扑旋翼飞行器气动效率。
19.扭转运动快速完成后,球轴推拉杆继续运动,此时扭转件不在扭转,而改为推动机翼拍动杆运动。上拍时,球轴推拉杆通过扭转件推动机翼拍动杆使处于大攻角状态的机翼向上运动,完成机翼的上拍运动;下拍时,球轴推拉杆通过扭转件拉动机翼拍动杆使处于小攻角状态的机翼向下运动,完成机翼的下拍运动。
20.扑旋翼飞行器拍动过程中由于机翼反对称安装而产生一个以翼对称点为中心的力偶,使机翼在在力偶的作用下绕中心轴旋转,完成扑旋翼飞行器的旋转运动。
21.有益效果:
22.1、本发明公开的实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构,下旋转机构的下套筒在驱动器的带动下沿中心轴运动,下套筒上的驱动推杆也跟随运动,驱动推杆的运动带动球轴推拉杆运动,从而带动与机翼固连的扭转件在扭转卡槽中绕轴心旋转,机翼扭转。机翼上拍时,在扭转件的扭转下,机翼处于大攻角状态的向上运动,机翼迎风面积小,产生的负升力小;机翼下拍时,机翼因扭转件的扭转处于小攻角状态的向下运动,机翼迎风面积大,机翼的正升力提升,负升力的减小而正升力的提升,进而使整个扑旋翼飞行器在一个拍动周期内产生极大的平均升力,提高扑旋翼飞行器的负载能力和气动效率。
23.2、本发明公开的实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构,在机翼拍动杆上设有用于调整扭转角度的扭转卡槽,通过更改扭转卡槽位置和尺寸实现对扭转件的扭转角度调节,即使扭转件在扭转卡槽中依据设计的角度扭转,与扭转件连接的球轴使得扭转件的扭转流畅、高效,能够迅速平稳完成机翼的扭转运动。
24.3、本发明公开的实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构,上旋转机构和下旋转机构中顺滑转动的套筒轴承,使机翼拍动杆安装架和驱动推杆分别能够绕机身主轴360
°
自由旋转,套筒轴承的使用提高扑旋翼飞行器旋转运动的平滑度和顺畅度,减小上套筒与机翼拍动杆安装架之间、下套筒与驱动推杆之间的转动摩擦,满足机翼旋转时对转速的要求,降低仿生微型扑旋翼飞行器运动过程中的功耗。
25.4、本发明公开的实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构,传动机构整体结构紧凑,加工工艺简单,易装配制作。
附图说明
26.图1是本发明实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构的整体结构示意图。
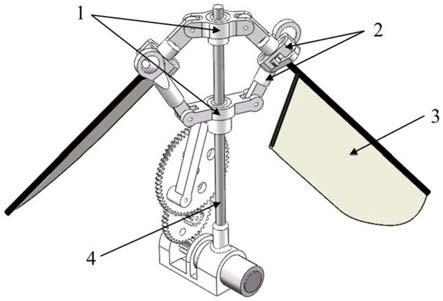
27.图2是本发明实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构的单个机翼结构示意图。
28.图3是本发明实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构的上旋转机构组成示意图。
29.图4是本发明实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构的下旋转机构组成示意图。
30.图5是本发明实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构的扭转机构组成示意图。
31.图6是本发明实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构的球轴推拉
杆的结构示意图。
32.图中:
[0033]1‑
旋转机构2
‑
拍动扭转机构3
‑
机翼4
‑
机身主轴
[0034]
101
‑
上套筒轴承102
‑
上套筒103
‑
机翼拍动杆安装架
[0035]
104
‑
下套筒轴承105下套筒106
‑
驱动推杆
[0036]
201
‑
机翼拍动杆202
‑
扭转件203扭转件挡片
[0037]
204
‑
推拉杆205
‑
球体
[0038]
301
‑
主梁302
‑
垂直于主梁的次梁303
‑
翼膜
具体实施方式
[0039]
为便于更好的实施本发明,阐明本发明的优点,下面结合附图和实例对本发明作详细描述。
[0040]
实施例1:
[0041]
如图1所示,本实施例公开的实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构,包括旋转机构1、拍动扭转机构2、机翼3、机身主轴4。其中,机身主轴4竖直安装于仿生微型扑旋翼飞行器底座。
[0042]
如图2所示,为本实施例实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构的机翼3,整个机翼3包括主梁301、垂直于主梁301的次梁302和翼膜303,所述机翼主梁301和垂直于主梁的次梁302共同构成1/4椭圆形机翼3的骨架,翼膜303按照机翼主梁301和垂直于主梁的次梁302构成的1/4椭圆形平面尺寸裁剪并粘接于机翼3的骨架上。为满足仿生微型扑旋翼飞行器机翼3拍动过程中强度和刚度要求,减小机翼3质量,所述主梁301、垂直于主梁301的次梁302采用能够满足要求的高模量碳纤维棒。为满足机翼翼膜303弹性和韧性要求,减小机翼3质量,所述翼膜303采用厚度为0.015mm的聚酰亚胺薄膜。
[0043]
如图3所示,为本实施例用于实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构中旋转机构1的上旋转机构,包括上套筒轴承101、上套筒102和机翼拍动杆安装架103,上套筒102顶部穿过上套筒轴承101内圈,与上套筒轴承101内圈固连,机翼拍动杆安装架103与上套筒轴承101外圈固连为一个整体,机身主轴4顶端穿过上套筒102,并将上套筒102底部固连于机身主轴1顶端,使机翼拍动杆安装架103能够绕机身主轴4进行360
°
自由旋转,但不能沿机身主轴4上下滑动。上套筒轴承101的使用,使仿生微型扑旋翼飞行器的旋转运动平滑、顺畅,减小上套筒102与机翼拍动杆安装架103之间的转动摩擦,降低仿生微型扑旋翼飞行器运动过程中的功耗。
[0044]
如图4所示,为本实施例用于实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构中旋转机构1的下旋转机构,包括下套筒轴承104、下套筒105、驱动推杆106。下套筒105顶部穿过下套筒轴承104内圈,与下套筒轴承104内圈固连,驱动推杆106与下套筒轴承104外圈固连为一个整体,机身主轴4中部穿过与下套筒轴承104内圈固连的下套筒105,驱动推杆106能够绕机身主轴4进行360
°
自由旋转。下套筒105底部同驱动器传动杆连接,使驱动推杆106能沿机身主轴4上下滑动。下套筒轴承104的使用,使仿生微型扑旋翼飞行器的旋转运动平滑、顺畅,减小下套筒105与驱动推杆106之间的转动摩擦,降低仿生微型扑旋翼飞行器运动过程中的功耗。
[0045]
如图5、图6所示,为本实施例用于实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构中的拍动扭转机构2,所述拍动扭转机构2包括机翼拍动杆201、扭转件202、扭转件挡片203、推拉杆204和球体205,由于金属球表面光滑,转动时与推拉杆204之间摩擦小,即能够满足强度和刚度要求又能降低运动过程中的功耗,所述球体205选用金属球。推拉杆204和金属球205共同构成球轴推拉杆,金属球205安装于推拉杆204前端环内,金属球205能够任意转动,推拉杆204下端与驱动推杆106连接,金属球205中心圆孔与扭转件202伸长轴固连。
[0046]
机翼拍动杆201前端与机翼拍动杆安装架103一侧连接,使机翼拍动杆201能够在满足要求范围内上下拍动。扭转件202与机翼主梁301前端固连,安装于根据机翼3扭转角度设计的机翼拍动杆201的扭转槽中。
[0047]
所述扭转件挡片203中心圆孔被机翼主梁301穿过,扭转件挡片203的孔径大于机翼主梁301直径,防止机翼3转动过程中摩擦的影响。扭转件202伸长轴穿过金属球205中心孔并与之固连,因金属球205能够任意转动,扭转件202能够在球轴推拉杆带动下扭转。所述扭转件挡片203与机翼拍动杆201卡槽端外侧固连,使扭转件202只能在机翼拍动杆的201扭转槽中转动,而不能轴向移动。
[0048]
本实施例公开的实现仿生微型扑旋翼飞行器拍动及扭转运动的传动机构详细工作方法如下:
[0049]
驱动器启动后,旋转机构1的下旋转机构的下套筒105在驱动器的带动下沿机身主轴4运动,下套筒105上的驱动推杆106也跟随运动,驱动推杆106的运动带动推拉杆204运动,从而带动与机翼3固连的扭转件202在机翼拍动杆201扭转卡槽中绕轴心旋转,机翼3扭转,直至扭转件202旋转到达机翼拍动杆201扭转卡槽中设置的扭转角处停止扭转,此时机翼3扭转运动完成,然后做拍动运动。
[0050]
拍动过程中机翼3由于反对称安装而产生一个以翼对称点为中心的力偶,使机翼3在在力偶的作用下绕中心轴旋转,完成扑旋翼飞行器的旋转运动。上旋转机构中的能够顺滑转动的上套筒轴承101和下旋转机构中顺滑转动的下套筒轴承104,使机翼拍动杆安装架103和驱动推杆106分别能够绕机身主轴360
°
自由旋转,套筒轴承的使用提高仿生微型扑旋翼飞行器的旋转运动的平滑性和顺畅度,减小上套筒102与机翼拍动杆安装架103之间、下套筒105与驱动推杆106之间的转动摩擦,降低仿生微型扑旋翼飞行器运动过程中的功耗。
[0051]
在机翼拍动杆201上设有用于调整扭转角度的扭转卡槽,通过更改扭转卡槽位置和尺寸实现对扭转件202的扭转角度调节,即使扭转件202在扭转卡槽中依据设计的角度扭转,与扭转件202连接的能够任意转动的光滑金属球205使得扭转件202的扭转更加流畅、高效,能够迅速平稳完成机翼3的扭转运动。
[0052]
上拍时,扭转件202向上旋转到达机翼拍动杆201扭转卡槽中设置的最大扭转角处停止扭转,机翼3达到最大扭转角,处于大攻角状态,扭转运动快速完成后,推拉杆204继续运动,此时扭转件202不在扭转,而改为推动机翼拍动杆201向上运动,直至到达机翼3最大上拍角,机翼3的上拍运动完成。机翼3上拍时,在扭转件202的扭转下,机翼3处于大攻角状态的向上运动,机翼3迎风面积小,产生的负升力小。
[0053]
下拍时,扭转件202向下旋转到达机翼拍动杆201扭转卡槽中设置的最小扭转角处停止扭转,机翼3扭转角最小,几乎水平下拍,处于小攻角状态,扭转运动快速完成后,推拉
杆204继续运动,此时扭转件202不在向下扭转,而改为拉动机翼拍动杆201向下运动,直至到达机翼3最大下拍角,完成机翼3的下拍运动。机翼3下拍时,机翼3因扭转件202的扭转处于小攻角状态的向下运动,机翼3迎风面积大,机翼的正升力提升。
[0054]
上拍过程中负升力的减小,下拍过程中正升力的提升,进而使整个扑旋翼飞行器在一个拍动周期内产生极大的平均升力,提高扑旋翼飞行器的负载能力和气动效率。
[0055]
以上实施例所述的设计思想、特点以及详细描述,仅为本领域内的技术人员能够理解本发明的内容并据以实施,本发明的保护范围不限于上述实施例,凡在本发明的精神和原则之内,对本发明的原理、设计思路所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。