技术特征:
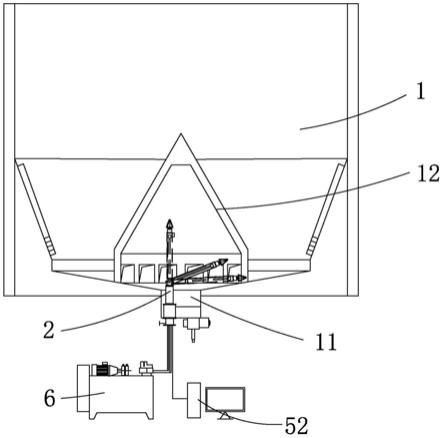
1.一种水下切割机器人,其特征在于,包括:船体;壳体,安装在所述船体下端;切割组件,包括安装在所述壳体内的固定架,安装在所述固定架上的第一伺服电机,转动安装在所述固定架下端且与所述第一伺服电机传动连接的传动轴,安装在所述传动轴两端的一对圆刀片,固定安装在所述固定架上的第二伺服电机,转动安装在所述固定架下端两侧的一对履带,以及安装在每个所述履带上的若干刀头;所述第二伺服电机与履带相互配合,带动履带上的刀片进行转动。2.根据权利要求1所述的一种水下切割机器人,其特征在于,所述切割组件还包括圆周排列在所述传动轴上的一个以上的刀组,所述刀组包括一个以上的定刀片,设置在每个所述定刀片容纳腔,设置在所述定刀片容纳腔内的动刀片,设置在所述转动轴一端上的环形固定套,滑动连接在所述环形固定套上的异形转动杆,套接在所述异形转动杆上的固定套,转动连接在所述异形转动杆上的推杆,转动连接在所述推杆上的转轴,以及固定在所述转轴上扇形转动盘;所述定刀片与所述动刀片相互交叉放置,所述转轴固定安装在所述扇形转动盘的边沿处,所述扇形转动盘在第二伺服电机驱动下进行转动,带动推杆进行移动,在环形固定套与异形转动杆相互配合下,驱动动刀片在定刀片内进行往复移动。3.根据权利要求2所述的一种水下切割机器人,其特征在于,所述异形转动杆包括套接在固定套内的固定杆,固定安装在所述固定杆下端的弧形杆,安装在所述固定杆上端的支撑板,设置在所述支撑板上的固定柱,以及连接在所述支撑板与弧形杆上的支撑杆;所述弧形杆与所述支撑板的转向相反,所述推杆套接在所述固定柱上,所述弧形杆滑动连接在所述环形固定套上。4.根据权利要求2所述的一种水下切割机器人,其特征在于,所述定刀片包括安装在所述安装在所述转动轴上的定刀柄,设置在所述定刀柄上的容纳腔,安装在所述定刀柄上且与所述定刀柄一体成型的若干弧形刀头;所述弧形刀头线性阵列排布在所述定刀柄上,所述容纳腔用于盛放所述动刀片。5.根据权利要求4所述的一种水下切割机器人,其特征在于,相邻所述定刀柄上的弧形刀头相互镜像。6.根据权利要求1所述的一种水下切割机器人,其特征在于,还包括安装在所述切割组件一端上且靠近所述船体的船头的弧形挡板。7.根据权利要求1
‑
6任意一项所述的一种水下切割机器人,其特征在于,还包括安装在所述固定架下端的乁型挡板,所述乁型挡板的弯曲板靠近船体的船头,所述乁型挡板的横板靠近所述传动轴。8.一种水下切割机器人的切割方法,其特征在于,包括以下步骤:s1、利用船体带动切割装置在水里进行移动,并利用壳体;s2、并利用壳体将切割组件进行包裹,避免在船体前进过程中,水草缠绕在所述固定架上;s3、在船体前进的过程中,利用第二伺服电机带动履带进行转动,带动履带上的刀头进行转动,对水里的水草进行初步切割,并利用第一伺服电机带动传动轴进行转动,带动传动轴两端的圆刀片进行转动,对壳体周围的水草进行切割处理;
s4、同时利用乁型挡板将处于壳体内的水草进行收集,并使水草沿乁型挡板进行移动,将水草集中送至传动轴附近,并通过第二伺服电机与扇形转动盘相互配合,带动推杆进行移动,带动异形转动杆进行转动,带动环形固定套在转动轴上进行移动,带动动刀片在定刀片没进行左右移动,对水草进一步进行切割,同时避免水草缠绕在所述转动轴上。
技术总结
本发明公开了一种水下切割机器人及其切割方法,属于切割技术领域。包括船体,安装在所述船体下端的壳体,和安装在所述壳体内的切割组件,其中切割组件包括安装在所述壳体内的固定架,安装在所述固定架上的第一伺服电机,转动安装在所述固定架下端且与所述第一伺服电机传动连接的传动轴,安装在所述传动轴两端的一对圆刀片,固定安装在所述固定架上的第二伺服电机,转动安装在所述固定架下端两侧的一对履带,以及安装在每个所述履带上的若干刀头;所述第二伺服电机与履带相互配合,带动履带上的刀片进行转动。本发明避免水草缠绕在切割组件上,高效的对水中的水草进行割除。高效的对水中的水草进行割除。高效的对水中的水草进行割除。
技术研发人员:刘娜 黄掌飞 黄莘
受保护的技术使用者:南京昱晟机器人科技有限公司
技术研发日:2021.08.19
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。