1.本发明涉及无人智能集群对抗控制方法,尤其涉及高机动性、低耐久性的简单智能体的集群对抗控制方法。
背景技术:
2.随着自动控制、计算机技术等领域的快速发展,智能作战已经成为现代战场发展的一大重点。个体打击性能卓越的尖端智能体固然可以为使用方提供不错的优势,但其在成本、能耗的较大需求也限制了其的配置广度;与之相反,一般的智能体虽然在个体打击性能上面并不占优势,却在机动性能上有相对的优势,可以通过较大规模的集群策略实现更多的需求,从而适用于更广的应用范围。同时,目前的集群研究也主要专注于编队、通讯等方面,在去中心化的对抗控制方面的探索仍相对单薄,仍较少有在智能对抗策略层面的直接讨论。
3.而相较于目前已有的其他无人集群对抗控制方法,基于仿生的控制方法很好地兼顾了可解释性、训练难度和策略灵活性等不同指标间的平衡。而狼群的狩猎特征更是满足了无人集群对抗的以众胜强、去中心化、扰歼相辅等核心要求,为对应的仿生控制方法提供了优质模板。具体说来,狼群的狩猎策略往往能够通过数量的优势和特殊的策略击败比自身体量更大的目标;其狩猎流程也不过分依赖于团队间的繁琐沟通、更多地是依靠个体在统一作战方针下对于局势的独立分析而构建起全局的配合;其狩猎行动也在迅猛高效的歼击过程中,往往附带着对敌方实时决策的较强干扰。
[0004]“狼群战法”这一概念最早在二战欧洲战场的海战中就有所运用,但只是“将成本优势和机动性能优势转化为规模优势、以弥补己方个体力量的平庸”这一基础作战理念,并没有具化为真正的对抗指挥模型。之后的狼群仿生研究则多集中于优化算法,而在集群对抗方面却鲜有设计,存在的设计也过于约束于对狼群完整社会阶级的复现,因复杂的角色设置而提高了方案的实施成本。本发明则从对抗问题的实际特征出发对狼群狩猎行为进行抽象研究,将该对抗思路归纳为更为灵活的角色设计及更为具体的对抗步骤,并建立了简洁有效的数学模型,从而提供一种更适用于无人集群这一特殊主体的控制方法。
技术实现要素:
[0005]
本发明为了解决低弹药量、低装甲化智能体的集群对抗问题,提供了一套基于狼群狩猎行为的仿生控制方法及其实现方法。本控制方法可以运用于据点及时防御、敌方目标销毁等军事场合,在阻塞敌方行动、分割敌军阵型方面有一定的优势。同时,在歼灭局部敌方力量后,本控制方法可以使智能集群继续对其他敌方力量组织积极主动的对抗。
[0006]
所述的基于狼群狩猎行为仿生的无人智能集群对抗控制方法是一种带有战略阶段分化、但更重视角色分工的仿生控制方法。
[0007]
所述的角色分工方面,控制方法将集群简单而不失效能地分化为β体、γ体两种:
[0008]
β体携带弹药数更多、但行动速度较慢,对应于狼群中的“强狼”,负责构建防线、阻
击敌军;γ体行动敏捷、但携带携带弹药较少,对应于狼群中的“弱狼”,负责充分打击、扰乱敌军;β体具有晋升为α体的潜质,晋升成的α体对应于狼群中的“头狼”,负责发出特定信号、将我方集群集结到敌方出现的确切位置。考虑到敌方路径繁多、队列过长、阵型复杂等可能性,控制方法允许多个α体的共存。
[0009]
所述的战略阶段划分方面,β体具有游走觅敌、发令
‑
循令集结、运动阻击三个阶段,γ体具有随群游走、遇敌冲锋两个阶段。每个智能体虽然根据各自的视野信息作出独立的阶段切换,但是战场情势的一致性仍可以将控制方法总体归纳为三个集群阶段:
[0010]
第一阶段对应于对抗开始后的游走阶段,尚不存在α体。β体处在游走觅敌阶段、保持集群间的距离,向敌方目标的大致方向靠近;γ体处于随群游走阶段,跟随附近的β体行动。
[0011]
第二阶段对应于有敌方目标出现在某一β体视野而触发的集结阶段。遇敌的β体晋升为α体,处在发令集结阶段,发出集结信号;接收到信号的β体则处在循令集结阶段,按一定概率选择继续游走觅敌而自己晋升为α体、或着选择迅速前往最靠近的α体处;γ体则仍处随群游走阶段,跟随β体向最靠近的α体处迅速靠拢。
[0012]
第三阶段则对应于我方智能体到达集合处而进入的攻击阶段。α体在保持发令集结的同时,进入运动阻敌阶段,对敌方目标发起运动阻击;当β体到达集合处,转入运动阻敌阶段,协助α体对敌方目标的阻击;当γ体到达集合处,直接进入遇敌冲锋阶段,向敌方目标发起快速冲锋,迅速投放大量弹药,形成大规模打击。
[0013]
本发明的特点是:
[0014]
(1)智能体集群依靠角色分化,形成了目标集中、交替掩护、冲阻配合的对抗格局,更好地提高了智能集群的整体存活率、限制了敌方的行动范围、优化了集群对抗效率、保障了我方据点的安全;
[0015]
(2)智能体集群依靠角色分化,使得智能个体的制造可以按照角色特征、只突出某些方面的优势而降低其他方面的标准,从而有效地降低了整体的成本投入。
[0016]
(3)智能体行为在保证去中心化、低交互率的同时,依靠相同的规则约束,保证了个体行为的整体协同性,呈现出具有一定可解释性的整体策略。
附图说明
[0017]
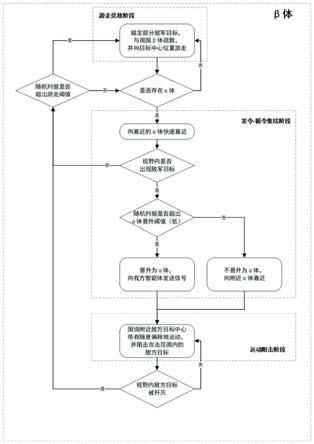
图1为基于狼群狩猎行为仿生的无人智能集群对抗控制方法流程图
具体实施方式
[0018]
下面结合附图对本发明提供的基于狼群狩猎行为仿生的无人智能集群对抗控制方法及其实现进行详细说明。
[0019]
本发明提供一种基于狼群狩猎行为仿生的狼群控制方法。根据我方智能体存在的客观性能差异,所述的控制方法将无人集群划分为弹药多、机动弱的β体和弹药少、机动强的γ体。功能层面上,β体凭借较多的弹药量,负责构建防线、阻击敌军;γ体凭借较优的机动性能,负责充分打击、扰乱敌军。此外,β体还具有晋升为α体的潜质,晋升成的α体可以发出特定信号,负责将我方集群标定敌方出现的确切位置,指引其他智能体向该位置集结。
[0020]
不同的智能体在对抗中会有不同的对抗阶段选择,对应不同的对抗行为模式;每
个智能体会根据根据各自的视野信息以及内嵌的控制逻辑独立地切换对抗阶段、并计算出与阶段相符的行动决策。整体的控制方法流程如图1所示。
[0021]
下面结合图1对本控制方法所涉及的两种作战角色及其多阶段对抗行为的数学模型进行详细说明。
[0022]
1.β体游走觅敌、发令
‑
循令集结、运动阻击阶段的对抗模型
[0023]
本仿生无人智能集群对抗控制方法所述的β体将有三阶段的行为模式,分别为游走觅敌、发令
‑
循令集结和运动阻击阶段。
[0024]
(1)游走觅敌阶段
[0025]
本仿生无人智能集群对抗控制方法所述的β体游走觅敌阶段主要对应于对抗开始的初期及多次多对抗的间隙。该阶段,我方智能体与敌方目标仍有较远的距离,而敌方目标的位置也仅能通过通讯卫星等系统提供的定时信息来大致推测,则为了更有效地接触到敌军主要目标可以分为两种:智能集群向敌方目标大致位置靠近、集群内部保持分散以增大接触概率。
[0026]
根据这两个行动目的,控制方法将得到对应的两个行动矢量u
to_ene
(i,t)与u
fr_gar
(i,t),分别为t时刻β体i接近敌群与集群分散的行动矢量。两者归一化后得到的单位行动矢量则分别记为与计算方法如下:
[0027][0028][0029]
式中,d
g
(i,t)为t时刻我方智能体i(此处为β体)视野内我方智能体(β体和γ体)的集合,g
e
为卫星最新交互中数据敌方目标的集合,rand(g,5)为在集合g中随机挑选最多5个对象(不带重复)的操作,x
e
(e,t)为敌方目标e在t时刻的二维坐标;x
β
(g,t)为β体g在t时刻的二维坐标。
[0030]
接近敌群的目标优先级高于集群分散,且两行动矢量所代表的距离(r
to
与r
fr
)对两者比重有所影响,通过该特点则可以权衡出智能体i在t时刻最终的战略行动矢量。计算方法如下:
[0031][0032]
如果视野中已然不存在我方智能体,则战略行动矢量直接等同于接近敌群的行动矢量,计算方法如下:
[0033][0034]
(2)发令
‑
循令集结阶段
[0035]
本仿生无人智能集群对抗控制方法所述的β体发令
‑
循令集结阶段主要对应于有敌方目标出现在某一β体视野之后的集结阶段,发令针对于晋升为α体的β体而言,循令集结针对于β体而言。该阶段,遇敌的β体将会晋升为α体,并发出集结号令,其他β体则以最大稳定速度v0(i)、向最接近的α体靠近,速度与战略行动矢量的计算方式如下:
[0036]
v=v0(i)
[0037][0038]
式中,d
α
(i,t)为t时刻能被我方智能体i(此处为β体或α体)接收到信号的α体集合,r(k,i,t)为t时刻我方智能体i(此处为β体或α体)距指定对象k的距离。
[0039]
如果靠近过程中,β体在他处发现一处敌方目标,且通过接收到的集结信号感知不到附近的α体,则根据一定概率选择是否停止靠近,在当地晋升为新的α体、组织新的集结。如果突然集结号令消失,则β体重新恢复回游走觅敌阶段。该阶段维持时间视各智能体所处位置而定,很可能极为短暂,甚至α体将保持发令姿态直接进入运动阻击阶段。
[0040]
(3)运动阻击阶段
[0041]
本仿生无人智能集群对抗控制方法所述的β体运动阻击阶段,已经晋升为α体的β体与围绕α体展开行动的β体的共同行为。β体(含α体)一旦遭遇敌方目标则马上开始运动阻击。运动的目的是为了保持对敌、对内的合适距离。因此,战略行动矢量定义为:
[0042][0043][0044]
式中,r
att
(i)为β体i(或α体i)的攻击范围半径,rand(a,b)为a,b间的随机数,为逆时针选择90
°
得到的t时刻β体i(或α体i)战略环行矢量,为随机单位矢量。
[0045]
β体i(或α体i)的运动速度为也应根据与敌方目标的距离做出实时的调整,计算公式如下:
[0046][0047]
一旦视野内没有敌方目标出现,则β体i(或α体i)转为游走觅敌或循令集结的状态,具体选择按一定的概率实现。
[0048]
2.γ体随群游走、遇敌冲锋阶段的对抗模型
[0049]
本仿生无人智能集群对抗控制方法所述的γ体共有两阶段的行为模式,分为随群游走与遇敌冲锋阶段。
[0050]
(1)随群游走阶段
[0051]
本仿生无人智能集群对抗控制方法所述的γ体随群游走阶段主要对应于对抗开始的初期、多次多对抗的间隙以及根据信号向α体靠拢的集结过程。考虑到γ体防御力和弹药数有限,需要其跟随群体一起行动,以发挥和β体互相掩护。
[0052]
γ体在该阶段与β体循令集结阶段的行为策略基本一样。因此,γ体i在t时刻的速度与战略行动矢量,计算方式如下:
[0053]
v=v0(i)
[0054][0055]
式中,x
γ
(g,t)为γ体g在t时刻的二维坐标。
[0056]
唯一的区别是,γ体若仍能通过视野内直接感知、集结信号接收、卫星定时信息分
析等途径感知到β体(含已晋升为α体的β体)存在,则不可能晋升为α体。因此,一般情况下,当敌方目标进入γ体视野时,γ体会直接选择对敌冲锋。此时,由于之前的随群策略,γ体是行动在β体附近的,这一冲锋行为既可以掩护β体形成拦阻战线、也可以对敌造成快速而实际的扰乱与损害,则也满足狼群原本展现的作战习性。
[0057]
(2)遇敌冲锋阶段
[0058]
本仿生无人智能集群对抗控制方法所述的γ体遇敌冲锋阶段主要对应于γ体视野内感知到敌方目标存在的情况。该阶段γ体的行动目标是侧重于对敌打击力度而忽视自我报废问题的,因此,γ体每次可以最多发射最大容量一半的弹药(若敌方目标数不满足,则按照敌方目标数进行打击)。
[0059]
考虑到γ体越深入敌方势力,对敌方造成的干扰和打击越大。因此,γ体应该向视野内敌方目标中心以最大稳定速度移动,速度与战略行动矢量的计算方式如下:
[0060]
v=v0(i)
[0061][0062]
同时,γ体也应该按照一个综合视野内敌方情况而拟合的打击概率p
a
(i,t),来衡量当前是否发动打击行为。该概率的计算方法如下:
[0063][0064]
式中,n
e
(i,t)为t时刻γ体i视野范围内的敌方目标个数,n
c
为推荐智能体进行打击行为的敌方目标个数。
[0065]
如果γ体弹药耗尽,仍应该继续维持冲锋状态,以吸引敌方火力、扰乱敌方阵型、迷惑敌方决策。如果γ体在冲锋后依然存活,则继续发动冲锋、返回靠近的α
‑
β体小集群,继续随群行动、伺机发动冲锋。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。