1.本发明涉及悬浮控制领域,特别是一种磁浮列车、悬浮控制系统及提高运行平稳性的方法。
背景技术:
2.磁浮交通系统是一个集机械工程、控制工程、土木工程等多学科的复杂机电系统,各系统间具有较强的相互影响,列车运行的动力学行为非常复杂。磁浮列车依靠主动控制的电磁铁产生的电磁力悬浮和导向,在直线电机的推进下环抱细长的轨道梁运行,避免了车辆与轨道之间的直接机械接触,但大量动力学问题依然存在。磁浮系统存在非线性的有源磁浮力,使得磁浮车辆系统动力学的研究存在很大特殊性,磁浮列车控制系统的稳定性、整车运行的平稳性直接影响着磁浮列车的发展和应用。
3.整个磁浮列车系统包括机械部分和控制部分,前者包括磁悬浮模块和车体,后者包括悬浮、导向、驱动和运行控制,其中的机械耦合和机电耦合十分复杂。悬浮控制技术是磁浮列车的核心和关键技术之一,悬浮控制系统性能的优劣将直接影响到磁浮列车运行的稳定性、安全性和舒适性。磁浮列车控制的一个最基本要求是要保证磁浮列车能够在一定程度的各种扰动作用下具有平衡稳定的悬浮,作用在悬浮系统的外部扰动主要包括负载变化、驱动加速力和减速力、空气动力以及轨道的弹性弯度和不平顺带来的扰动力。对ems型电磁悬浮系统来说,电磁悬浮就是对车载的、置于导轨下方的悬浮电磁铁通电励磁而产生电场,磁铁与轨道上的铁磁构件相互吸引,将列车向上吸起悬浮在轨道上,磁铁和铁磁轨道之间的悬浮间隙一般为8
‑
12mm。列车通过对控制悬浮磁铁的励磁电流来保证稳定的悬浮间隙,通过磁场与轨道上的铁磁体吸引力作用将车辆吸起,以约8
‑
10mm的间隙悬浮于轨道。安装在电磁铁上的传感器实时测量悬浮间隙和电磁铁加速度,并通过悬浮控制系统调节线圈电流使车辆的悬浮间隙保持在额定值。
4.对于电磁悬浮型列车,系统本身是不稳定的,为了达到悬浮的稳定性,必须采用反馈控制装置,利用悬浮气隙的反馈对电压(流)进行控制。传统的控制方式是将非线性磁悬浮模型在平衡点处进行线性化,然后对该线性化模型进行反馈控制,随着现代控制理论的不断发展,许多先进的控制算法都运用到了磁浮列车的悬浮控制技术中。磁浮列车的自适应控制、模糊控制、滑模结构控制以及鲁棒控制等现代控制方法都被深入研究。早在20世纪70年代,学者们就根据悬浮间隙变化及间隙变化的速度和加速度等输入条件设计了多种经典控制算法,到上世纪80、90年代,为了使系统具有良好的鲁棒性和自适应性,各种非线性的控制算法也在磁浮控制中得到广泛的应用,如h鲁棒控制、自适应控制、滑模变结构控制等。从文献上可以看出,目前悬浮控制系统的重点已经由单纯的稳定性设计转移到系统的鲁棒和自适应能力设计。这样的转变是与磁浮交通技术的实际应用背景密不可分的;为了使磁浮交通技术正式投入使用,从产业化角度考虑,将来磁浮车辆的运行环境变化很大,而且随着长时间运营,轨道线路沉降与不平顺会不断发展,那么就要求控制器必须具有较强的自适应能力和鲁棒性,以满足控制器对复杂环境的适应性要求。
5.高速磁浮列车运行时,若利用单纯反馈控制,则存在参数整定困难、调节时间长、超调量大、抗干扰差等问题,且反馈控制系统从干扰产生到被控量发生变化,以及偏差产生相应的控制作用,再由控制信号改变到被控量发生变化,都需要一定的时间,反馈控制总是落后于干扰作用,也就是说反馈控制无法将干扰克服在被控量偏离设定值之前。由定子面及功能件几何偏差、齿槽和不均匀沉降等造成的轨道不平顺会使列车发生剧烈振动,在长期运营下轨道的几何形态变化对列车运营影响较大。事实上轨道不平顺无法避免,只能定期频繁对轨道进行维养,如此必然导致运营成本增加。
技术实现要素:
6.本发明所要解决的技术问题是,针对现有技术不足,提供一种磁浮列车、悬浮控制系统及提高运行平稳性的方法,通过在磁浮列车悬浮控制中预先施加动态补偿,则可以减弱轨道不平顺对列车运行的影响,从而可以延长轨道养护维修的周期而降低运营成本,提高磁浮交通系统的经济性。
7.为解决上述技术问题,本发明所采用的技术方案是:一种磁浮列车,该磁浮列车的悬浮控制系统在控制程序中提高运行平稳性的方法中,单点悬浮电磁铁的控制方式包括:i,采集电磁铁的垂向加速度和悬浮间隙h
t
,并获取轨道不平顺估计值δh
t
;设计前馈控制器,其传递函数为g
ff
(s)=
‑
k
f
(t
f1
*s 1)/(t
f2
*s 1),k
f
为前馈系数,t
f1
与t
f2
为时间常数;
8.ii,将不平顺估计值δh
t
输入至所述前馈控制器;
9.iii,将所述电磁铁的垂向加速度和悬浮间隙h
t
输入至反馈控制器,将所述前馈控制器与反馈控制器的输出相加后作为单点悬浮电磁铁的输入,得到输出为电磁铁的位移;
10.iv,先整定反馈控制器中的参数,然后对前馈控制器中的前馈系数k
f
与时间常数t
f1
与t
f2
进行参数整定,至电磁铁位移的振荡幅度最小。
11.针对轨道不平顺干扰对磁浮列车悬浮控制稳定性的影响,在获得不平顺估计值δh
t
后,输入至前馈控制中施加动态补偿,结合列车本身的反馈控制,电磁铁位移的震荡幅度越小,悬浮间隙越接近额定值,则可大大削弱不平顺干扰对悬浮控制稳定性的不利影响,通过增加前馈控制,提高了悬浮控制系统的抗干扰能力,因此提高了车辆运行平稳性。由于磁浮列车整车的悬浮控制系统由多个单点悬浮电磁铁控制模块构成,对整车的参数调整较困难,且工作量较大,时间较久,若对某一个单点悬浮电磁铁的控制模块进行参数整定后,将参数应用于整车的所有单点悬浮电磁铁,则只需要再根据实际情况对某些单点悬浮电磁铁的参数进行微调即可,降低了参数的调整难度,且调整参数的工作量与工作时间大大减小。
12.具体地,步骤i的具体实现方式包括:
13.确定列车静态悬浮时悬浮电磁铁所处的位置,并记录此时的悬浮间隙基准h0;每个时间间隔t,记录电磁铁悬浮传感器传来的悬浮间隙h
t
和电磁铁的垂向加速度a
zt
,计算电磁铁垂向动位移d
t
=∫∫a
zt
dtdt;通过公式δh
t
=h
t
‑
d
t
‑
h0计算轨道垂向不平顺估计值δh
t
。
14.具体地,步骤iii的具体实现方式包括;
15.整定前馈系数k
f
:令时间常数t
f1
和t
f2
均为0,当无前馈控制时,电磁铁的输入电流为i1,轨道不平顺值为d1,得到电磁铁位移为y;保持电磁铁位移为y不变,当轨道不平顺值为d2,调节电磁铁的输入电流为i2,根据公式k
f
=(i2‑
i1)/(d2‑
d1)计算前馈系数;
16.整定时间常数:令t
f1
>t
f2
,基于轨道不平顺估计值δh
t
,逐步细致调节t
f1
和t
f2
,使
电磁铁位移y的振荡幅度最小。
17.与现有技术相比,本发明所具有的有益效果为:本发明方法简单、原理清晰,数据来源电磁悬浮系统本身的传感器,数据采集方便,易于实施,符合实际需求,适合大规模推广应用。本发明针对轨道不平顺干扰对磁浮列车悬浮控制稳定性的影响,在获得不平顺干扰预估值后,运用前馈控制对轨道不平顺施加动态补偿,可大大削弱不平顺干扰对悬浮控制稳定性的不利影响,延长轨道养护维修的周期而降低运营成本,进一步提升磁浮列车运行的平稳性和舒适性。本发明通过增加前馈控制,提高了磁浮列车悬浮控制系统的抗干扰能力,提升了悬浮控制系统的鲁棒性和环境适应性,所采用的前馈控制与反馈控制策略,也可迁移用于其他相似的场景。
附图说明
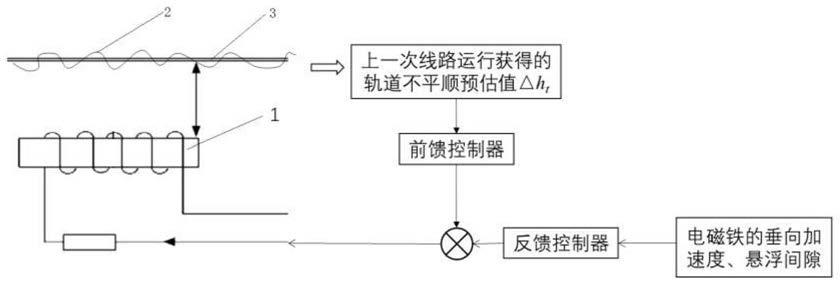
18.图1为本发明一实施例中提高运行平稳性的方法示意图。
19.图2为本发明一实施例中轨道不平顺示意图。
20.图3为本发明一实施例的单点悬浮电磁铁控制动力学模型示意图。
21.图4为本发明一实施例的磁浮列车模型图。
22.图5为本发明一实施例的仿真实验中前馈控制与反馈控制框图。
23.图6为本发明一实施例的仿真实验中无干扰下的悬浮间隙。
24.图7为本发明一实施例的仿真实验中不平顺干扰下的悬浮间隙。
25.图8为本发明一实施例的仿真实验中前馈控制补偿后悬浮间隙。
26.其中,1为电磁铁,2为轨道,3为轨道定子面参考线,4为惯性参考基准线,5为单点悬浮电磁铁控制动力学模型中的轨道模型,6为单点悬浮电磁控制铁动力学模型中的电磁铁模型,7为磁浮列车动力学模型中的车体模型,8为磁浮列车动力学模型中的悬浮架模型,9为磁浮列车动力学模型中的单悬浮点模型,10为磁浮列车动力学模型中的悬浮电磁铁模型,s1为第一开关,s2为第二开关;h0为悬浮间隙基准,h
t
为电磁铁悬浮传感器传来的悬浮间隙,a
zt
为电磁铁的垂向加速度。
具体实施方式
27.本发明一实施例的磁浮列车中,悬浮控制系统包括多个单点悬浮电磁铁的控制模块,所述单点悬浮电磁铁的控制模块中,提高运行平稳性的方法包括轨道不平顺估计值的计算和悬浮前馈控制与反馈控制,其中悬浮前馈控制与反馈控制由悬浮控制器与反馈控制器完成,反馈控制可参考文献“翟婉明,赵春发.磁浮车辆/轨道系统动力学(i)——磁/轨相互作用及稳定性[j].机械工程学报,2005(07):5
‑
14”。
[0028]
其中轨道不平顺估计值的计算是基于上一次磁浮列车运行时电磁悬浮系统的悬浮间隙与电磁铁加速度数据,通过时域计算获得轨道不平顺估计值。而悬浮前馈前馈控制与反馈控制根据上一次运行获得的不平顺估计值,对电磁悬浮施加前馈控制与反馈控制,从而降低随机性不平顺干扰对列车运行平稳性和舒适性的影响。
[0029]
轨道不平顺估计值的计算方法包括:
[0030]
首先,如图2所示,确定列车静态悬浮时悬浮电磁铁所处的位置,并记录此时的悬浮间隙基准h0;
[0031]
其次,每个时间间隔t,记录电磁铁悬浮传感器传来的悬浮间隙h
t
和电磁铁的垂向加速度a
zt
,计算电磁铁垂向动位移d
t
=∫∫a
zt
dtdt;
[0032]
最后,通过公式δh
t
=h
t
‑
d
t
‑
h0计算轨道垂向不平顺估计值δh
t
。
[0033]
悬浮前馈控制与反馈控制的方法在仿真实验中进行,包括:
[0034]
首先,利用多体动力学软件建立单点悬浮电磁铁模型,并基于现有的反馈控制建立反馈式悬浮控制模块,获取单点悬浮电磁铁
‑
控制动力学模型,如图3所示,所述单点悬浮电磁铁
‑
控制动力学模型包括轨道模型5和电磁铁模型6,所述轨道模型5与所述电磁铁模型6之间引入悬浮间隙h
t
作为控制作用的结果,当所述轨道模型5与所述电磁铁模型6之间有控制力,所述悬浮间隙h
t
则发生变化。
[0035]
其次,设计前馈控制器,由于前馈控制器的设计和参数理论整定非常困难,参考经验做法,前馈控制采用动态前馈控制,其传递函数为g
ff
(s)=
‑
k
f
(t
f1
*s 1)/(t
f2
*s 1),k
f
为前馈系数,t
f1
与t
f2
为时间常数;在磁浮列车既有的反馈控制基础上,预先施加针对轨道不平顺的动态补偿,将反馈控制的输出与前馈控制的输出相加后作为单点悬浮电磁铁的输入,将不平顺干扰克服在悬浮间隙偏离设定值之前;
[0036]
开展前馈控制与反馈控制的参数整定,按照先整定反馈控制、再整定前馈控制的步骤进行,反馈控制的参数整定按照现有技术中的工程整定法,可参考文献:刘茹.磁浮列车悬浮系统pid自整定控制研究[d].四川:西南交通大学,2007,然后再在完成参数整定的反馈控制基础上引入前馈控制,并对前馈控制系统进行参数整定。确定前馈控制器参数的方法采用工程整定法,前馈控制系统的整定分成静态前馈系数整定和时间常数整定两步,先逐步调整静态前馈系数使系统的输出减小震荡幅度,然后在此基础上对时间常数进行整定。
[0037]
参数整定的方法具体包括:
[0038]
先整定前馈系数k
f
:令时间常数t
f1
和t
f2
均为0,当无前馈控制时,电磁铁的输入电流为i1,轨道不平顺值为d1,得到电磁铁位移为y;保持电磁铁位移为y不变,当轨道不平顺值为d2,调节电磁铁的输入电流为i2,根据公式k
f
=(i2‑
i1)/(d2‑
d1)计算前馈系数。
[0039]
在实际应用中,y的获取方式为直接测量,可参考文献《磁浮列车》吴祥明,上海科学技术出版社,2003。在仿真实验中,y的获取方式为:在所述电磁铁模型6无输入状态下,测得所述轨道模型5与所述电磁铁模型6的距离为y1,在所述电磁铁模型6的输入为i1时,测得所述轨道模型5与所述电磁铁模型6的距离为y2,通过公式y=y1‑
y2计算y。
[0040]
再整定时间常数:令t
f1
>t
f2
,基于轨道不平顺估计值δh
t
,逐步细致调节t
f1
和t
f2
,使电磁铁位移的振荡幅度最小。
[0041]
最后,利用多体动力学软件建立磁浮列车
‑
控制模型,同时建立整车的前馈控制与反馈式悬浮控制模块,将多个单点悬浮电磁铁
‑
控制动力学模型进行组合,得到磁浮列车
‑
控制动力学模型,将单点悬浮电磁铁
‑
控制动力学模型中的参数应用到所述磁浮列车
‑
控制动力学模型中,根据仿真结果进行微调即可。
[0042]
将仿真中获取的参数应用到实体磁浮列车整车的控制系统中,再根据实际情况进行微调,即可提高该磁浮列车运行过程中的平稳性。
[0043]
在仿真中,磁浮列车模型如图4所示,包括车体模型7,四个悬浮架模型8,七个悬浮电磁铁模型10和二十八个单悬浮点模型9。
[0044]
磁浮列车
‑
控制模型如图5所示,包括由gff(s)实现的前馈控制和由pid实现的反馈控制,轨道不平顺估计值采用白噪声模拟。断开所述第一开关s1和所述第二开关s2,无干扰下悬浮间隙结果为图6;闭合所述第一开关s1,模拟悬浮间隙在轨道不平顺干扰下的结果为图7;引入前馈控制,即闭合所述第二开关s2,模拟悬浮间隙在轨道不平顺干扰和前馈控制补偿综合作用下的结果为图8。图8与图6几乎一致,可见本发明的方法有较好的补偿轨道不平顺干扰的效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。