1.本发明涉及无人智能集群对抗控制方法,尤其涉及高机动性、低耐久性的简单智能体的集群对抗控制方法。
背景技术:
2.当下流行的智能体集群策略主要可以分为三大类:基于物理
‑
数学模型的传统算法、模仿生物集群策略的仿生算法和基于策略奖惩机制的强化学习算法。这三者中,传统算法限制性假设过多、应用范围较小且策略过于死板,而强化学习算法又缺乏可解释性、应用隐患较大。因此,折合两者利弊的仿生算法则是目前适合的研究方向。
3.在诸多生物仿生的可能性中,鹰群较好地满足了无人集群对抗的以众取胜、去中心化等要求。具体说来,鹰群在实际狩猎中,往往能够通过团队配合捕获与自己体量相仿的猎物。同时,这种团队的配合又不依赖于个体间的繁琐沟通,而更多地是依靠个体在统一作战方针下对于局势的独立分析而构建起全局的配合。这些特征使得鹰群的狩猎行为为其对应的仿生控制方法提供了较好模板。
4.目前,基于鹰群狩猎行为仿生的相关研究已经在优化问题上取得了较好的成果,但在无人集群对抗控制方面仍未得到充分的应用。本发明对于基于哈里斯鹰优化算法的数学模型,从对抗问题的实际特征出发,重构出了一种针对于无人集群对抗行为的数学模型,从而提供了一种基于鹰群狩猎行为仿生的的无人智能集群对抗控制方法。
技术实现要素:
5.本发明为了解决低弹药量、低装甲化智能体的集群对抗问题,提供了一种基于鹰群狩猎行为仿生的无人智能集群对抗控制方法及其实现方法。本控制方法可以运用于据点及时防御、敌方目标销毁等军事场合,尤其适用于无明显攻势阶段划分(即两组编队隔开较长的单位时间)的情景。本控制方法可以使智能集群对敌方形成有效地合围歼灭;对于合围附近的零散个体也能作出相应的有效打击。
6.所述的基于鹰群狩猎行为仿生的无人智能集群对抗控制方法是一种不带角色分化、但重视战略阶段分化的仿生的对抗控制方法。所述智能集群中的每一智能体可以根据卫星通讯的低频率定时全局战场信息和实时感知到的视野内战场信息独立地分析当前战场形势、确定实时的对抗行动;所述的战略阶段分化包含分为游走觅敌、软围扰敌、硬围歼敌三个阶段,集群内个体根据自身感知到的信息进行分析、独立地切换行动阶段。
7.结合实际对抗背景而言,游走觅敌对应于对抗的开始阶段,我方集群需要通过保持松散阵型向定时信息描绘的敌方大致位置接近,以增大遇敌概率、较快接触敌军、将接触位置尽量远离需要保卫的后方;软围扰敌阶段对应于遇敌后开始形成合围雏形的阶段,我方智能集群通过小规模扰击阻滞、扰乱敌方行动,提高包围圈内的敌方目标密度,从而优化打击效果;硬围歼敌则对应于我方集群最后的围歼行动,我方智能体快速收拢包围圈,并对敌方目标开展快速打击、予以歼灭。
8.本发明的特点是:
9.(1)本仿生对抗控制方法对于智能体的装甲化和弹药量水平较低,较好地降低了对抗成本;
10.(2)本仿生对抗控制方法软硬围结合的设计在限制敌方行动的同时,较好地提高了智能体弹药使用的效率;
11.(3)智能体行为在确保集群对敌威胁性的前提下,对于个体行动保留了较高的随机性,较好地扰乱了敌方的对抗决策、提高了集群对对抗主动权的把握。
12.(4)智能体行为不需要高频的数据交互共享、也不依赖于其他智能体的存在与否,去中心化程度强;
13.(5)智能体行为遵从相同的控制逻辑,个体之间的行为具有一定的协同性,呈现出具有一定可解释性的整体策略。
附图说明
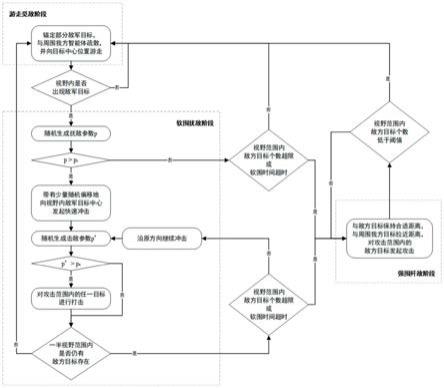
14.图1为基于鹰群狩猎行为仿生的无人智能集群对抗控制方法流程图
具体实施方式
15.下面结合附图对本发明提供的基于鹰群狩猎行为仿生的无人智能集群对抗控制方法及其实现方法进行详细说明。
16.本发明提供一种基于鹰群狩猎行为仿生的无人智能集群对抗控制方法。所述的仿生无人集群对抗控制方法流程如图1所示。在最初的游走觅敌阶段,集群根据当前存储卫星信息选取任意5个敌方目标,锚定其中心位置作为当前游走方向;同时,智能体与视野中的其他我方智能体逐渐拉开距离,以增大遇敌几率,并更好地在下一阶段展开多方位冲击骚扰。当智能体遇敌后,切换为软围扰敌阶段,向视野中敌方目标中心继续移动,并注意继续和其他智能体保持距离;此时,智能体会以较小概率随机采取快速冲击作为骚扰。当智能体视野中的敌方密度足够大或伺敌时间过长时,智能体进入硬围歼敌模式,不再保持距离、转而相互靠近,快速靠近敌方目标,对攻击范围内的任一目标造成打击。
17.下面将对于本仿生无人集群对抗控制方法所涉及的三个阶段的数学模型进行详细说明。
18.1、游走觅敌阶段
19.本仿生无人集群对抗控制方法所述集群游走觅敌阶段主要对应于对抗开始的初期及多次多对抗的间隙。该阶段,我方智能体与敌方目标仍有较远的距离,而敌方目标的位置也仅能通过通讯卫星等系统提供的定时信息来大致推测,则为了更有效地接触到敌军主要目标可以分为两种:智能集群向敌方目标大致位置靠近、集群内部保持分散以增大接触概率。
20.根据这两个行动目的,控制方法将得到对应的两个行动矢量u
to_ene
(i,t)与u
fr_gar
(i,t),分别为t时刻智能体i接近敌群与集群分散的行动矢量。两者归一化后得到的单位行动矢量则分别记为与计算方法如下:
21.[0022][0023]
式中,d
g
(i,t)为t时刻智能体i视野内我方智能体的集合,g
e
为卫星最新交互中数据敌方目标的集合,rand(g,5)为在集合g中随机挑选最多5个对象(不带重复)的操作,x
e
(e,t)为敌方目标e在t时刻的二维坐标;x
g
(g,t)为我方智能体g在t时刻的二维坐标。
[0024]
接近敌群的目标优先级高于集群分散,且两行动矢量所代表的距离(r
to
与r
fr
)对两者比重有所影响,通过该特点则可以权衡出智能体i在t时刻最终的战略行动矢量。计算方法如下:
[0025]
r
to
=‖u
to_ene
(i,t)‖,p
fr
=‖u
to_ene
(i,t)‖
[0026][0027]
如果视野中已然不存在我方智能体,则战略行动矢量直接等同于接近敌群的行动矢量,计算方法如下:
[0028][0029]
我方智能体该阶段的运动速度为也应根据与敌方目标的距离做出实时的调整,越靠近敌军时速度应越慢。计算公式如下:
[0030][0031]
式中,v0(i)为我方智能体i的最大稳定速度,r
ver
(i)为智能体i的视野范围半径。
[0032]
2、软围扰敌阶段
[0033]
本仿生无人集群对抗控制方法所述的软围扰敌阶段对应于遇敌后开始形成合围雏形的阶段,该阶段,我方智能体的主要目标则是通过小规模扰击阻滞、扰乱敌方行动,提高包围圈内的敌方目标密度,从而优化打击效果。
[0034]
为了满足扰击行为本身所必须带有的对敌威胁性、同时保证智能体在下一阶段的弹药量,智能体需要在保证扰击行为存在的同时,将扰击控制在较小的规模中。为了满足这一点,该阶段的控制方法将引入两个随机参数,即扰敌参数p
c
(i,t)和击敌参数p
a
(i,t),及其对应的参数指标,即扰敌指标p
c
和击敌指标p
a
。为了确保威胁性,击敌指标应偏大;为了确保小规模,扰敌指标应偏小。
[0035]
这一阶段的对抗中,我方智能体将不断随机生成扰敌参数p
c
(i,t)。如果p
c
(i,t)未超过扰击指标p
c
,智能体则处于随机游走状态;否则智能体进入扰敌冲击状态,立马对敌方目标中心实行一次快速冲击。在快速冲击过程中,智能体继续不断随机生成击敌参数p
a
(i,t),一旦p
a
(i,t)超过击敌指标p
a
,智能体即刻对于攻击范围内的任一目标进行打击。
[0036]
式中,d
e
(i,t)为t时刻智能体i视野内敌军目标的集合
[0037]
扰敌冲击状态下,智能体在扰击前需要选定战略行动矢量,并在一次扰击的过程中保持该矢量,以最大稳定速度v0(i)运动。该战略行动矢量的计算方法如下:
[0038][0039][0040]
式中,为随机单位矢量。。
[0041]
智能体在扰击时需要判断快速冲击是否结束。结束条件的计算方式如下:
[0042][0043]
式中,r(e,i,t)为t时刻智能体i与敌军目标e的距离,r
ver
为智能体i的视野范围半径。
[0044]
这一判断既可以确保智能体已经尽可能逃离了敌方对象的攻击范围,也可以使得智能体之后的视野内尽快拥有相同的敌方集群,维持软合围的状态。一旦进入软围扰敌阶段,智能体便开始计时,同时关心视野内敌军目标个数,以便于判断是否进入硬围歼敌阶段。
[0045]
3、硬围歼敌阶段
[0046]
本仿生无人集群对抗控制方法所述的硬围歼敌阶段对应于我方集群最后的围歼行动。一旦视野内敌方目标个数到达硬围指标n
c
或软围时间超过软围时阈t
c
,智能体便会进入该阶段。该阶段,我方智能体的主要目标则为互相聚拢以提高集群整体存活概率,并对敌方目标展开迅猛攻击、予以歼灭。
[0047]
该阶段,我方智能体应保持最大稳定速度行动,而其战略行动矢量计算方式如下:
[0048][0049][0050]
r
to
=||u
to_ene
(i,t)||,r
fr
=||u
to_ene
(i,t)||
[0051][0052]
打击力度方面,意识到该阶段的存活困难,智能体将同时对多对象进行快速打击,以更好地体现敌方密集分布对于智能体打击的优势。
[0053]
一旦敌方密度较低,智能体则重新进入游走觅敌阶段;但由于此时已然在战场附近,因此很快也能进入软围扰敌阶段,以保持作战的连续性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。